嫦娥二号卫星CCD立体相机设计与验证
2011-12-27赵葆常杨建峰汶德胜常凌颖
赵葆常 杨建峰 汶德胜 高 伟 常凌颖,2 薛 彬
(1 中国科学院西安光学精密机械研究所,西安 710119)
(2 中国科学院研究生院,北京 100049)
1 引言
嫦娥一号卫星的CCD立体相机,采用了广角、远心、消畸变的光学系统,配以一块1 024×1 024 元的面阵CCD 作为图像遥感器,取其第1 行、第512行及1 024 行作为前视、正视与后视遥感器[1];该相机在轨无故障运行1年4个月,已获取了目前国际上覆盖最完整、质量最好的全月面立体影像图[1-2]。但是它的地元分辨率在200km 圆轨道上仅为120m,所以只能发现较大尺寸的目标,若以月坑直径为例,则它只能发现直径大于360m 的月坑,为了向月球科学家提供更高分辨率的三维影像,并为嫦娥三号着陆器和月球车提供虹湾地区着陆点附近详细的地形地貌数据,嫦娥二号卫星CCD立体相机大幅度提高了地元分辨率。
根据任务要求,嫦娥二号卫星CCD立体相机应满足在两种轨道上实现立体成像:一是具有在100km 的圆轨道上实现地元分辨率优于10m 的全月成像能力,二是具有在100km/15km 椭圆轨道近月弧段上获取地元分辨率优于1.5m 的局域立体成像能力;前者将为月球科学家提供更为精细的全月三维地形地貌图,以便对月球进行更详细的地质学研究,后者主要为嫦娥三号月球探测任务服务。
2 总体方案及系统参数计算
卫星总体与中科院探月工程总体部下达的嫦娥二号卫星CCD立体相机的主要技术指标如表1所示。
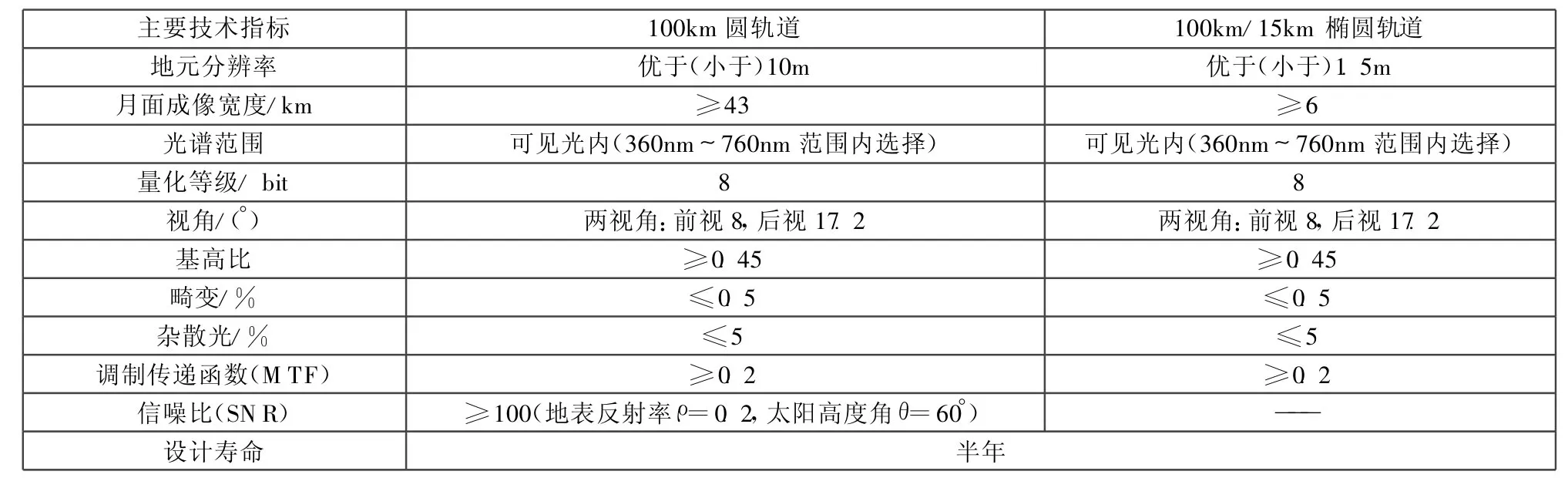
表1 嫦娥2 号卫星CCD立体相机主要技术指标Table1 Main technical parameters of CCD stereo camera of Chang' e-2 lunar orbiter
