A/D量化位数对抗干扰性能影响
2012-01-15任松育
张 昆,张 捷,张 星,任松育
(西北工业大学 电子信息学院,陕西 西安 710072)
卫星导航系统在军事和民用领域应用越来越广泛。捕获是获取有效卫星导航信号的一个重要组成部分,并且卫星导航信号的信噪比对捕获性能有很大影响[1]。由于目前导航系统一般采用中频数字化的处理方法,接收机A/D采样量化时会给卫星导航信号带来信噪比的损耗,并且随着A/D量化位数的增高,导航信号的信噪比损耗也随之减小[2]。目前大多数商用的GPS接收机采用的是1位量化器,高端的接收机采用的是1.5或者3位的量化器[3]。通常为了降低造价和延长使用寿命,卫星导航系统的发射功率仅有几毫瓦,到达地面的导航信号更加微弱[4]。以GPS卫星导航系统为例,其到地面的信号功率仅为-130 dBm,这么微弱的信号非常容易受到干扰。通常采用空域滤波的方法抑制导航系统的干扰信号[5],但是在给定的抗干扰指标下,A/D量化误差会带来卫星信号信噪比的损耗,并限制自适应天线的干扰抑制能力[6]。
文中通过大量的实验仿真讨论了A/D量化位数对卫星导航信号相对捕获峰值和输出信噪比的影响,并且在给定抗干扰指标下给出了卫星导航抗干扰系统所需的最小及最多量化位数,为实现导航抗干扰系统时合理选择量化位数提供了理论依据。由于GPS是目前商用和军用最为广泛和成熟的卫星导航系统,因此文中是基于GPS系统进行量化位数对相对捕获峰值影响的理论分析和仿真实验。
1 量化位数对捕获性能的影响
1.1 量化位数对无干扰时捕获影响分析
假设卫星导航信号经下变频器后输入到量化器中,输入的信号可以表示为:

Ai和ci分别为第i颗卫星信号的幅度和扩频码,n(t)为服从N(0,)的高斯白噪声,则经量化器量化后信号为:

其中 ζ(t)为量化噪声,

则量化后信噪比为:

1.2 量化位数对有干扰时捕获影响分析
当外界环境存在干扰时,假设卫星信号同干扰经下变频器后输入到量化器中,输入的中频信号可以表示为:

其中 si(t)为卫星导航信号,ji(t)为干扰信号,则经量化器量化后信号为:

其中ζ(t)为量化噪声。则抗干扰后输出输出信干噪比为:

其中为抗干扰权值。
2 基于Matlab的仿真实验
为了消除数据量化大小的影响,文中将捕获相对峰值大小定义为绝对峰值与其它相位相关值之和的比值,即
相对捕获峰值=最大相关值/(相关值之和-最大相关值)(8)
文中选取的采样频率为62 MHz,利用1 ms数据进行码相关。一般认为捕获成功时的最大相关值为相关值均值的15倍以上。因此,捕获成功时的最小相对捕获峰值为15*1/(62 000-1)=0.000 24。
2.1 无干扰时量化位数的选取
图1~图4表示A/D量化位数分别为 1、3、5、7位时卫星捕获时的相关峰值。从图中可以看出,随着A/D量化位数的增加,卫星捕获时的绝对相关峰值增加,同时其他相位位置相关值也增大。

