日间恒星实时探测的视频图像处理
2011-11-06冯小勇赵忠华刘新明
冯小勇,赵忠华,刘新明
(1.中国卫星海上测控部,江苏江阴214431;2.上海交通大学仪器科学与工程系,上海200240)
1 引言
在航天测量船上,导航设备是船载测控设备进行海上测控的精度基准,而惯性导航设备输出的航向、位置、姿态等信息存在漂移误差,这些误差直接影响着船载测控设备对航天器的外测定轨精度。为了能够全天时地对惯导设备漂移误差进行检测和校准,需要利用光学设备实现昼夜测星。而且单次观测恒星的数量要在12颗以上,才能保证惯导误差校准的精度指标。日间测星需要在明亮的天空背景中识别并提取弱小的恒星目标,影响其观测效果(星等、星数)的关键因素包括:光学系统结构设计和视频图像处理算法设计[1-2],本文主要讨论日间测星图像处理算法设计。
国内外学者对弱小目标电视探测进行了大量有益的探索,已经提出了许多有意义的视频图像处理算法,如:频域中的三维时空匹配滤波技术、迭代统计平均检测法、HOPFIELD神经网络法、全局搜索法等[3-6],但专门针对日间恒星实时探测(采样频率≥20 Hz)的研究并不多,特别是在实际工程中取得良好应用效果的就更少。理论分析表明:在晴朗且能见度良好的日间天空,约50%的天空的亮度大于3.0星等的恒星亮度;而海上实际测星实验表明:星等大于1.0等的恒星几乎全被天空背景淹没,实际满足对比度要求的可供观测的恒星数量是非常有限的。
为了解决现有光测设备日间测星数量偏少的问题,本文进一步研究了暗小目标电视探测技术,提出了新的视频图像处理算法,给出了采用新算法得到的实验结果。
2 日间测星观测系统
日间测星需要在明亮的天空背景中识别提取弱小的恒星目标,信息处理的主要任务是改善输入图像质量,提高恒星目标与天空背景对比度,解决低信噪比情况下的目标检测问题,从而提高日间测星的探测能力和观测数量,满足惯导误差校准的实际需要(测星数量≥12颗)[7-8]。
日间测星电视跟踪测量系统组成原理框图如图1所示。

图1 日间测星电视跟踪测量系统组成原理框图Fig.1 Principle block diagram of TV tracking measurement system for measuring stars in daytime
探测系统硬件组成包括:光学系统、可见光电视探测器、电视信息处理电路等。为了提高目标与背景的对比度,依据恒星目标与天空背景光谱的不同,在光路中设置了多级光谱滤光装置。
目标和背景经光学系统和光谱滤光成像在光电探测器件靶面,光电探测器件把光学图像转换为视频信号,图像处理器接收来自光电探测器件的视频信号,通过实时视频图像处理(≥20 Hz),给出目标偏离视轴中心的误差。
图像处理功能模块包括:视频信号预处理模块、高速模数变换模块、现场可编程门阵列(FPGA)数字处理模块、数字图像存储器模块、数字信号处理(DSP)分析模块、数据通讯接口模块、同步和叠加显示模块等。
3 实时图像处理算法
图像处理是解决低信噪比图像目标检测与跟踪的关键。本文在采用中值滤波法进一步提高信噪比的同时,重点采用了基于模糊理论的最大模糊熵阈值分割方法,自行构建了隶属度函数自适应求取阈值,实现了快速稳定的目标识别与跟踪[9-12]。
3.1 图像预处理—中值滤波法
针对日间海上测星工作的实况,在参考相关文献和试验研究的基础上,本文采用实时性好的中值滤波技术来滤除杂波干扰,以改善视频图像的信噪比,提高对目标的探测能力和跟踪的稳定性。信噪比计算方法为:

式中:fT为可检测出的点目标最大灰度值,μ为图像灰度均值,δT为图像灰度的标准差。μ的计算公式如下:

式中:L为图像的灰度级,xk为图像的灰度值,nk为图像中灰度值为xk的像素的个数,nL为图像中像素的个数。δT的计算公式如下:

中值滤波实验图像处理结果显示:原始图像的信噪比为6.33,中值滤波后的信噪比为7.18。
应用中值滤波对某大型光电望远镜电视系统拍摄的4.5等星原始视频图像采用3×3窗口滤波,图像处理效果如图2所示。