无论是在100km 的圆轨道上实现地元分辨率优于10m 的全月成像时对极区低反射目标的立体成像,还是对100km/15km 椭圆轨道近月弧段上获取地元分辨率优于1.5m 的虹湾地区立体成像(虹湾地区中心位于北纬44.1°,反射率在0.05~0.1 之间,是低反射区),由于地元分辨率高,允许的最长曝光时间短,所以CCD立体相机的探测灵敏度是首先必须解决的技术问题。参照嫦娥一号卫星CCD立体相机在轨获取全月图像时的各项参数及相应的实际图像的灰度值[1-2],认为从保证CCD立体相机的探测灵敏度出发,拟采用高灵敏度的时间延迟积分CCD(称为TDI-CCD)作为图像遥感器是一种科学合理的选择[3-5],采用TDI-CCD 还可以大大简化光机系统,且研究所内已有符合要求的TDI-CCD 器件。
2.1 光学系统焦距计算
TDI-CCD 器件的像元数N为6 144,积分级数为16、32、48、64、96级共5 档,它们的曝光时间之比为1 ∶2 ∶3 ∶4 ∶6。因为在100km 圆轨道时,在赤道上相邻轨距约为32km,从轨道间拼接要求出发,要求100km 圆轨时月面刈幅宽度L 大于等于43km ,以43km 计,立刻可以计算出采用单片TDICCD(有效像元数为6 144 元)最高可能的地元分辨率
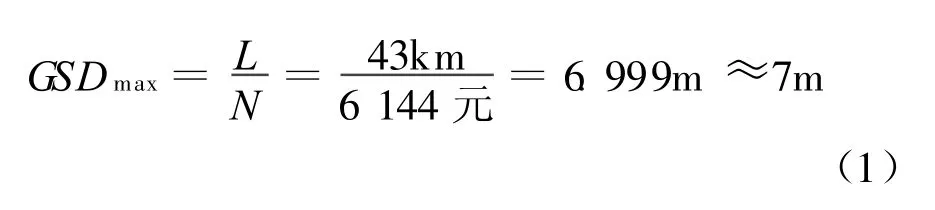
因为任务要求地元分辨率优于(小于)10m,所以用单片TDI-CCD 已能满足要求。根据CCD 像元尺寸dx为10.1μm ×10.1μm ,在轨道高度为H =100km时,立刻可以求出光学系统的焦距f′为

式中,H为轨道高度、GSD为地元分辨率,dx为CCD 像元尺寸,f′为光学系统焦距,则

由于100km/15km 椭圆轨道近月弧段的摄影高度比100km 圆轨道降低了85km ,所以立刻可以估算出它的地元分辨率应为1.05m,同样符合任务要求的优于1.5m 的指标。
2.2 焦平面配置与系统视场角
