采用前馈定时同步的解调器设计与实现
2012-01-14彭继强桑会平
彭继强,桑会平
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
定时同步电路是解调器的关键组成部分,准确的定时同步可以找到每个码元的最佳采样点,是解调器正常工作的前提,而不准确的定时同步会导致解调器性能下降,严重时甚至会导致无法完成解调功能。按实现结构不同,定时同步可分为反馈式和前馈式2种方法。
无人机数据链系统中的解调器,常采用反馈式定时同步方法来实现定时同步,反馈式定时同步是锁相环结构,工作稳定且定时精确,可以取得较好的解调性能。经以往很多型号的无人机数据链系统验证,在无人机巡航阶段,采用反馈式定时同步的解调器工作稳定可靠,性能优越,但在无人机起降阶段,偶有发生解调器工作不稳定的情况。无人机在起飞和降落阶段,距离地面高度较低,跑道周边地形复杂,信号反射路径较多且能量较强,是比较复杂的多径信道,接收信号变化很快,在一些极端情况下,反馈式定时同步的锁相环受输入信号相位变化影响频繁失锁,且失锁后重新锁定时间较长,导致解调器工作不稳定。而前馈式定时同步是开环结构,能快速跟踪输入信号相位变化。因此,设计了一种采用前馈式定时同步的解调器,以解决解调器在无人机起降阶段工作不稳定的问题。
1 反馈和前馈定时同步原理对比
定时同步电路主要包括定时误差检测器和内插器,定时误差检测器估计输入序列的定时偏差值,内插器根据定时偏差值对输入序列进行内插,得到与接收符号同步的输出序列。反馈式定时同步与前馈式定时同步的主要区别在于定时误差检测器和内插器是否构成闭环结构,如图1所示。反馈式定时同步是闭环结构,其结构如图1(a)所示,内插器的输出反馈到定时误差检测器的输入,定时误差检测器估计残余的定时误差,经环路滤波,调节NCO的输出,控制内插器进行内插,这种锁相环结构有较高的环路增益,定时精确,但锁相环跟踪速度较慢,易受相位变化的影响。前馈式定时同步是开环结构,所有的信号流向都是前向的,其结构如图1(b)所示。信号采样值被直接用于定时误差估计,定时误差换算成内插参数,控制内插器输出,这种开环结构能快速跟踪输入信号相位变化,所以前馈式定时同步适用于对跟踪速度要求较高的系统,如突发通信或多径信道等。根据无人机起降阶段的信道特点,选择前馈式定时同步是恰当的。

图1 前馈式与反馈式定时同步结构图
2 前馈定时同步算法选择和参数设计
前馈式定时同步的设计,主要包括定时误差估计算法、插值算法的选择和参数设计。
前馈定时误差估计算法可分为数据辅助和非数据辅助2类。数据辅助算法需要在原数据流中插入前导序列,增加系统带宽开销;非数据辅助算法常见的有O&M算法、WPZ算法和改进WPZ算法3种,在高信噪比条件下或估计长度较长时,3种算法的跟踪精度差别很小,因此选用运算量最小的O&M定时误差估计算法。
O&M算法将输入数据按L个符号长度分段缓冲进行处理,并要求采样时钟频率是符号速率的N倍(N≥4),则每段数据包含LN个采样点,计算LN个采样点的FFT:
式中,εm为O&M算法估计出的相位误差,是符号最佳判决点与第0个采样点的相对相位偏差,如图2所示,其取值范围为
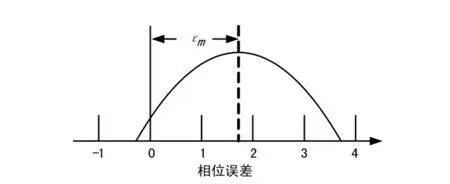
图2 O&M算法估计出的相位误差
O&M定时误差估计算法的分段缓冲长度L是非常重要的参数,LN越大,则精度越高,运算复杂度也越高,但对输入信号相位快速变化的适应能力变差。同样的,采样频率倍数N越大则精度和复杂度越高。综合考虑同步性能、工作稳定度以及工程实现复杂度等因素,选择L为1 024个符号,选择N为4倍,每次定时误差估计的采样点数LN=4 096。无人机数据链系统通常采用10-6精度的晶振,则每段数据内的定时偏差变化为10-3量级,因此可以认为1 024个符号中每个符号的最佳判决点与其第0个采样点的相对偏差是相同的,整段数据可按相同的εm进行处理。
内插器选择线性插值算法,线性插值运算复杂度低,也能取得很好的性能,采用4倍符号速率采样的线性插值器,在误码率为10-2和10-6时的Eb/N0损失分别为0.02 dB和0.05 dB[6]。考虑因果性,线性插值的输出时刻在符号判决点后面最近的采样点mk,如图3所示。
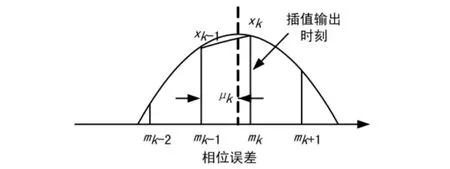
图3 插值前和插值后的定时相位图
线性插值算法的计算式为:

