基于代理的合弄智能控制结构的理论研究
2011-09-26赵中敏
赵中敏
(淮海工学院工程训练中心,江苏连云港222005)
伴随着全球统一大市场的逐渐形成,企业竞争的加剧,用户需求的多样化,市场环境的快速变化,传统的、僵化的制造模式已经不能满足制造业的需求。制造企业只有抛弃大批量生产方式,才能突破环境及经济因素的限制[1]。于是人们探讨一种能适应未来需要,对动态市场做出积极有效反应的新的制造模式。在日、美等国发起IMS计划当中,合弄制造系统(Holonic Manufacturing System,HMS)是比较有影响的一种思想。它与敏捷制造的出发点基本是相同的,但敏捷制造更偏重于利用人工智能技术研究新的未来灵活制造模式,而HMS更侧重于利用现有技术,强调人在企业制造系统中的能动协调作用,不但实现资源的集成,更重要的同样是构建灵活的系统。两者都十分重视人在制造系统中的作用,都强调如何把基于功能的系统构建方法迁移到基于过程、知识的方法上来。HMS关心的是如何有效形成企业的协作文化,而非泰勒的功能细分的方法,从而使制造业从“命令、服从”的模式解脱出来,转向“合作、创新”的模式[2]。
1 制造系统控制结构的现状和演变
制造系统主要有3种基本结构形式:集中控制结构(Centralized Form)、分层递阶控制结构(Proper Hierarchical Form)和协同控制结构(Heterarchical Form),见图1。

集中控制结构具有设备投资少、易于全局优化等优点,所以早期的控制系统大多采用这种结构;但它同时也存在着可靠性低、响应速度慢和可扩展性不好等缺点。目前的控制结构普遍采用分层递阶结构,在实现方法上采用自顶而下的结构化实现技术。用这种结构开发的系统大多为定制控制系统,当控制系统的需求发生变化时,这种控制系统大多必须重新开发。当前的计算机集成制造系统(CIMS)、柔性制造系统(FMS)大多采用这种结构,这是目前FMS和CIMS在推广应用和进一步研究开发遇到的主要问题之一。另外一种是协同控制结构,在实现方法上大多采用面向对象或代理(Agent)技术来实现,虽然具有巨大的灵活性和可重组性,但它仅适应用于需求变化大、具有足够同构资源的控制环境。由于这种控制结构在这方面的限制,所以很少在控制系统中应用。由此可见,上述各种控制结构很难实现“可重组”的性能指标。为了实现“可重组”必须采用新的控制结构。
在此,引入一种合弄控制结构(Holarchy)。所谓合弄(Holon),它是指一种系统构造单元,相对于其上层组织具有协作特性的部分,相对于其下层组织具有自律特性的整体;一个合弄可以是另一个合弄的一部分,同时又可以是由其他一些合弄组成的。
合弄结构将递阶结构和协同结构的优点很好地结合在一起,体现在其控制的相对分散性和集中性上。集中控制和递阶控制方式过于刚性,很容易突然失灵;而协同控制结构方式过于分散、缺少整体优化性。在合弄控制中,由于合弄的相对自律性以及整个系统负责的系统协调机制的存在,控制既是相对分散的,又是相对集中的,由所有合弄共享,在系统的每层上都存在有管理控制功能。
因此,以这种控制结构形式的控制系统就像一个“魔方”,其功能组成单元就好像是魔方的一个个不同颜色的方块,市场对控制系统的需求就像人们要求的魔方的目标,人们可以按市场需求重组控制系统各组成单元。控制系统中的每一个功能模块既具有相对独立性又和控制系统其它部分具有合作性,可随时按市场需求构成所需的结构形式,实现可重组控制系统的目标。
2 合弄控制的产生及其特点
合弄及其相关概念来自匈牙利记者Koestler对社会组织和生物组织中的层次结构关系的研究。他发现绝对意义上的“整体”和“部分”在任何情况下是不存在的。Koestler将现实生活中具有“整体”、“部分”双重特性的对象定义为Holon,将其译成合弄,既是音译又是意译。同时,Koestler还将由合弄这种自相似单元组成的分层结构定义为合弄结构(Holarchy)。
合弄结构将递阶结构和协同结构的优点很好地结合在一起。一方面,合弄间相互协作以求达到全局目标;另一方面,合弄又表现为是具有智能和自适应特征的自律的、分布式的实体。例如,生物系统中的细胞,它既具有高度的自律性,又与其他细胞一起协商按照上一层组织的策略采取某种行动。