嫦娥一号卫星中的CCD,每个视角(每行)为500个像元,三行共1 500个像元,而且行频仅为12行/s,数据率为0.144M bit/s,而嫦娥二号的CCD一个视角(一行)数据率就达10.91 M bit/s,如果采用与嫦娥一号相同的三线阵焦平面方案,则总数据率达32.73 Mbit/s,给数据下传带来巨大的压力。为此采用了双线阵CCD 相机的立体配置方案[6],在这种条件下数据量仍达21.82M bit/s,为嫦娥一号总数据率的151.3倍,因此必须采取数据压缩技术才能满足数传的要求。
从获取立体图像来说,两线阵就可满足要求,它将从CCD 相机像方获得4个已知量x前、y前及x后、y 后,用最小二乘法求解月面目标点的三个坐标值x、y、z[7]。但是因为通常光学系统视场中心部分的像质总会优于视场边缘,所以从保证正射图像(星下点)的质量出发,总希望在视场中心部分配置一条正视遥感器,但当方案被限制在只用两个视角时,这种配置的基高比较小。经平衡折衷后,嫦娥二号中两条线阵CCD 的配置为前视8°及后视-17.2°,前视8°照顾了正射图像,这时的基高比值可达0.45。
对CCD立体相机,焦平面配置一旦确定,就可以立刻计算出系统的总视场角。图1中,O 点为光轴中心点,后视17.2°的CCD 中心点B到O 点距离OB =f′·tan17.2°=44.67mm,而B A=(6 144 ×0.010 1)/2=31.027mm。立刻可以求出像方的最大线视场OA=54.4mm,在半径方向再留约1mm的设计、加工与装配余量,确定像方线视场为φ110.78mm,相对应的视场角(2ωUP)为42°。
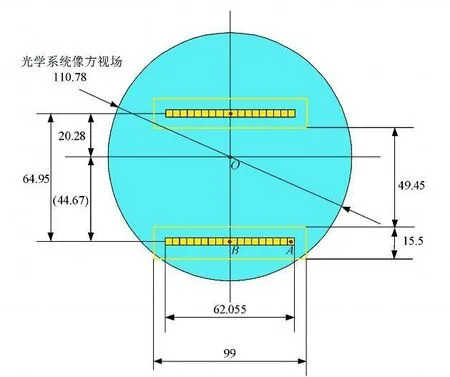
图1 焦平面配置图(单位mm)Fig.1 Schematic diagram of focus plane(mm)
2.3 相对孔径的考虑
通常相对孔径的考虑基于如下两个方面:系统能量与衍射极限。由于采用了TDI-CCD,系统能量是足够的,因此在嫦娥二号卫星CCD立体相机相对孔径的考虑中主要是衍射极限,同时对航天产品还应适当考虑相机的重量与尺寸。经初步预估对50 lp/mm 的奈奎斯特(Nyquist)空间频率(它对应CCD 像元尺寸为10.1m ×10.1m),当相对孔径取F/9时,衍射调制传递函数(MTF)约为0.7,按设计经验评估,认为对这样一个系统,在像差校正上可以做到接近衍射极限。
