卫星贮箱故障时液体燃料运动特性仿真分析
2011-12-27曲广吉
黄 华 曲广吉
(中国空间技术研究院,北京 100094)
1 引言
卫星在空间轨道运行期间,贮箱内液体燃料处于微重力状态,液体主要受表面张力作用,其运动特性与常规重力条件下完全不同。为保证卫星上的发动机正常工作,国内外的相关专家多年来一直致力于液体燃料在轨管理技术的研究工作[1-3]。通过在贮箱内安装液体管理装置,利用表面张力的作用来控制液体燃料在贮箱内部的运动和定位,可为发动机的正常工作提供单相液体燃料。
推进系统的稳定运行是卫星在轨正常工作的基本保证条件,若由于贮箱内液体管理装置失效,气体进入到卫星的发动机,会导致发动机推力下降,影响卫星在轨姿态控制和位置保持,并最终影响卫星的在轨运行寿命,甚至可能直接导致卫星发生无法挽回的故障。
本文根据我国在轨运行的卫星液体燃料贮箱内液体管理装置的结构特点,对其可能出现的故障模式进行了分析,在假设液体管理装置出现故障的前提下,利用计算流体动力学数值仿真技术,仿真分析了卫星在姿态控制发动机工作时贮箱内液体燃料的运动特性,以及发动机关机后液体燃料的重定位过程,根据数值仿真结果,提出了出现上述故障后姿态控制发动机工作时应采取的策略。
2 故障模式分析
我国目前在轨运行的卫星很多采用半管理液体燃料贮箱,如图1所示,中间隔板将储箱分成上下两部分,同时将两部分的液体燃料隔离开。卫星在变轨阶段使用贮箱上部的液体燃料,在轨运行期间利用贮箱下部的液体燃料,来完成位置保持和姿态控制。卫星在轨运行期间处于失重状态,贮箱内安装有如图1所示的液体管理装置(PM D),液体燃料通过底部收集器(底收)、中部收集器(中收)、角部收集器(角收)以及液体管路进入到发动机中,同时收集器上表面安装有表面筛网,筛网的孔径非常小,可利用表面张力的作用有效阻止气体进入液体燃料管路。
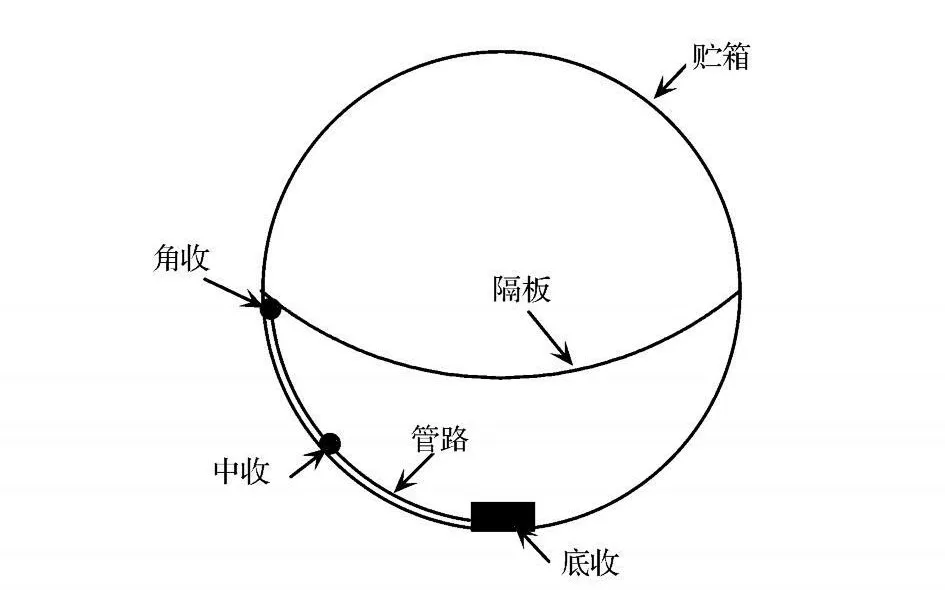
图1 液体燃料贮箱及液体管理装置示意图Fig.1 Sketches of liquid propellant tank and PMD
液体收集器是整个液体管理装置的关键部件,一旦收集器出现结构破坏并暴露在贮箱内的高压气体中,在发动机工作时就无法阻止气体进入到发动机管路。而气体进入发动机后,必然导致发动机推进效率下降,严重时甚至会导致故障。本文假设如图1所示的卫星液体燃料贮箱的底部收集器发生故障。在此前提假设下,为避免底部收集器在发动机工作时暴露在贮箱内的高压气体中,采用计算流体动力学数值仿真方法,分析发动机工作时贮箱内液体燃料的运动特性。
3 数值仿真方法
3.1 流体运动方程
对于卫星贮箱内的液体燃料,在数值仿真时可假设液体为恒温不可压牛顿流,密度为ρ,运动学黏性系数为μ。流体的运动方程为质量守恒方程及动量守恒方程,一般统称为Navier-S tokes 方程[4],即

其中,▽为拉普拉斯算子,t为时间,u为流体在计算坐标系内的速度矢量,p为流体的压强,f为流体在外力作用下的加速度矢量。
3.2 边界条件
在贮箱固体壁面处,采用黏性流体的壁面无滑移条件,即在固体壁面处流体的速度矢量u =0。
对于液体燃料与气体之间的自由液面,需要针对液体的速度和压强建立边界条件。沿自由液面的切向和法向的边界条件分别为[5]
其中,un和uτ分别为自由液面处的法向和切向速度,p为液体压强,p0为气体的环境压强,σ为表面张力系数,k为自由液面的平均曲率,τ和n分别为自由液面的切向矢量和法向矢量。
3.3 数值仿真软件