图2 中值滤波实验图像处理效果Fig.2 Image process effect of median filter experiment
由此可见,中值滤波方法具有处理效果好、算法简单、实时性好等优点。
3.2 图像分割—模糊阈值法
在视频图像处理分析中,通过设置恰当的阈值,把目标从背景分离出来是一种广泛应用的数字图像处理方法。灰度阈值分割法即设定门限值把多灰度图像分割成两个或多个集合,不同集合代表不同意义的区域。为了使分割后的图像最贴切地反映原始图像,阈值的选取至关重要。
针对日间强背景下空间弱小目标图像对比度低的特点,本文在大量文献和实验研究的基础上,采用了基于模糊理论的最大模糊熵阈值法,通过测量图像的模糊度来确定阈值,并改进了已有的隶属函数数学模型,不仅减少了计算量,而且提高了处理效果。
3.2.1 基本原理
在图像分割处理中,阈值选取的合理性及最优性是不完全确定的,因此,可以应用模糊集理论求取阈值。为此,首先必须给出描述图像某一特性的模糊集合:设一幅图像有L个灰度级,用Ω={r0,r1,…,rL-1}表示。就不同的阈值而言,某一图像的灰度级属于亮的集合还是暗的集合是一个模糊概念。根据模糊理论,通过构造隶属函数μ(ri)(i=0,1,…,L-1),把 Ω 映射到[0,1]之间来确定一个模糊子集A,它描述了原灰度级集合中各灰度级从属于该模糊子集的程度。当设定某一阈值以后,根据隶属函数就可以得到每个灰度级属于亮或暗的程度(也称为隶属度)。模糊子集A可表示为:

A的概率如下:

这里

式中:h(ri)表示图像的灰度直方统计图,M×N表示一幅图像的像素数量。随着选取阈值的不同,可以得到不同的模糊子集。设U={A1,A2,…,Ak}表示模糊子集的一个有限分割,依据信息论的知识,熵可以写成如下形式:

根据最大熵原则,当熵值最大时对应的分割点即为理想分割点。
3.2.2 隶属函数的构造方法
由于设计算法的目的主要是实现对低对比度图像的分割。这类图像的共同特点是整幅图像的信息主要集中在一个狭窄的灰度带上,背景和目标主要集中在两个不同的灰度级上,也就是说通过模糊阈值法找到一个阈值,使用这个阈值进行划分能得到一个区域的正确划分,也就能得到另一个区域的正确划分。
这里采用了已有的降半梯形分布模型,重新构造了一个隶属函数,如图3所示。

图3 呈降半梯形分布的隶属函数Fig.3 Dependency function
把一幅图像的各个灰度级属于暗区域的程度看作一个模糊子集合,图中随着灰度级的增高,属于暗区域的程度逐渐降低,w的值决定该隶属函数的形状,即决定各灰度级从属于暗区域的程度。当以该模糊集合为参数,通过最大熵原则就可找到一个理想的阈值。
在图3中,斜线部分可写成如下形式:

整理得到:

式中:2w等于所采集图像的最大灰度级与最小灰度级之差。整个隶属函数可表示为:

3.2.3 算法实验
为了检验模糊阈值法的实际处理效果,采用某光电设备对日间强背景下空间弱小目标低对比度图像进行了仿真实验,同时给出了求最小模糊度法、类间方差法、H.D.CHENG法、模糊阈值法的实验结果,如表1所示。

