收发分置声纳浅海近程混响信号建模研究
2012-01-10胡家福朱广平张卫强
胡家福,朱广平,张卫强,2
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨150001;2.海军东海舰队海洋水文气象中心,浙江 宁波 315122)
收发分置声纳浅海近程混响信号建模研究
胡家福1,朱广平1,张卫强1,2
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨150001;2.海军东海舰队海洋水文气象中心,浙江 宁波 315122)
研究了收发分置声纳浅海近程混响的建模与仿真,模型主要基于单元散射理论,依据散射系数相关半径来划分海面、海底散射单元,通过模拟海面、海底混响形成的物理过程建立单接收与多接收模型。模型中考虑声纳设备参数(指向性、收发位置、发射信号)及环境因素(海面运动、海底粗糙程度)对混响建模的影响。设计程序实现浅海近程单接收与多接收混响信号模型并仿真计算出混响时间序列,提供GUI(Graphical User Interface)用户图形界面支持。对建模仿真的混响信号进行统计分析,验证了论文建立的浅海混响信号模型的正确性。
浅海;混响;散射单元;统计特性
早期的混响信号建模大多建立在单元散射单元理论基础上只针对海底界面建模[1],在模型基础上对混响信号自相关函数进行了分析[2],换能器指向性建模方法[3]也得到了进一步的研究,文献[4]仿真了运动声纳的混响信号,文献[5]研究了一种基于HODGKISS单元散射理论的海洋混响的阵列模型。近年来的研究[6-7]通常先估计混响的时变强度,然后在瞬时混响振幅服从瑞利分布及相位服从均匀分布的假设下产生时变随机混响信号,而相关设备参数(如:指向性、束宽等因素)、海面因素等均未在模型中得到体现。本文在单元散射理论的基础上,通过模拟海面、海底双层界面的混响形成物理过程进行建模。模型中考虑声纳设备参数及环境因素对混响建模的影响,根据实际情况分别建立并实现了收发分置单接收和多接收声纳的混响信号模型,并对混响信号进行统计分析与检验。