从上面计算,认为嫦娥二号卫星CCD立体相机的光学系统参数为:
1)焦距f′=144.3mm
2)相对孔径F/数=F/9
3)视场角2ωUP=42°
4)基高比为0.45
5)成像模式为双线阵CCD立体成像
上述光学系统在100km 圆轨道与100km/15km 椭圆轨道上可达到的技术指标如表2所示,它满足了卫星总体下达的技术指标。图2为该相机的推扫示意图。
2.4 光谱范围选择
与嫦娥一号卫星CCD立体相机相比,嫦娥二号的立体相机焦距增大6.2倍,视场角从36°提高到42°,要求的奈奎斯特空间频率从41 lp/mm 提高到50 lp/mm ,显然设计难度大幅提高,从保证图像质量的要求出发,我们的设计目标是整机全视场发射前的检测MTF 仍大于0.4,但是在通常的情况下它是无法达到的。
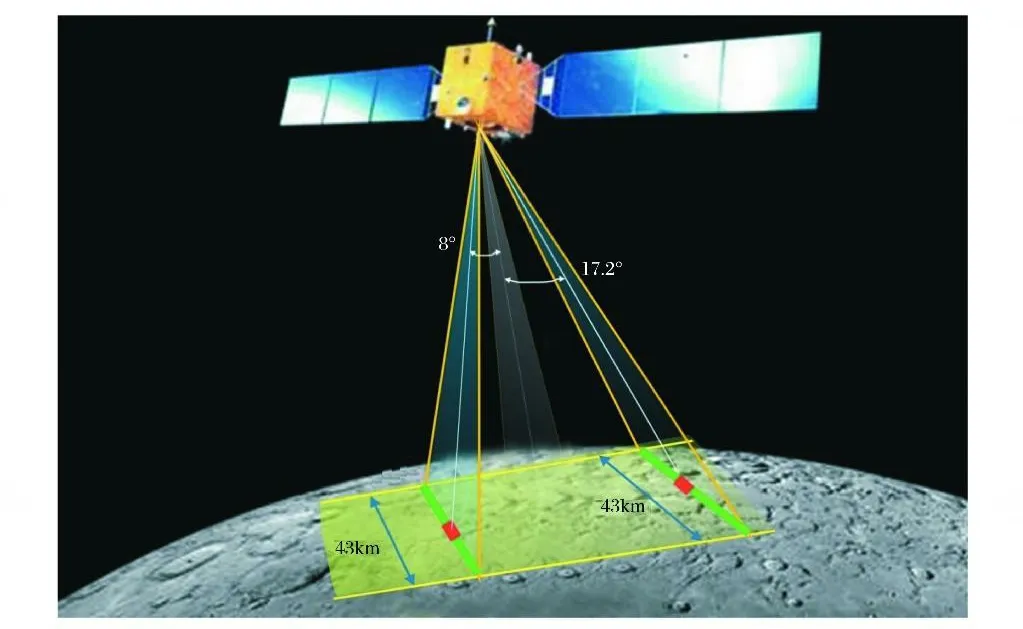
图2 嫦娥二号卫星有效载荷CCD立体相机推扫示意图Fig.2 Schematic diagram of Chang'e-2 lunar orbiter CCD stereo camera
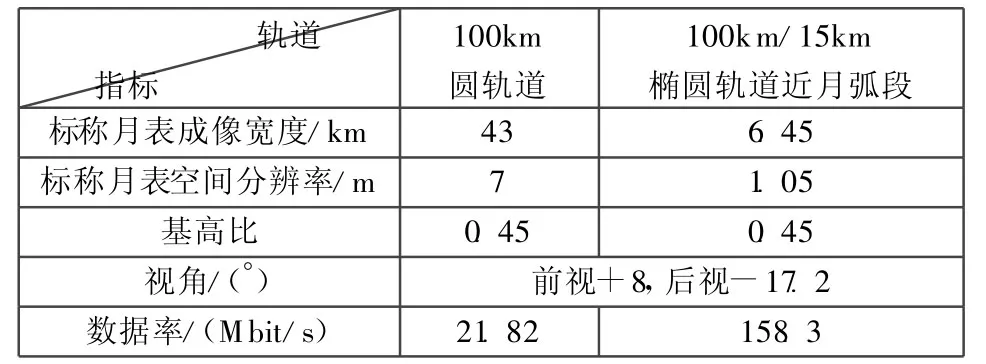
表2 嫦娥二号卫星CCD立体相机技术参数设计值Table2 Design technical parameters of CCD stereo camera
为此,我们研究了TDI-CCD 器件的对比传递函数(CTF)特性。
厂家给出的CTF(λ)曲线,是以矩形鉴别率条纹的测试数据,它与MTF 间的关系为CTF。图3 中纵坐标为CTF值(MTF),横坐标为波长,从图可以看出CTF 对波长有重大的依赖关系,在波长为450nm~520nm 间,器件的CTF 非常高,接近0.9,换算为MTF 后接近0.7,而随着波长的增长,CTF 快速下降,在λ=1μm时,CTF 仅为0.3。因此我们选择450nm~520nm 作为CCD立体相机的工作波段,从光学系统来考虑,也是波长越短,衍射MTF值越高。同时月表对太阳光在360nm~760nm 的可见光波段内并无波长选择性特征,是一条随波长增大而反射率略有增大的斜直线。因此对应用目标没有影响。