图1 A/D量化位数为1时捕获相关峰Fig.1 Relative acquisition peak of 1 bit A/D quantization

图2 A/D量化位数为3时捕获相关峰Fig.2 Relative acquisition peak of 3 bits A/D quantization

图3 A/D量化位数为5时捕获相关峰Fig.3 Relative acquisition peak of 5 bits A/D quantization
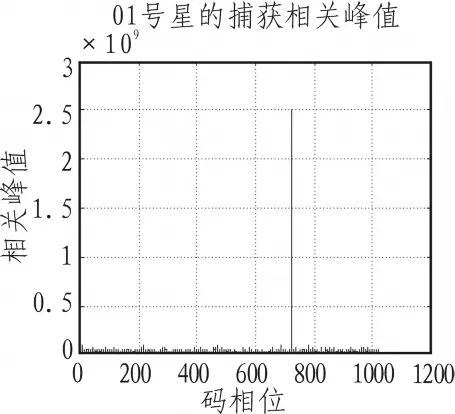
图4 A/D量化位数为7时捕获相关峰Fig.4 Relative acquisition peak of 7 bits A/D quantization
图5 为A/D量化位数对相对捕获峰值的影响。从图中可以看出,当A/D量化位数小于等于4位时,随着量化位数的增加,相对捕获峰值快速增加,说明此时可以通过增加A/D量化位数提高卫星信号的捕获性能;而当A/D量化位数大于4位时,相对捕获峰值基本保持不变。说明此时单纯通过增加A/D量化位数提高卫星信号的捕获性能已不适用。当A/D量化位数为1位时,相对捕获峰值已到达0.000 5,已满足捕获要求,故无干扰时导航接收机常采用1位量化器,而特别高端的接收机采用3-4位量化。

图5 A/D量化位数对相对捕获峰值的影响Fig.5 Affect of quantization bits on relative acquisition peak
2.2 有干扰时量化位数的选取
图6 及图7为输入信干噪比为-60 dB时,固定干扰位置的方位角及俯仰角时的剖面图。从图中可以看出,无论量化位数多少,均能形成零陷。但量化位数较小时,干扰零陷深度较浅且零陷位置与干扰位置有些偏差,同时在其它方向上方向增益波动较大。因此,为了达到较好的抗干扰效果,需要选用较大的量化位数。
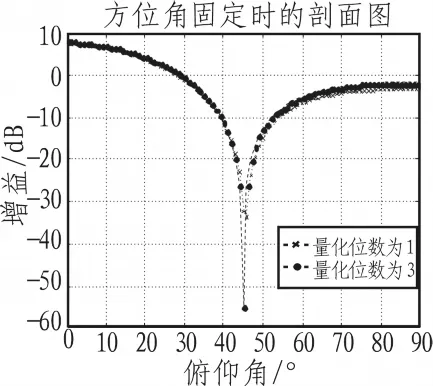
图6 方位角固定时的剖面图Fig.6 Profile of fixed azimuth
图8 A/D量化位数为1时捕获相关峰 图9 A/D量化位数为3时捕获相关峰
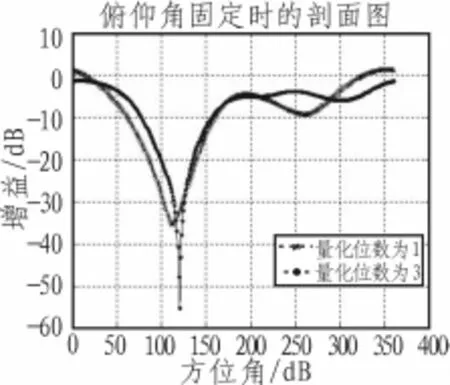
图7 俯仰角固定时的剖面图Fig.7 Profile of fixed pitch angle
图8 ~图11为在输入信干噪比为-60 dB时,A/D量化位数分别为1、3、5、7位时抗干扰后捕获的相关峰值。从图中我们可以看出,当A/D量化位数较低时,无法正常捕获到卫星;当A/D量化位数增大时,可以正常捕获到卫星,并且在码相位处的相关值增大,说明此时捕获卫星相对容易。
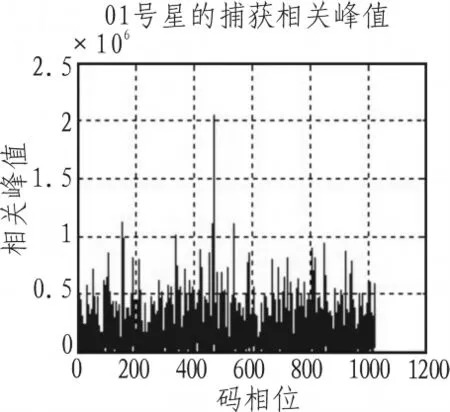
图8 A/D量化位数为1时捕获相关峰Fig.8 Relative acquisition peak of 1 bit A/D quantization
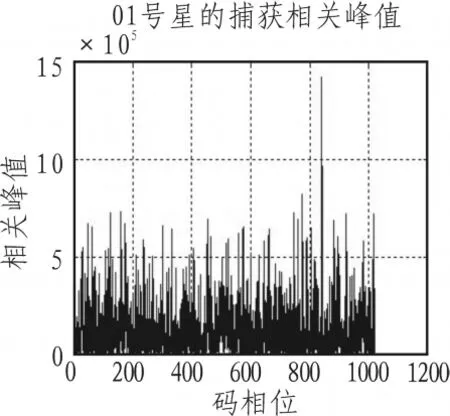
图9 A/D量化位数为3时捕获相关峰Fig.9 Relative acquisition peak of 3 bits A/D quantization
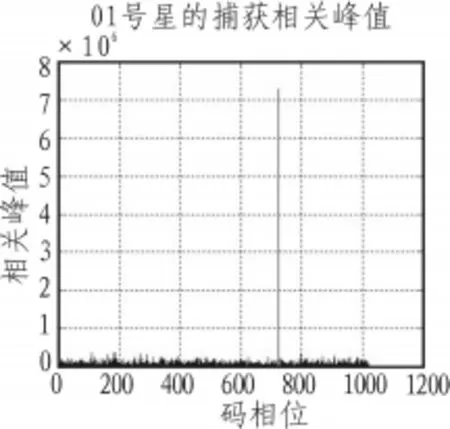
图10 A/D量化位数为5时捕获相关峰Fig.10 Relative acquisition peak of 5 bits A/D quantization
图12 表示了,在输入信干噪比相同的情况下,随着A/D量化位数的提高,抗干扰后导航信号的相对捕获峰值首先保持在一个很低的水平,说明此时该信号无法满足捕获要求;然后相对捕获峰值有较快的提升,这时A/D量化位数对抗干扰有显著的影响,此时可以通过增加A/D量化位数提高抗干扰性能;最后相对捕获峰值在某个值达到稳定,说明此时A/D量化位数已达到满足该抗干扰指标的最大要求。在这种情况下,增加A/D量化位数将是一种浪费。在输入信干噪比不同的情况下,随着输入信干噪比的增大,相对捕获峰值开始上升及达到稳定时所需的A/D量化位数增大,说明当干扰强度增加时,需要适当增加A/D量化位数。