1 模型的建立
模型的建立要考虑多种因素影响,包括海面运动引起的多卜勒效应、海面和海底不平整程度对混响信号的振幅、频率及相位相关参数的影响、发射和接收设备参数等。本文首先研究收发分置单接收基阵的建模问题,并在实现单发单收的基础上,进一步完成多接收模型的建立。
1.1 单接收模型的建立
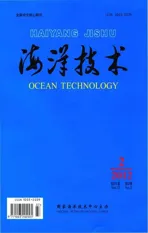
单接收模型示意如图1所示,虚线表示发射信号,实线表示散射信号。由于是浅海近程混响,不考虑信号的多途反射,发射信号到达散射单元后经过一次散射后到达接收点的所有散射信号迭加得到模型的仿真混响信号。
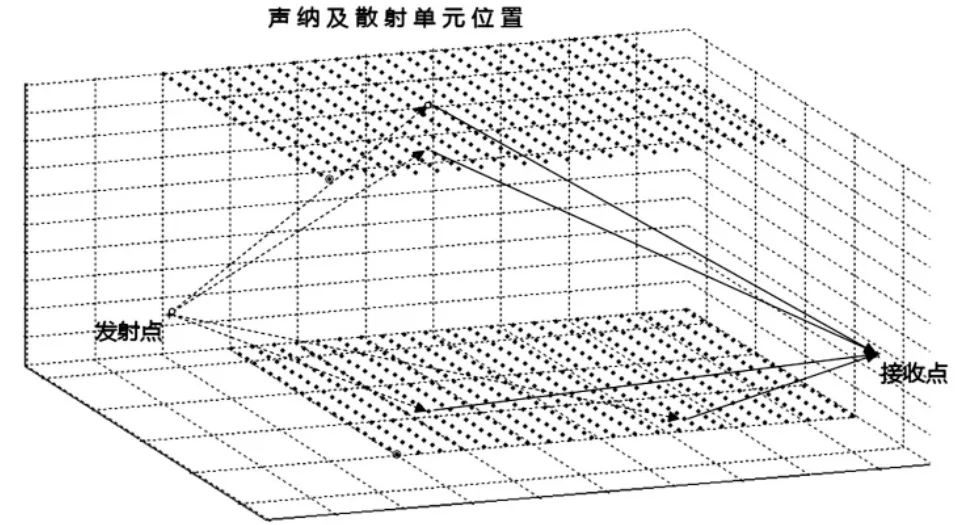
图1 单接收模型示意图
图2(a)表示发射信号经散射单元散射后到接收基阵,信号在接收点迭加。混响信号用公式可表示为:

式中:a(ti)是相应于第i散射体的散射波的随机幅度,丨a(ti)丨模值服从瑞利分布,相角服从均匀分布(0~2π)。函数v(t-ti)表示单个散射信号的形状。
信号发射到海面过程后,海面波浪运动会引起信号频率的多卜勒频移,此处假设频移服从高斯分布。对于设备参数中的指向性设定,本文不考虑复杂的指向性旁瓣,只考虑发射及接收设备主瓣束宽。因为是浅海建模,水深将有一定限制,而发射、接收设备坐标则可以设定在深度范围内任意位置处。模型中角度的定义如图3所示,α是方位角,θ是俯仰角,分别以X和Z轴为正方向,方位角范围在-180°~180°,俯仰角范围在 -90°~90°。
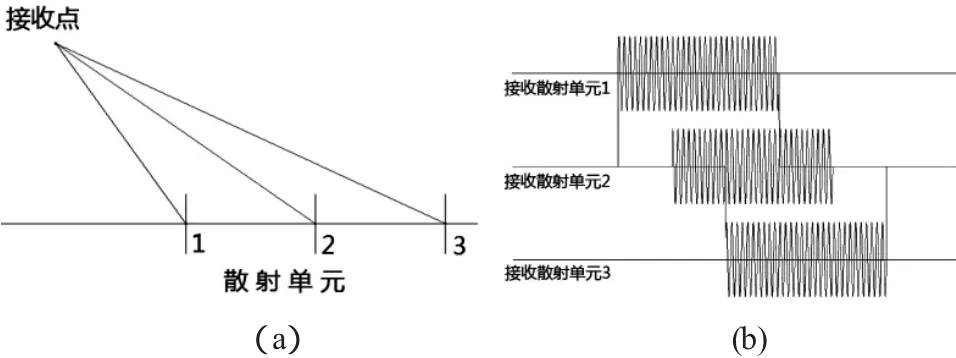
图2 散射信号的移位累加

图3 三维空间各角度定义示意图
信号自发射声纳发出经过海面,海底的散射单元后散射到接收声纳,在此过程中,要考虑传播距离引起的衰减,海面运动引起的频率展宽及海面和海底散射信号振幅的瑞利分布和相位均匀分布规律。这里要说明的是,对于海面和海底都将考虑振幅的改变,即通过散射单元后振幅将按瑞利分布重新分配,而频率的展宽只应用于海面情况,经过散射单元散射的信号相位分布则是在0~2π内均匀分布的。