表1 4种算法的最优阈值及搜索次数Tab.1 Comparison of four arithmetics about optimal thresholds and search numbers
由表可以看出,CHENG的方法所用的搜索次数最多,而类间方差和求最小模糊度法所用搜索次数相同,模糊阈值法搜索次数最少。此外,在实际搜索过程中,类间方差和求最小模糊度法还含有其它大量计算。自适应模糊阈值法实际处理效果如图4所示。
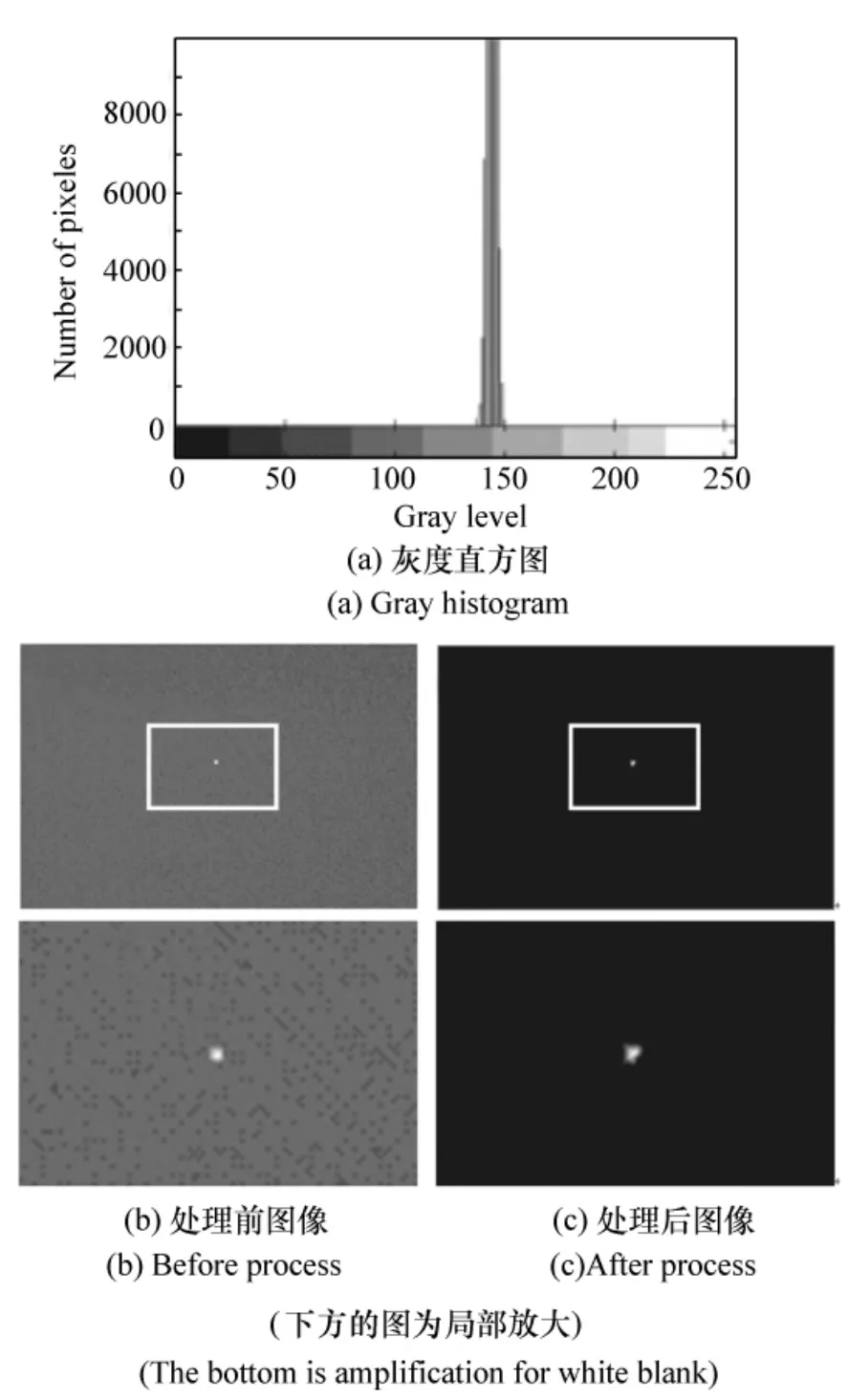
图4 自适应模糊阈值法实际处理效果Fig.4 Real process effect in adaptive maximum-fuzzyentropy
可以看出,自适应模糊阈值方法在对低对比度图像的阈值分割中效果很明显,由此说明用自适应模糊阈值方法对日间强背景下空间弱小目标低对比度图像进行阈值分割,无论是在计算效率上,还是在处理效果上都具有优越性。
4 日间测星实验情况
本文在10多年日间测星工程应用实践经验的基础上,依据恒星的亮度特性、光谱特性、所用观测设备的性能参数,优选比较适合在日间观测的256颗恒星(星等:≤4.5等;光谱:M,K,G,F,A,B,O)并建立了日间星库,由主控微机引导观测设备自动测星。
日间测星观测实验所用设备为船载光电经纬仪,为便于比较极限观测星等,在电视跟踪测量系统改造前后分别进行了多次重复观测实验。需要说明的是:每次实验并没必要对所有256颗星体进行观测,只要选择星库最难观测的部分星体(如亮度最小、波长较短等)进行实验即可。日间测星实验结果如表2所示。