从光学系统与CCD 探测器这两个对MTF 影响最大的环节来评估,认为整机静态MTF 大于0.4是可能的。
3 光学系统设计
3.1 设计参数
1)f′=144.3mm
2)F/数=F/9
3)2ωUP=42°
4)λ=450nm~520nm
5)MTF >0.6(50 lp/mm ,设计值)
6)畸变≤0.5%
3.2 光学系统结构形式的选择
在结构形式的选择上,重点考察了远心与非远心两种情况。
若系统设计为远心系统,这时对光学设计的要求除满足3.1 的条件外,增加了一个像方远心条件,这样的系统从设计及研制上是可实现的,但从系统像方线视场为φ110.78mm 来判断,这时在像面附近处的透镜尺寸一定超过φ110.78mm,从而使系统的重量、体积大幅度增加,而且对航天环境适应性也不利,为此,放弃远心的要求。利用6 144 元的CCD分为12个通道的特性,通过电子学手段调整各通道的增益从而改善电子图像输出的均匀性是一种合理的选择。
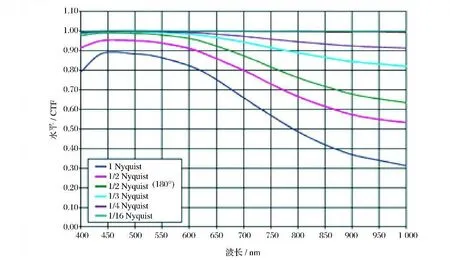
图3 TDI-CCD 的CTF 曲线Fig.3 CTF curve of TDI-CCD
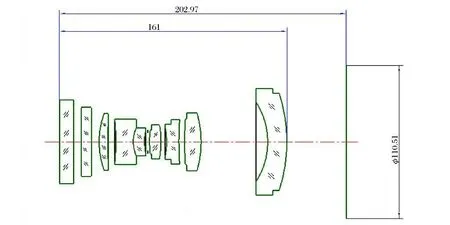
图4 嫦娥二号卫星CCD立体相机光学系统结构图(单位mm)Fig.4 Structure diagram of Chang'e-2 lunar orbiter CCD stereo camera optical system(mm)
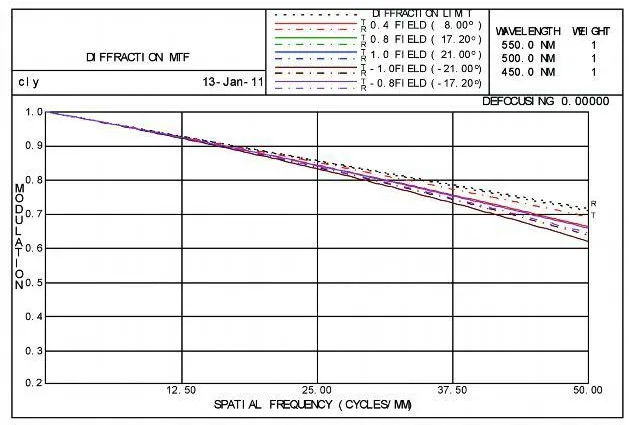
图5 调制传递函数MTF曲线(计算机仿真图)Fig.5 MTF of optical system(by computer simulation)