首先对于信号在整个过程中因为距离而引起的衰减规律建模。假设信号初始幅值为A,信号幅值按距离一次方衰减,则信号到达散射单元的振幅为A/r1,其中r1为发射声纳到散射单元的距离。如果不考虑散射引起的振幅和相位变化,则信号自散射单元到接收声纳,此时接收声纳接收到的信号幅值为A/(r1·r2),其中,r2为散射单元到接收声纳的距离。在模型当中,界面是由许多散射单元组成的,作用于接收器的总散射声信号幅值为每个体元的贡献之和:

式中:n为散射单元总个数。
考虑海面和海底的作用后,在声纳指向范围内,得到最终混响信号表示如下:

式中:ωi为随机多普勒频移;φ(ti)为随机相位。
1.2 多接收模型的建立
在单接收模型的基础上,建立了多接收模型。
如图4所示,信号从声纳发出,经过海底、海面一次散射后到达多个接收设备,海面、海底的不平整性及海面的波浪运动都将影响混响信号的改变,所有散射单元散射回来的信号在接收设备处迭加。
图4 多接收模型示意图
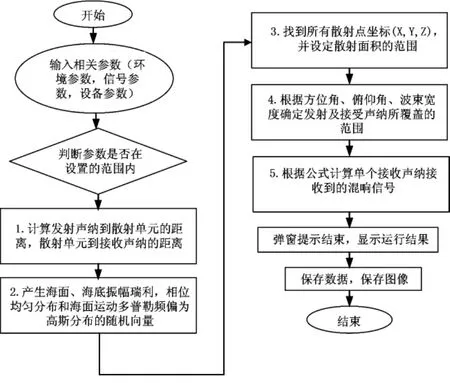
图5 单接收模型程序框图
2 模型的程序实现
2.1 单接收模型的实现
为了更好地介绍模型的实现过程,绘制程序框图如图5所示。模型选用CW脉冲信号作为发射信号。设备参数相关的模型实现,指向性,角度的限定部分,α,θ角通过反三角函数即可求出,对应于每个散射单元都有一个独立的α和θ角与之对应,这样只要通过限定α,θ的取值范围,就可以控制设备的方位角,俯仰角,水平束宽,垂直束宽。对于发射、接收换能器的位置坐标可以任意设定。实现时各角度范围为:方位角 0°~360°,俯仰角 -90°~90°,水平束宽 0°~360°,垂直束宽 0°~360°。