图11 A/D量化位数为7时捕获相关峰Fig.11 Relative acquisition peak of 7 bits A/D quantization
图13 从抗干扰后输出信干噪比方面来考虑A/D量化位数对导航抗干扰性能的影响。从图中可以看出,在输入信干噪比相同的情况下,随着A/D量化位数的增加,抗干扰后输出信干噪比首先增加然后到达一个稳定值。在输入信干噪比不同的情况下,输入信干噪比越大,相同量化位数时的抗干扰后输出信干噪比越小并且抗干扰后输出信干噪比达到稳定时所需的量化位数越多。
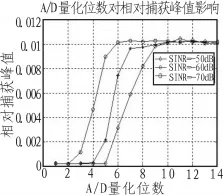
图12 A/D量化位数对捕获相关峰值影响Fig.12 Affect of quantization bits on relative acquisition peak
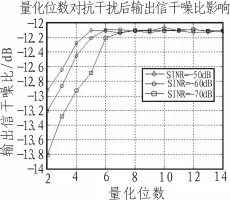
图13 A/D量化位数对输出信干噪比影响Fig.13 Affect of quantization bits on output SINR
图14 及图15分别为输入信干噪比对相对捕获峰值及抗干扰后输出信干噪比的影响。从图中可知,当量化位数一定时,随着输入信干噪比的增加,相对捕获峰值及抗干扰后输出信干噪比下降,并且量化位数越小时,相对捕获峰值从稳定值开始下降并达到最小值时的输入信干噪比越小;当输入信干噪比一定时,量化位数越多其相对捕获峰值及抗干扰后输出信干噪比越大。