本文的数值仿真计算采用计算流体动力学(CFD)商用软件FLOW3D 完成,FLOW3D是一款成熟的两相流CFD 软件,利用著名的流体体积(Volume of Fluid,VOF)[6]法模拟计算液体与气体之间的界面,经常用于低重及微重条件下的液体晃动数值仿真计算[7-8],其仿真结果的正确性也早已得到了实验结果的验证[9]。FLOW3D 软件基于正交结构网格对流体运动的Navier-Stokes 方程进行空间离散,并利用有限差分法进行求解。
FLOW3D 软件提供了多种可供选择的流体运动方程求解选项,本文在具体进行仿真计算时,结合微重力条件下贮箱内液体运动的特点,考虑了流体粘性、表面张力等作用,采用层流模型并忽略液体的可压缩性。
3.4 数值方法验证
液体在表面张力作用下运动特性非常复杂,为保证本文数值仿真结果的正确性,首先与日本东京大学的落塔实验结果[10]进行对比。实验液体为乙醇,位于一透明的圆柱形容器中,容器的直径为150mm,高260mm,与实验容器安置在一起的照相设备记录自由液面在实验中的运动过程。落塔高约10m,为减小空气阻力的影响,使用两个下落箱体,液体容器和记录设备固定在内部箱体中,该落塔实验装置能提供10-3gn 的微重力实验环境。实验开始后大约0.9s,内部的箱体与外部箱体发生碰撞,然后一起自由下落直到落塔底部。图2(a)给出了实验不同时刻,记录下的容器内自由液面的形状,由图可见,自由落体运动开始后,在表面张力的作用下,自由液面由平面逐渐向曲面转变。同时在大约0.9s 后,两个箱体发生碰撞,自由液面形成了液柱,并随后在液柱内产生了气泡。
利用本文的数值仿真方法,对上述实验过程进行了模拟计算。在计算中考虑表面张力的作用,设定接触角为0°。图2(b)为计算得到的不同时刻自由液面的形状,与图2(b)的实验结果比较可见,数值仿真结果比较准确地再现了实验观测到的自由液面的运动过程。由此可见,本文的数值仿真方法能够仿真微重力环境下,表面张力占主导地位时的自由液面运动。
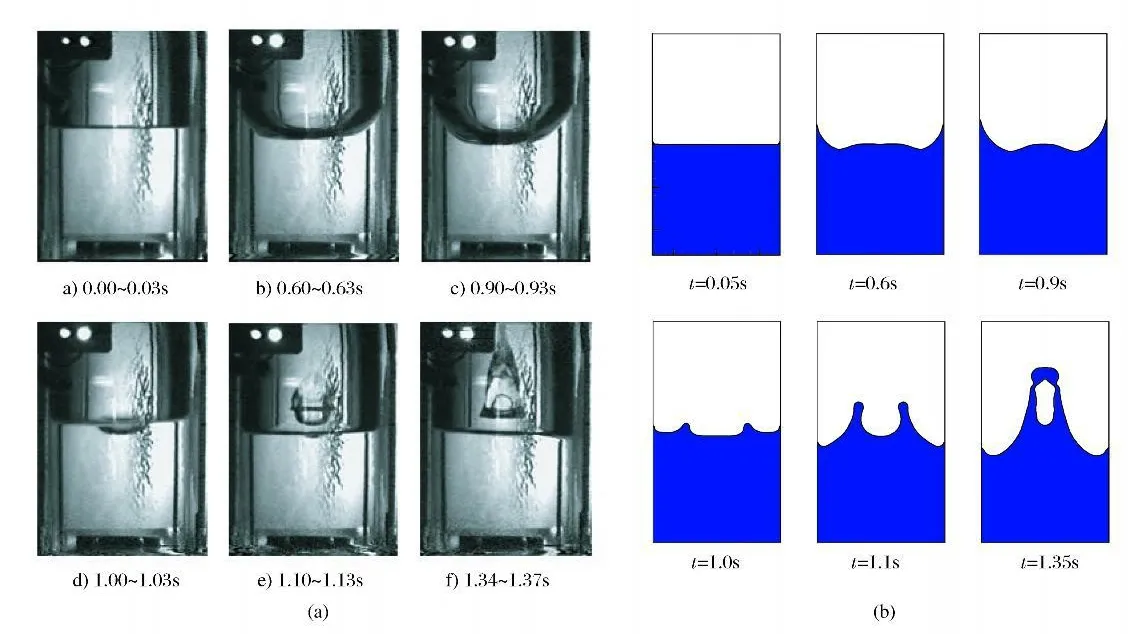
图2 不同时刻自由液面形状的实验与数值仿真结果比较Fig.2 Com parison of free surfaces at different time
4 结果与讨论
如前文所述,卫星在轨运行阶段液体燃料位于贮箱下半部分。在卫星寿命初期,贮箱内充液量较大,发动机开机工作时底部收集器一般不会暴露在贮箱内的高压气体中,因此本文的数值仿真主要针对卫星寿命中、末期,下部贮箱充液比较小的情况。考虑到计算量的关系,只选择充液比为40%这一典型工况进行计算分析。同时假设卫星贮箱为如图1所示的球形贮箱,半径为0.5m。
本文数值仿真时,液体燃料的密度取为874kg/m3,表面张力系数为3.39×10-2N/m,运动黏性系数为0.972×10-6m2/s。针对如图1所示的液体燃料贮箱的下半部分建立三维计算网格,网格数目约为100万(参见图3(a)所示的贮箱对称面的二维截面网格)。
4.1 初始平衡状态确定
一般情况下,卫星姿态控制发动机两次工作间会间隔较长的时间,同时卫星在轨运行时虽然受到各种干扰力的影响,但是都非常小,因此可认为在姿态控制发动机停止工作后,卫星处于完全的失重状态。为得到贮箱内液体燃料在失重工况下的分布情况,如图3(a)所示,先假设液体燃料完全位于贮箱底部,同时自由液面为平面(图中蓝色表示气体,红色表示液体,0.00~1.00为流体体积函数值),然后开始仿真计算,直到在表面张力作用下,贮箱内液体与气体的分布达到平衡状态。如图3(b)所示,600s后贮箱内液体与气体达到平衡状态。
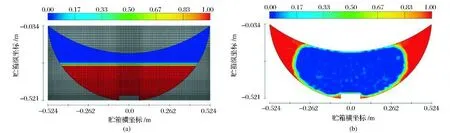