3.3 光学系统设计结果
系统最前方为融石英窗口玻璃,对月面不镀膜,后方为滤光片,滤光片后面的光学系统为6 组7 片型,系统总长202.97mm,光学筒长为161mm,最大直径为最后一块透镜,尺寸为φ79mm(其中通光口径为φ68.8mm),系统无渐晕。光学系统设计结构如图4所示,白光的设计MTF 曲线如图5所示。
如表3所示,轴上点MTF值达到衍射极限(0.71),对前视8°~14.4°MTF 均值为0.68,比衍射极限低0.03,后视17.2°~21°,MTF 均值为0.663,比衍射极限低0.047,说明全视场MTF 接近衍射极限,是一个理想的设计。
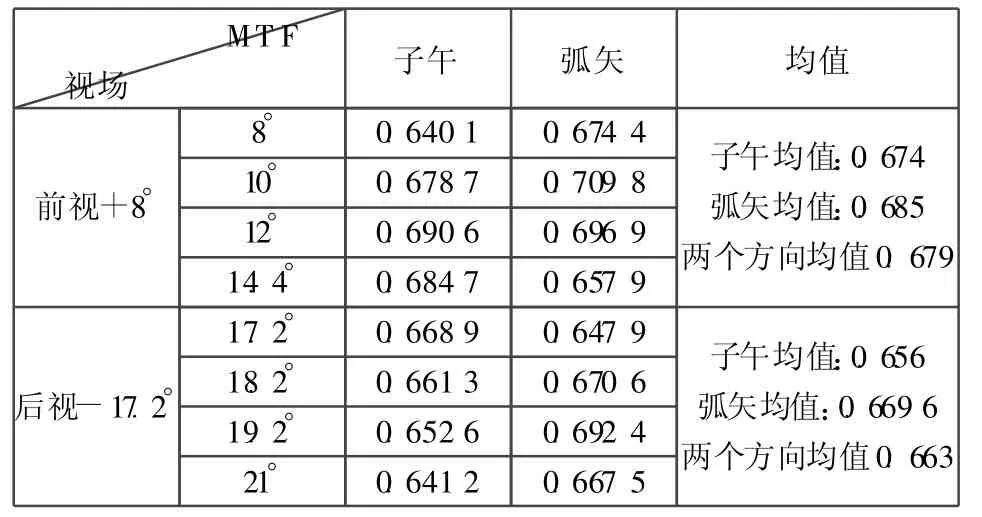
表3 前、后视的MTF值Table3 MTF of foresight and back sight
图6所示是在像面上的弥散斑,全视场弥散斑直径的均方值小于 7μm (一个像元尺寸为10.1μm),最大弥散除视场角21°外也均在一个像元尺寸之内,结果与MTF 相符,畸变为±0.1%。
对100km/15km 椭圆轨道近月弧段的成像,MTF 及弥散斑尺寸同100km 圆轨道的情况。
4 检测与地面试验
4.1 检测
对初样鉴定级产品与正样产品进行了严格的检测,两者相差极小,都达到了研制任务书的各项技术指标,正样产品的检测结果如表4所示。
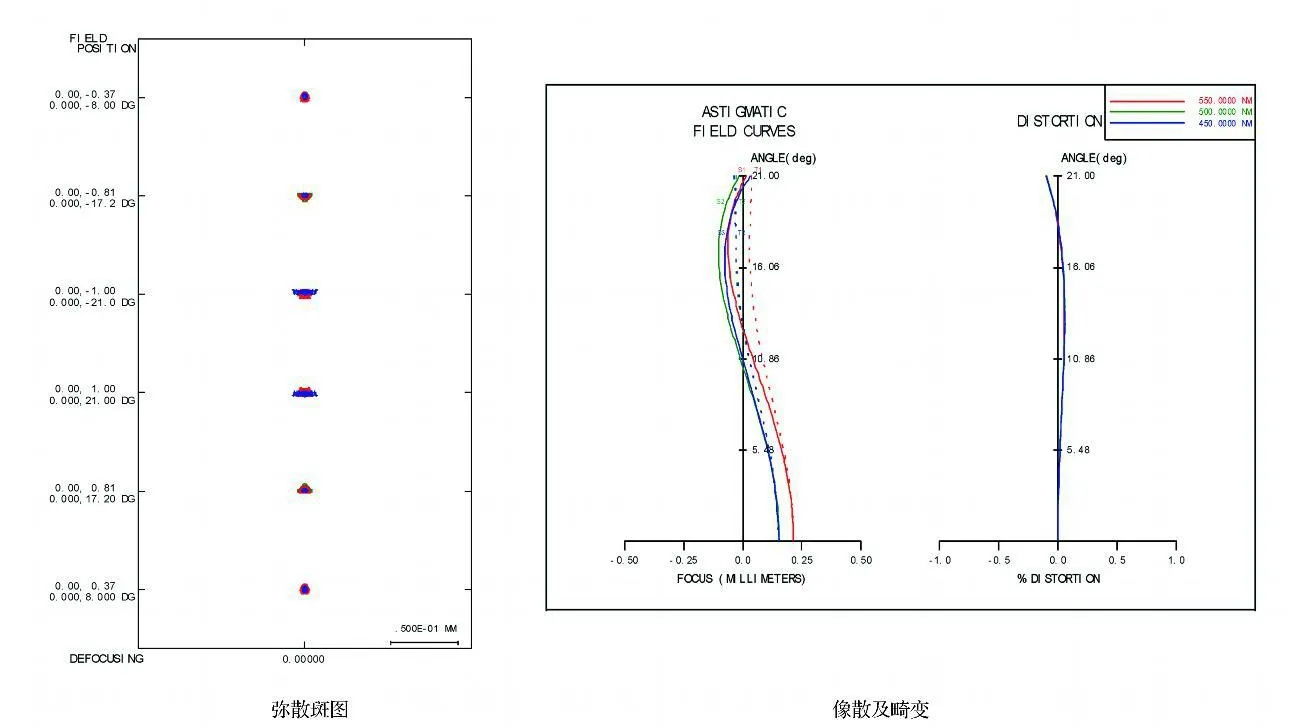
图6 光学系统弥散斑及像散、畸变图(计算机仿真图)Fig.6 Spot astigmatic and distortion curve of optical system(by computer simulation)
4.2 速高比补偿与地面推扫成像试验
由于嫦娥二号卫星CCD立体相机采用了高探测灵敏度的时间延时积分TDI-CCD,但TDI-CCD要求进行速高比补偿,否则它会降低沿飞行方向的MTF(子午方向)[8-9],对月球探测采用TDI-CCD 以及由此带来的速高比补偿在国内外均属首次。