合弄结构可以作为发展下一代制造系统控制结构的基本参考模型。以合弄结构为参考模型,结合制造系统控制结构的发展,可以导出合弄控制结构[3],见图2。

合弄控制结构由不同层次上的合弄构成,从底层往上看,它是一种合弄结构;从顶层往下看,它是一种分形结构。每一层次上的合弄既是自控制者,又是执行者,具有相对独立性和稳定性,不怕干扰的影响,遇到意外事件时可以自己处理而不必向上层请示;同时它又是一种中间形式,受上层合弄的控制,通过通迅网络系统与结构中的其他合弄协商协作共同完成某项更大的任务。合弄的任务不是由自己确定的,而是来自上层和系统。但是,如何完成任务则取决于自己。
3 合弄的开发
整个合弄制造系统HMS包含多个相互作用的合弄,如何开发每个具体的合弄是构造HMS的关键。目前合弄的开发大都采用Agent技术。20世纪80年代中后期,人工智能技术与分布式计算技术相结合,出现了分布式人工智能这个研究方向,从而催生了Agent。
Agent的基本特性:①自治性,即能够在没有人或别的Agent的干预下,主动地、自发地控制自身的行为和内部状态,并且还有自己的目标或意图;②响应性,即能够感知环境,并通过行为改变环境;③适应性,即能根据目标、环境等的要求和制约做出行动计划,并根据环境的变化,修改自己的目标和计划;④社交性,即多个Agent在同一环境中协同工作。
多代理系统(Multi-agent Systems,MAS)是由若干个代理组成的系统。MAS与人类组织非常相似,任务的复杂性和不确定性决定了MAS的组织结构。其复杂性包括任务、信息、合作的复杂性,而不确定性则指算法、环境、信息、行为的不确定。MAS的环境与人类社会相似,系统中的代理相互交流、相互作用,而不是单独地进行推理、采取行动。另外,不同的代理可通过共享属性和服务的方法,进一步封装为一个更为复杂的代理。
3.1 集成代理的合弄结构
基本的制造合弄包括人员、智能控制系统、制造设备三个部分以及对外的人员、信息、物料三个接口。人员与物理实物是合弄的实体资源,而合弄中的Agent和人员所具有的智能则是合弄的智力资源。物理实物可以是订单、货物、加工中心、自动机床等等,它们在不同的环境、不同的合弄中与外界进行实物和信息的“交换”;人员是根据不同的合弄的配置要求配备的,包括计划员、编程人员、操作工、维修工等等,他们在与其他合弄保持沟通的情况下高效地完成自己的任务。在HMS中,合弄利用了Agent的作用,Agent是合弄中最智能的部分,它根据不同合弄的要求形成不同信息,并加以记录;同时可以智能地得出对应的决策方案,进行设备操控与监测、制订对外协作方案;对各种资源进行调度;同时负责对外协作等等。其基本制造合弄结构如图3所示[4]。

3.2 合弄中的Agent的内部构成
集成了代理的合弄具有相当广泛的通用性,可以在各种制造企业环境中结合实际情况实施,其中的代理是合弄的技术关键。在HMS中,Agent的结构设计是非常重要的。为了更好地实现它的智能性,在它的结构中加入了智能人机接口、知识库管理系统和推理机,具体结构设计如图4所示,这样既实现了Agent的智能信息处理与调度,又实现了决策的智能化,同时极大地方便了人机的交互。
其中通讯模块是这里面的通讯中心,通过它与外界的合弄进行沟通[5-6]。智能人机接口是采用AI方法和技术实现的为进行人机交互所需要的物理设备和软件,使用户可以通过以自然语言或类似自然语言的方式描述决策问题和决策目标。推理机和知识库管理系统是智能的核心,知识库是用来存放决策经验和决策知识,或是某一领域专家提供的进行问题求解的经验和知识;而推理机的操作对象主要是知识库,其根据一定的推理策略从知识库中选择知识,对它的“用户”提供相应的推理结果。智能控制模块是根据得到的指令进行智能的控制,包括命令的实施、监督和反馈。计划、调度优化与投标模块是Agent智能计划、调度优化和投标的关键模块,通过各个数据库和得到的信息,进行自动设计并发出指令,实现Agent的智能处理。

3.3 代理型合弄之间的协作方式
在完成任务的过程中,合弄之间要进行协作,相互补充,增强个体和整体的竞争能力。例如[7],若干基本制造合弄组成一个虚拟企业等等。(虚拟单元、虚拟车间、虚拟企业本身也是合弄,属于复合型合弄)。但是,合弄之间的协作并非严格按照递阶层次,例如[8],一个虚拟制造单元一级的合弄可以与一个虚拟车间一级的合弄开展协作。合弄之间的协作如图5所示。