图3 失重工况下液体燃料的静平衡分布状态Fig.3 Equilibrium liquid propellant orientation in zero gravity environment
4.2 发动机工作时液体运动仿真
假设卫星两台姿态控制发动机同时工作,提供20N 推力,根据卫星液体贮箱的布局特点,不失一般性,可假设姿态控制发动机使卫星本体产生了如图4所示的沿贮箱横坐标正向的加速度。由上述的仿真结果可知,姿态控制发动机工作前,液体燃料处于失重工况下的静平衡状态(如图3(b))。发动机开机后,液体燃料在惯性力的作用下开始沿贮箱横坐标负向运动,图4给出了不同时刻贮箱内液体燃料分布位置的变化过程,图4中的t表示姿态控制发动机持续工作的时间。
对于本文选择的40%充液比这一工况,在静平衡状态下,底部收集器上部的液体燃料就已经只有很薄的一层(见图3(b)),在姿态控制发动机开机后的较短时间内,底部收集器上部的液体燃料仍然较少(见图4(a)、4(b)),不过底部收集器始终没有暴露出来,因此气体不会进入到发动机管路中。而在后续时刻,由于原本位于贮箱右侧的液体燃料沿壁面运动到贮箱左部,因此原本位于贮箱左侧的液体燃料被“挤”到贮箱中部(见图4(c)、4(d)),此时底部收集器上覆盖有大量液体燃料。直到发动机持续工作到20s时,底部收集器一直都没有暴露出来(见图4(e));而到21s时,如图4(f)所示,底部收集器上表面接近一半面积已经暴露在贮箱内的高压气体中,气体将有可能通过底部收集器进入到发动机液体燃料管路中,因此在本文所选择的工况下,卫星姿态控制发动机的持续工作时间不能超过20s。
4.3 液体燃料重定位过程仿真
卫星在轨工作时,有时需要沿同一方向的姿态控制发动机持续工作数分钟甚至更长的时间,而从上述的仿真结果来看,为避免气体进入发动机引发故障,姿态控制发动机最多只能持续工作20s。因此只能采取发动机间隔工作的模式,一方面保证工作的完成,另一方面避免气体进入发动机管路。而姿态控制发动机两次开机工作的间隔时间也需要通过数值仿真来确定。
假设发动机持续工作了21s,即当液体燃料分布状态如图4(f)所示时,发动机关机,卫星再次进入失重状态,液体燃料将在表面张力的作用下进行重定位,回复到如图3(b)所示的静平衡位置。为便于计算,本文在数值仿真时忽略发动机工作时液体燃料的消耗量,即假设贮箱内的充液比始终为40%。
图5给出了发动机关机后,液体燃料在表面张力作用下的运动过程,图中的时间t表示发动机关机后的持续时间。由图可见,发动机关机5min 后液体燃料在贮箱内的分布已接近静平衡状态(见图5(c)),而直到10min 后(见图5(d)),液体燃料的分布状态也只有细微的变化。因此遵循保守计算的原则,建议取发动机两次工作的间隔时间为10min。
5 结束语
本文假设卫星燃烧剂贮箱底部收集器发生故障,并针对下部贮箱充液比为40%这一典型工况,仿真计算了卫星在姿态控制发动机工作时液体燃料在贮箱内的运动特性,以及发动机关机后液体燃料的重定位过程。根据数值仿真结果,本文提出为避免贮箱内高压气体通过底部收集器进入到发动机,卫星姿态控制发动机的持续工作时间不能超过20s,而发动机两次工作之间应间隔10min 以上。
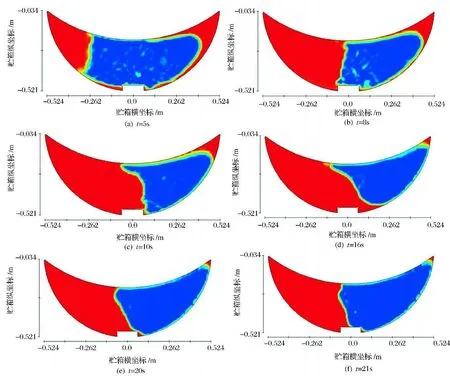
图4 姿态控制发动机工作时贮箱内液体运动变化过程Fig.4 Motion process of liquid propellant in tank during attitude control engines firing
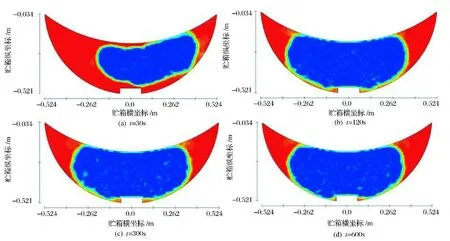