x为插值器输出,xk为mk点的采样值,xk-1为mk-1点的采样值,μk为最佳采样点与mk-1点的相对位置。mk和μk由相位误差εm换算得到,换算方法如下:

将定时误差检测器输出的相位误差εm代入到式(4)和式(5)中计算,即可得到内插系数 mk和 μk。
3 解调器实现
解调器的完整信号处理流程如图4所示。
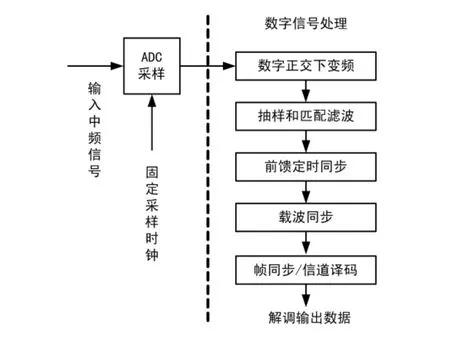
图4 解调器的信号处理流程图
ADC以固定的采样时钟对输入中频信号采样,经数字正交下变频,得到IQ 2路基带信号,该基带信号的采样率较高,经抽样和匹配滤波,得到4倍符号速率采样的基带信号,其存在定时相位误差和载波相位误差,经前馈定时同步,消除定时误差,再经载波同步,消除载波相位误差,恢复出准确的基带信号,经帧同步和信道译码等处理,输出解调数据流。其中,匹配滤波采用4倍采样的滚降系数α=0.5的平方根升余弦滤波器;前馈定时同步按第2节的描述进行设计;载波同步采用科斯塔斯环;信道译码采用 LDPC(1 280,1 024)译码。
解调器的ADC采样电路选用Analog Devices公司的模数转换芯片AD9230,所有的数字信号处理在Xilinx公司的现场可编程门阵列芯片XC5VSX95T和TI公司的数字信号处理芯片TMS320C6455中实现。
4 性能测试
根据无人机在起飞和降落阶段的信道模型[2],选择莱斯因子为6 dB的莱斯信道,用信道模拟器测试采用前馈定时同步的解调器在不同信噪比下的误码性能。
经测试,解调器能快速锁定且工作稳定,误码率曲线如图5所示,解调性能良好,而以往采用反馈定时同步的解调器在此条件下频繁失锁,已不能正常工作。

图5 解调误码率曲线
5 结束语
介绍了前馈式定时同步的原理,进行了前馈式定时同步算法和参数的具体设计,给出了一个采用前馈式定时同步的解调器设计,并进行测试。该解调器经实际验证,功能正常稳定,并能取得很好的误码性能,满足了系统的需求。
[1] 桑会平,胡秀娟.地空高速数据链的关键技术[J].无线电工程,2009,39(2):32-34.
[2] 高保生,朱良彬.无人机地空链路信道特性与宽带数据传输[J].无线电工程,2011,41(9):4-6.
[3] OERDER M,MEYR H.Digital Filter and Square Timing Recovery[J].IEEE Transactions on Communications,1988,36(5):605-611.
[4] ZHU W-P,AHMAD M O,SWAMY M N S.A Fully Timing Recovery Scheme Using Two Samples per Symbol[C]//in Proc IEEE ISCAS2001,Sydney,Australia.2001:421-424.
[5] GARDNER FM.Interpolation in Digital Modems-Part I: Fundamentals [J].IEEE Transactions on Communications,1993,41(3):501-507.
[6] GARDNER F M.Interpolation in Digital Modems-PartⅠ: Fundamentals[J].IEEE Transactions on Communications,1993,41(6):998-1008.