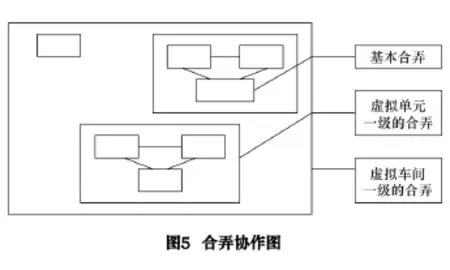
图中,最小的方框代表基本合弄(如基本制造合弄),稍大一些的方框代表虚拟单元一级的合弄,再大一些的方框代表虚拟车间一级的合弄,最大的方框代表虚拟企业一级的合弄。从上往下看,合弄是一个具有自律特征的整体,它有着分形的组织结构特征;从下往上看,合弄是具有协作属性的个体,有着“子—全/部分”[3]的特征(即holon的结构形式)。系统及各层次上的单元可以动态变化,通过重整组合,充分利用各地的资源,以迅速响应市场变化。合弄的这种组织形式与动态联盟的概念相似。在图5中所画出的基本合弄不仅包括制造合弄,还包括运输合弄、设计合弄、储存合弄等。所有类型的基本合弄通过协作共同组成了先进的企业级动态联盟。合弄之间的信息传递主要依靠网络来进行,如通过因特网、内特网、外特网等等。
合弄内的代理可以处理与其他合弄的合作,因此合弄之间的合作方式可以引用MAS的方法来进行。MAS的基本合作模式有任务共担和结果共享两种,而合作的策略主要有4种:协商法、FA/C法、多代理规划法和联合责任法[5]。
3.4 合弄间的交互
Agent的开发平台是 JADE(Java Agent Development Framework,JADE)提供了一组完全遵从 FIPA(Foundation for Intelligent Physical Agents)规范的系统服务和代理,包括命名服务、黄页服务、消息传递和FIPA交互协议包,简化了多代理系统的开发。
合弄的协作能力是合弄控制系统的关键,系统的总体目标是通过不同合弄的协作来完成的。合弄间的协作是基于合弄间的信息交流,而信息交流必须解决3个关键问题,分别为交流语言、交互协议和Ontology。合弄间的交流语言主要包括KLMN和FIPA,交互协议主要有合同网协议,Ontology描述了合弄生存、活动的环境,通过Ontology,合弄之间才可以理解彼此交流的信息[9]。
4 结语
尽管Agent与Holon规范及它们的结合在制造领域的应用是近几年的事,但是它们建立了适应新一代制造系统要求的控制哲理,指明了满足制造业竞争挑战的可行发展方向。随着科学技术的发展和社会需求的变化,制造系统的控制结构在不断进化。Agent和Holon的自治、合作能力使它们成为构建开放的、柔性控制结构的最卓越的技术规范,并可能扩展到整个先进制造的过程集成、信息集成、企业集成及其它系统应用领域。
从基于Agent的控制结构与Holon制造的研究和应用现状来看,以下几个方面将是今后一段时间内研究和实践的重点:①从系统的角度对Agent系统、Holon系统及两者结合的控制系统进行深入的理论研究,制定严格、规范的定义、描述和建模方法。②研究控制结构的实现机制。其中包括将Agent和Holon映射到面向分布式对象环境、进行对象化包装的实现方法,以及支持异构自治体间信息交互的通信机制、协议和支撑平台的研究和开发等。③选择典型车间、工厂、企业进行有成效的试点应用。
[1]Tomiyama T.A manufacturing paradigm toward the 21st century[J].Integrated Computer Aided Engineering,1997,4(3):159 -178.
[2]王成恩,程凯.基于自治及合作的整子制造系统[J].信息与控制,1999(6):190-196.
[3]唐任仲.HMS—合弄制造系统[J].航空制造工程,1996(1):3-4.
[4]袁红兵.Holonic制造系统模型及控制技术研究[D].南京:南京理工大学,2002.
[5]肖晴,等.多作用体系统的研究现状[J].控制与决策,1997,12(1):391-395.
[6]段广洪,等.多智能体系统:一种新型的生产运行模式[J].中国机械工程,1998(2):23-27.
[7]唐任仲,等.基于合弄制造原理低成本自动化制造技术[J].中国机械工程,1998(6):22-24.
[8]毛宁,等.敏捷制造模式下的单元化制造[J].中国机械工程,1998,(6):25-27.
[9]赵普,郑力,刘大成,等.基于代理的合弄控制系统的设计与开发[J].制造技术与机床,2006(2):54-57.