图5 发动机关机后贮箱内液体燃料重定位过程仿真结果Fig.5 Reorientation process of liquid propellant in tank after attitude cont rol engines burning off
本文在数值仿真时,忽略了如图1所示的贮箱内部管路等液体管理装置的影响,而在真实情况下,液体管理装置能对液体运动产生一定的阻尼作用,特别是内部管路还能起到导流作用,因此本文的计算结果是比较保守的。虽然本文只针对40%充液比这一种工况进行了仿真计算,但是本文的仿真方法适用于所有工况,因此其结果对其它充液比也有一定的参考意义。
References)
[1]Chato D J,M artin T A.Vented tank resupply experiment:flight test results[J].Journal of Spacecraft and Rockets,2006,43(5):1124-1130
[2]姚伟.在轨流体管理技术进展和关键技术分析[J].航天器工程,2008,17(3):89-94
[3]T ramel T L.NASA's cryogenic fluid management technology project[R].AIAA-2008-7622,2008
[4]Ibrahim R A.Liquid sloshing dynamics:theory and applications[M].New York:Combridge University Press,2005
[5]Veldman AE P,Gerrits J,Luppes R,et al.The numerical simulation of liquid sloshing on board spacecraf t[J].Journal of Computational Physics,2007,224:82-99
[6]Hirt C W,Nichols B D.Volume of fluid(VOF)method for the dynamics of f ree boundaries[J].Journal of Computational Physics,1981,39:201-225
[7]Grayson G D,Lopez A,Chandler F O.Cryogenic tank modeling for the Saturn AS-203 experiment[R].AIAA-2006-5258,2006
[8]Letourneur Y,Sicilian J.Propellant reorientation effects on the attitude of the main cryotechnic stage of ArianeV[R].AIAA-93-2081,1993
[9]Fisher M F,Schmidt G R,Martin J J.Analysis of cryogenic propellant behaviour in microgravity and low thrust environments[J].C ryogenics,1992,32(2):230-235
[10]Himeno T,Watanabe T,Konno A.Numerical analysis for propellant management in rocket tanks[J].Journal of Propulsion and Pow er,2005,21(1):76-86