如图6所示,发射点的坐标(-1 500,500,-500),接收点的坐标(3 000,-1 500,-600),接收点相对发射点在右前方,其中,发射换能器方位角 20°,俯仰角 0°,水平束宽 60°,垂直束宽360°(即垂直方向不限定);接收换能器方位角110°,俯仰角0°,水平束宽45°,垂直束宽360°。图中,绿色实点部分即发射信号所能到达的区域范围,黄色圆圈区域表示接收换能器所能接收到散射信号的区域范围,重叠部分即为有贡献的散射区域。由此可以非常直观地观察到信号投影面积,及接收换能器所能接收到的信号方位。由该模型可得到的仿真混响信号如图7所示。
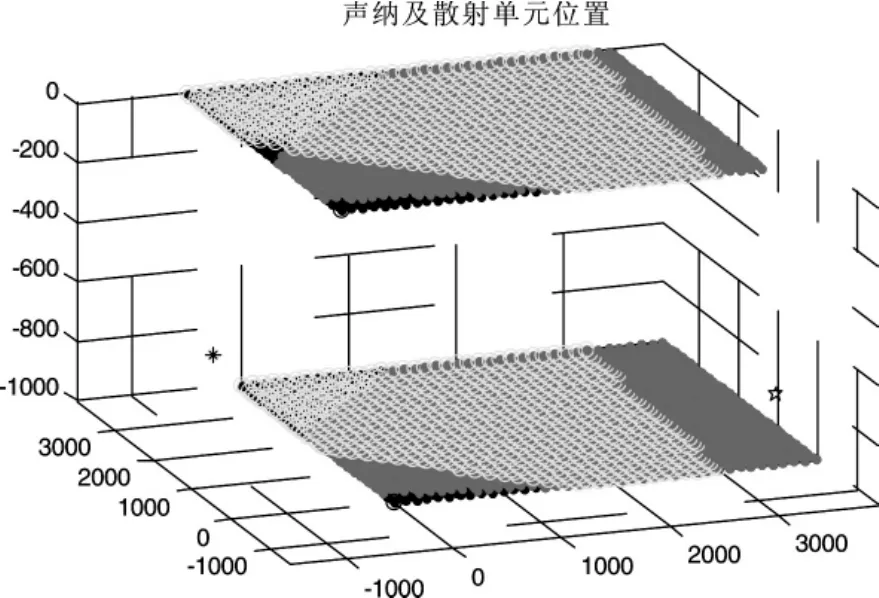
图6 实现单接收模型示例图
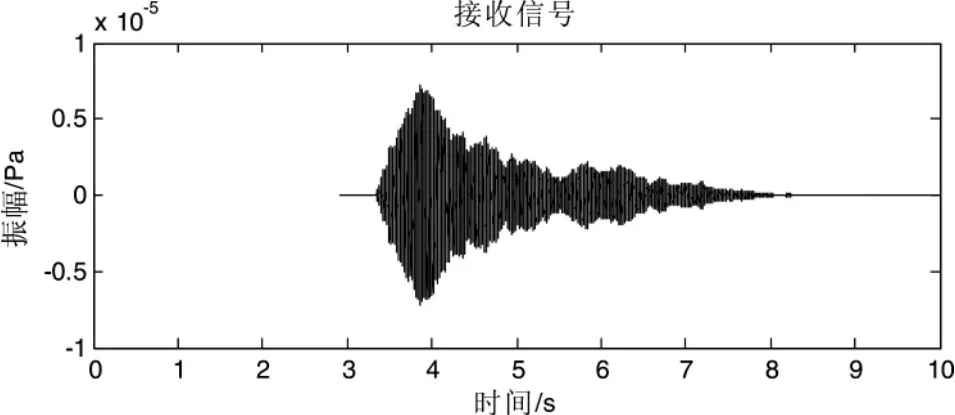
图7 接收器得到的混响信号
由于从散射单元散射回来的信号振幅、频率、相位都是随机的,每次运行的结果,得到的混响都会不同,体现混响的随机过程。最后,为了方便用户操作及更直观的显示程序结果,加入GUI图形用户界面,如图8所示。
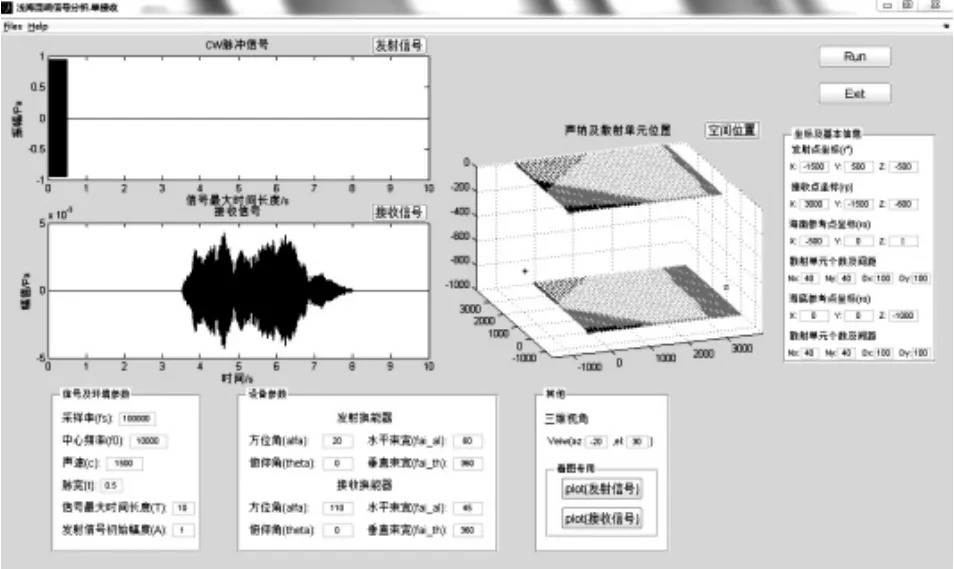
图8 单接收模型界面
2.2 多接收模型的实现
对于多接收模型,接收基阵的数量增加了,但信号的统计特性没变,在不改变振幅、频率、相位的模型的前提下,加入多个接收基阵,即形成多接收模型。多接收基阵的设备参数范围一致。
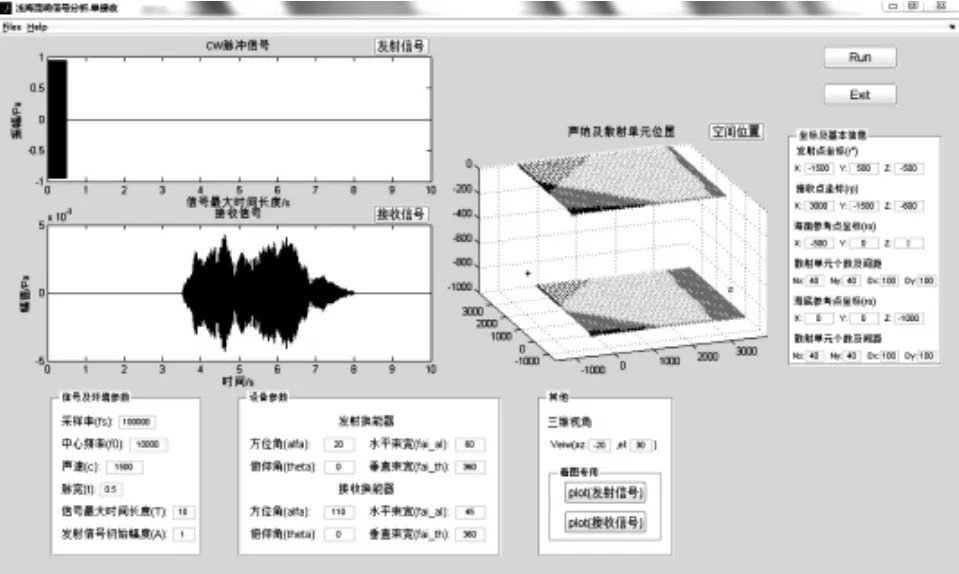
图9 实现多接收模型示例图
如图9所示,绿色实点为发射信号的覆盖范围,其他颜色均为接收基阵所能接收到散射信号区域范围。橙色圆圈为接收基阵1,水平束宽30°,垂直束宽无限制;蓝靛色棱形为接收基阵2,水平束宽20°,垂直束宽20°,指向海面;红色五角星为接收基阵3,水平束宽30°,垂直束宽20°;紫色倒三角为接收基阵4,水平束宽10°,垂直束宽无限制;黑色正方形为接收基阵5,水平束宽30°,垂直束宽10°,指向海面;发射阵是全指向性,接收基阵均为定向接收。发射声纳和各接收器的位置、方位角和俯仰角如表1所示。则各基阵接收到的混响信号如图10所示。
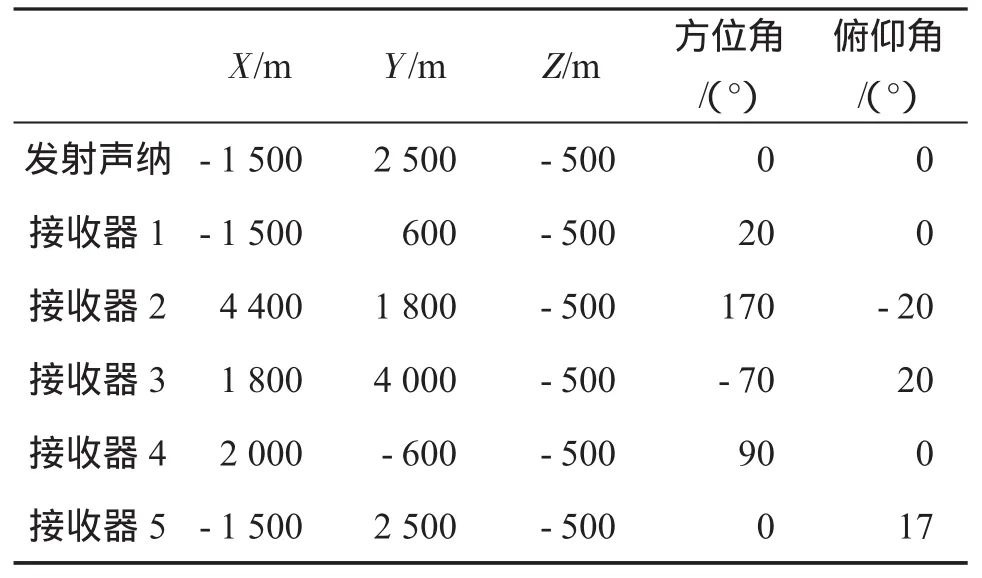