表2 日间测星实验结果Tab.2 Results of measuring star experiment in daytime
衡量日间测星能力最重要的两个指标是极限探测星等和能够观测星数,它们是多次观测实验的综合数据,在天气良好的情况下,观测实验结果非常稳定。由此看出:日间可以探测的恒星数量由以前的小于等于5颗,提高到现在的大于等于250颗,日间可以探测的恒星星等由以前的大于等于3.0星等,提高到现在的大于等于4.5星等。
5 结论
本文对日间测量星及相关的图像处理进行了研究,日间测星实践表明:采用图像滤波和模糊阈值相结合的“暗小目标稳定识别跟踪算法”是有效的。它提高了对日间暗小恒星目标的探测能力,日间可探测的恒星由大于等于3.0星等、小于等于5颗,提高到了大于等于4.5星等、大于等于颗,满足了惯导误差精确校准的实际需要(测星数量大于等于12颗)。
实验结果表明,日间可以探测的最高星等虽然达到了和夜晚测星基本相同的能力,但日间实际能够观测的星体数量还是少于夜间,因此这将是今后进一步深入研究的课题。另外,基于日间恒星探测的相关技术方法,对天文观测、空间目标监视、深空探测等相关领域具有参考价值。
[1] 王伟国.空间目标白天光电探测技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2005.WANG W G.Research of space object setecting under bright background[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2005.(in Chinese)
[2] 沈湘衡,李清军,王建军.利用视频判读进行白天测星方法的研究[J].光学 精密工程,2000,8(2):189-191.SHEN X H,LI Q J,WANG J J.Measuring star with video interpretation in daytime[J].Opt.Precision Eng.,2000,8(2):189-191.(in Chinese)
[3] 冯晓勇,朱伟康.光测设备天文标校误差解算分离算法[J].光电工程,2008,35(12):28-33.FENG X Y,ZHU W K.Single error separation arithmetic for astronomical calibration of optical measurement equipments[J].Opto-Electronic Eng.,2008,35(12):28-33.(in Chinese)
[4] 魏合理,陈秀红,余凯,等.白天CCD观星可探测极限星等值分析[J].强激光与粒子束,2007,19(2):187-192.WEI H L,CHEN X H,YU K,et al..Analysis of the detectable stellar magnitude limit using CCD camera in daytime sky background[J].High Power Laser and Particle Beams,2007,19(2):187-192.(in Chinese)
[5] 谭碧涛,景春元,王宝国,等.卫星星等的可见光电视测量方法[J].红外与激光工程,2006,35(S4):397-400.TAN B T,JING CH Y,WANG B G,et al..Measuring the star magnitude of manmade satellites with visual TV[J].Infrared and Laser Eng.,2006,35(S4):397-400.(in Chinese)
[6] 续敏,王建立,陈涛.短波红外用于白天卫星探测的研究[J].光学技术,2008,34(2):277-280.XU M,WANG J L,CHEN T.Study on application of short wave infrared to detecting satellites in the daytime[J].Opt.Technique,2008,34(2):277-280.(in Chinese)
[7] 尚海林.复杂场景下弱小目标检测算法的FPGA实现[J].航空兵器,2007(4):22-24.SHANG H L.A detection algorithm of small targets in complex background implemented by FPGA[J].Aero Weaponry,2007(4):22-24.(in Chinese)
[8] 冯小勇,朱明,向治强.白天暗小恒星目标电视实时探测方法[J].光学学报,2010,30(4):1009-1014.FENG X Y,ZHU M,XIANG ZH Q.The method of television real-time detection on dark and small stars targets in the daytime[J].Acta Opt.Sinica,2010,30(4):1009-1014.(in Chinese)
[9] 管志强,陈钱,钱惟贤,等.一种背景自适应调整的弱点目标探测算法[J].光学学报,2007,27(12):2163-2168.GUAN ZH Q,CHEN Q,QIAN W X,et al..An adaptive background adjusting algorithm for dim target detection[J].Acta Opt.Sinica,2007,27(12):2163-2168.(in Chinese)
[10] 刘贵喜,刘冬梅,刘凤鹏,等.一种稳健的特征点配准算法[J].光学学报,2008,28(3):454-461.LIU G X,LIU D M,LIU F P,et al..A robust image registration algorithm based on feature points matching[J].Acta Opt.Sinica,2008,28(3):454-461.(in Chinese)
[11] 王海红,曾妮,陆威,等.基于小波变换和数学形态学的激光成像雷达图像边缘检测[J].中国激光,2008,35(6):903-906.WANG H H,ZENG N,LU W,et al..Edge detection of laser imaging radar based on wavelet transform and mathematical morphology[J].Chinese J.Lasers,2008,35(6):903-906.(in Chinese)
[12] 郑毅,刘上乾.基于最大模糊熵和遗传算法的图像分割[J].光学技术,2006,32(4):578-580.ZHENG Y,LIU SH Q.Image segmentation based on maximum fuzzy entropy and genetic algorithm[J].Opt.Technique,2006,32(4):578-580.(in Chinese)