与地球卫星采用TDI-CCD,并进行速高比补偿相比,在月球探测中进行速高比补偿在技术上要困难得多,这是由于探月卫星轨道高度低,月球地形起伏大,无精确的月面高程数据,无GPS 定位系统支持等因素所致[10]。
对速高比补偿的残差连同卫星平台的姿态稳定度因素,造成沿飞行方向上的MTF 最大下降以不超过50%为判据,这是基于相机实际达到的MTF在0.4 以上,即便由于速高比补偿残差与卫星平面姿态稳定度导致它下降一半,在轨沿飞行方向的MTF 仍大于要求的0.2。据此计算了不同TDICCD级数下允许的速高比失配允差,如表5所示,图7所示是地面推扫成像试验验证,表明在上述条件下,图像质量没有明显下降。此外还在实验室内进行了定量检测,结果与理论分析一致。

表4 主要性能指标检测结果Table4 Test results of main performance parameters
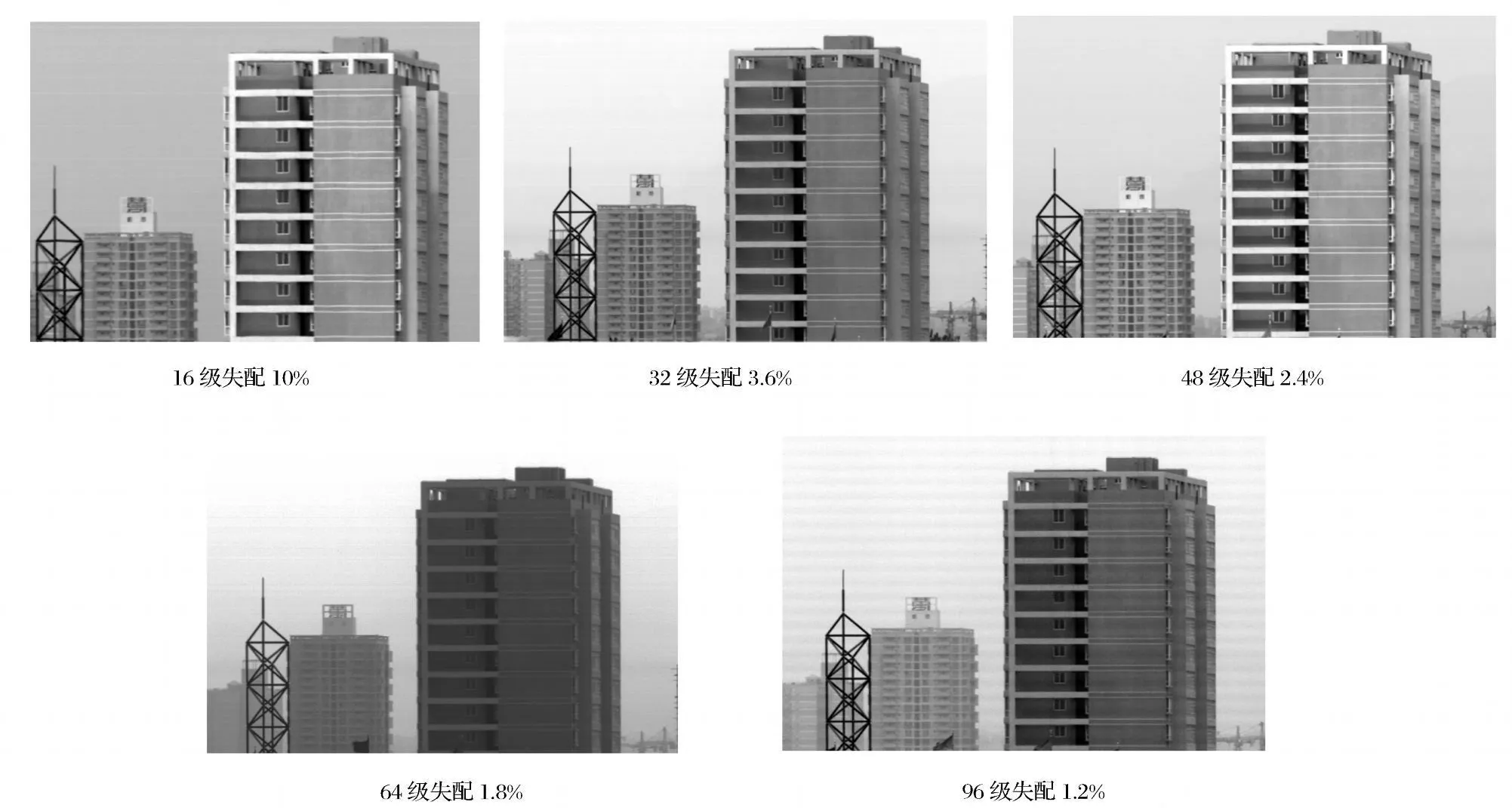
图7 速高比有残差时的外景推扫图像Fig.7 Exteriors push broom image with residual velocity-height ratio
5 结束语
由中国科学院西安光学精密机械研究所研制的嫦娥二号卫星CCD立体相机,能同时满足如下两种轨道的成像要求:在100km 极轨圆轨道上,具有实现地元分辨率为7m 的全月立体成像能力。在100km/15km 椭圆轨道近月弧段上具有实现在嫦娥三号预选着陆区虹湾地区的1m 地元分辨率的超高空间分辨率的局域立体成像能力。

表5 速高比补偿残差允限Table5 Allowable residual velocity-heigh ratio
对100km 轨道的成像,单条CCD 允许的最大曝光时间为4.5ms,对100km/15km 椭圆轨道单条CCD 允许的最大曝光时间为0.6ms,但由于卫星的高度较低(15km),所以轨道高度误差对曝光时间与地元分辨率的影响较为显著,按研制任务书规定,100km/15km 椭圆轨道允许轨道高度变化±5km,即15km ±5km ,所以其地元分辨率应在0.7m~1.4m 之间。相应的单条CCD 曝光时间为0.4~0.8ms。