表1 发射声纳和接收器的位置、方位角和俯仰角表

图10 多接收模型接收信号
图中,接收1基阵和接收5基阵和发射基阵在同一侧,比较接近收分合置声纳,衰减规律比较明显,接收3基阵和接收4基阵在发射基阵的两侧,而接收2基阵在发射基阵对面。多接收模型的GUI图形用户界面如图11所示。
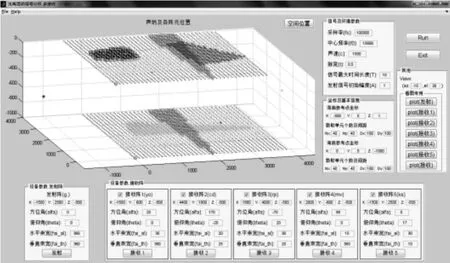
图11 多接收模型界面
界面中,包含各种参数的设定,有设备参数,信号参数等,并且有弹窗提示输入的参数正确与否,程序运行状态等。另外,界面菜单栏还提供数据和图像保存功能,界面制作相关信息等。
3 模型仿真结果统计特性的检验
3.1 多接收模型接收信号空间相关系数比较
把5个接收器设定在同一深度,均匀分布在圆上,并将发射器与接收器5设定为同一位置,如图12所示。这里研究不同俯仰角情况和不同束宽情况下,不同接收器模拟的信号与接收器5模拟的信号之间的空间相关性,如图13、图14所示。
多接收模型中,比较了不同位置上接收信号的空间相关系数。结果表明,接收器指向海底时,信号相关系数较大,指向海面时,相关系数较小,接收束宽增加时,相关系数变大。
3.2 模型仿真信号的统计特性研究
如图15所示,选取混响信号并截取较平稳的一小段作为研究对象,结果表明模型仿真的混响信号瞬时值服从高斯分布,振幅服从瑞利分布,相位在-π~π内均匀分布。
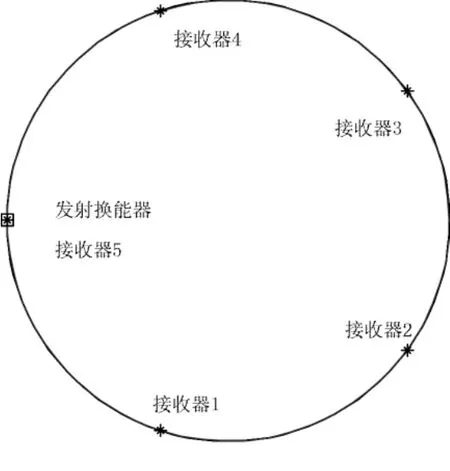
图12 发射器与接收器位置示意图
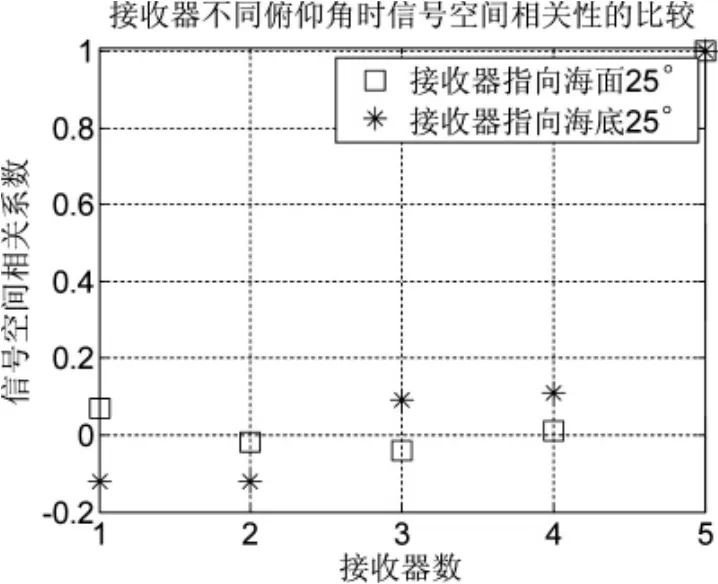
图13 不同俯仰角比较(发射无指向性)

图14 不同束宽比较(发射指向性一定)
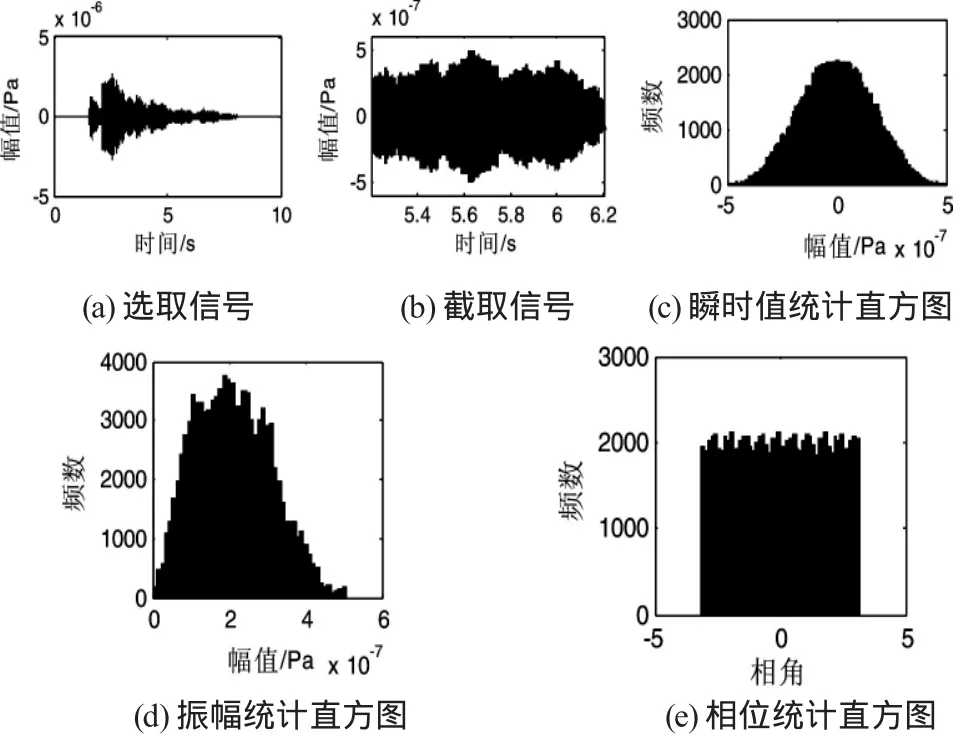
图15 统计直方图
4 结论
本文通过分析浅海混响产生的物理机理,根据单元散射模型理论,模拟海面波浪运动,海底不同粗糙程度对混响的影响,设备参数等,建立收发分置多接收声纳的浅海近程混响模型,并设计程序实现模型。对模型仿真结果统计特性进行检验,和文献[8]资料比较,混响的统计规律相吻合,验证了该模型是正确的。