图14 输入SINR对相对捕获峰值的影响Fig.14 Affect of input SINR on relative acquisition peak
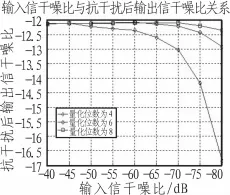
图15 输入SINR对抗干扰后输出的影响Fig.15 Affect of input SINR on output after anti-jamming
图16 为输入信干噪比与A/D量化位数关系,即在成功抑制输入干扰的情况下所需的最少A/D量化位数及最多量化位数。从图中可以看出,随着输入信干噪比的增加,所需最多A/D量化位数基本呈线性上升,输入信干噪比每增加5dB所需A/D量化位数增加1位。
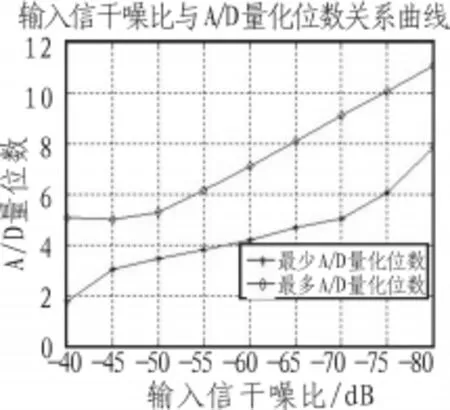
图16 输入信干噪比与A/D量化位数关系Fig.16 Relationship between input SINR and quantization bits
3 结 论
文中主要分析了A/D量化位数对卫星导航信号相对捕获峰值和输出信噪比的影响。首先在理论上分析了A/D量化对无干扰和有干扰存在情况下性噪比的影响,其次分析了无干扰时量化位数对相对捕获峰值的影响,并着重分析了量化位数对抗干扰性能的影响,并在给定抗干扰指标下给出了卫星导航抗干扰系统所需的最小及最多量化位数,为实现导航抗干扰系统时合理选择量化位数提供了理论依据。
[1]孙进芳,李晓白,金天.量化对GPS接收机捕获性能的影响[J].雷达科学与技术,2007,5(6):477-480.SUN Jin-fang,LI Xiao-bai,JIN Tian. Influence of quantization on acquisition performance of GPS receiver[J].Radar Science and Technology,2007,5(6):477-480.
[2]魏颖康,谈展中.GPS抗干扰接收机中高性能ADC应用[J].电子测量技术,2003(4):34-35.WEI Ying-kang,TAN Zhan-zhong.Using high performance ADC for GPS Anti-jam application[J].Electronic Measurement Technology,2003(4):34-35.
[3]孟建,王春丽,李其勤.量化位数对GPS转发干扰的影响研究[J].电子对抗技术,2002,17(2):11-16.MENG Jian,WANG Chun-1i,LI Qi-qin.Researchs in bit influence on GPS repeater jamming[J].Electronic Warfare Technology,2002,17(2):11-16.
[4]干国强,邱致和.导航与定位-现代战争的北斗星 [M].北京:国防工业出版社,2000.
[5]张琳,初海彬.卫星导航用户机空时滤波抗干扰技术[J].北京航空航天学报,2007, 33(1):76-80.ZHANG Lin,CHU Hai-bin. Space-time interference suppression technology of satellite navigation receiver[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(1):76-80.
[6]卢艳娥,谈展中,杨军,等.A/D量化对GPS接收机自适应天线性能的影响[J].宇航学报,2004, 25(2):235-240.LU Yan-e,TAN Zhan-zhong,YANG Jun,et al.The effect of the A/D quantization on the performances of GPS receiver adaptive antenna[J].Journal of Astronautics,2004,25 (2):235-240.