References)
[1]赵葆常,杨建峰,汶德胜,等.嫦娥一号卫星CCD立体相机的设计与在轨运行[J].航天器工程,2009,18(1):30-36
[2]赵葆常,杨建峰,贺应红,等.探月光学[J].光子学报,2009,38(3):461-466
[3]Hebben T ,Bergstrom J,Spuhler P,et al.Mission to M ars:the H IRISE camera on-board M RO[R].Proc of SPIE,vol.6990,66900b-1~66900b-22,2007
[4]韩昌元.近代高分辨率地球成像商业卫星[J].中国光学与应用光学,2010(3):201-208
[5]周胜利.三线阵TDI-CCD 在测图卫星中的应用分析[J].航天器工程,2007,16(4):19-22
[6]Tsuneo Matsunaga,Makiko Ohtake,Yasuhiro Hirahara,et al.Development of a visible and near infrared spectrometer for selenological and engineering explorer(SELENE)[R].Proc of SPIE Vol 4151,2001:32-39
[7]李德仁,郑肇葆.解析摄影测量学[M].北京:测绘出版社,1992:6-75
[8]樊超,李英才,易红伟.速高比对TDI-CCD 相机成像质量的研究[J].兵工学报,2007,28(7):817-821
[9]许兆林,孙所义.提高TDI-CCD 相机成像质量的研究[J].航空计测技术,2002,22(3):9-12
[10]季善样,朱文辉,熊永清.星载GPS 精密测轨研究及应用[J].天文学进展,2000,18(1):17-28