[1]徐新盛,张燕,李海森,等.海底混响仿真技术研究[J].声学学报,1998,23(2):141-148.
[2]方世良,毛卫宁,陆佶人.海洋混响自相关函数的估计[J].东南大学学报,1995,25(4A):11-16.
[3]陈敏,徐利梅,黄大贵,等.基于MATLAB的换能器阵列指向性分析方法研究[J].电声技术,2006(5):25-28.
[4]郭熙业,苏绍,王跃科.运动声呐海底混响建模及仿真研究[J].国防科技大学学报,2009,31(5):92-96.
[5]崔晓东,黄建国,张群飞.主动声纳阵的混响仿真及检验[J].计算机仿真,2011,28(9):365-368.
[6]刘胜,常绪成.收发分置式声纳系统混响仿真方法[J].声学技术,2010,29(4):355-360.
[7]王新晓,黄建国,张群飞.海洋混响仿真技术研究[J].声学与电子工程,2002,3:27-30.
[8]BB奥里雪夫斯基.海洋混响的统计特性[M].北京:科学出版社,1977.
Modeling Study on Shallow Sea Short-range Reverberation Signal for Bistatic Sonar
HU Jia-fu1,ZHU Guang-ping1,ZHANG Wei-qiang1,2
(1.Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin Heilongjiang 150001,China;2.Ocean Hydrometeorology Institute,Navy Donghai-Armada,Ningbo Zhejiang 315122,China)
The modeling of bistatic sonar shallow sea short-range reverberation was studied mainly based on unit scattering theory.The sea and bottom scattering unit was divided according to the scattering coefficient correlation radius.Through simulating the formation physical process of the sea and bottom reverberation,models of single receiver and multiple receivers were established.Sonar equipment parameters and environmental factors were considered in the model.The programs for shallow sea short-range single receiving and multiple receiving reverberation signal model were designed and the GUI interface support was provided.Modeling and simulation of the reverberation signal statistical analysis shows that the establishment of bistatic sonar shallow sea short–range reverberation model is correct.
shallow water;reverberation;scattering unit;statistical characteristics
TB56
A
1003-2029(2012)02-0027-05
2011-12-19
朱广平(1980-),男,博士,讲师,主要研究方向为水声工程。Email:guangpingzhu@126.com