模糊神经网络PID在恒气体流量控制中的应用
2011-08-15杜鲁滨张存
杜鲁滨张存
(1.新能凤凰(滕州)能源有限公司,山东 滕州 277527;2.太原理工大学,太原 030024)
气流量控制在工业领域是个常见系统,但是该系统较复杂,它与流量变送器信号、流体密度、相对湿度、压力和温度等因素有关。气体恒流量采用典型的闭环控制系统来实现的,控制方案通常采用传统的比例积分微分调节器,但其三个控制参数Kp、Ki、Kd一般是人工整定,有一定的局限性,不能在线实时调整[1],已无法满足控制的要求,此时在近几年迅速发展的模糊控制(Fuzzy)和神经网络(Neural Network)无疑映入我们的脑海。常规PID、模糊控制及神经网络三种控制作用的优缺点如表1所示。
从表1可知,常规PID、模糊控制(Fuzzy)及神经网络(Neural Network)三种控制算法都有各自的优缺点,鉴于此本文将PID、模糊和神经网络三种控制技术的优点相结合,用神经网络来构造模糊系统,即利用神经网络的学习方法来调整模糊系统的参数,扬长避短使控制效果大幅提高。本文采用模糊RBF神经网络在线实时整定PID控制器的三个参数Kp、Ki、Kd,从而实现对气体流量的实时监控。

表1 三种PID控制算法的优缺点
1 模糊神经网络控制器的结构和原理
RBF模糊神经网络(FuzzyRBFNN)的结构如图1所示。该网络由输入层、模糊化层、模糊推理层及输出层构成。第一层为输入层,第二、第三层为隐含层,第四层为输出层[2]。
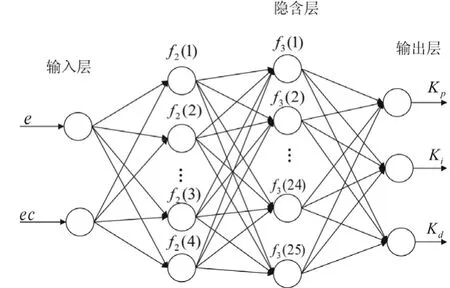
图1 Fuzzy RBFNN的结构
FuzzyRBFNN有两个的输入节点,分别为标准气流量的偏差e和偏差变化率ec。本文偏差e和偏差变化率ec模糊量的量化等级选为5级,具体定义如下:
e的论域为:[-2,2]
ec的论域为:[-2,2]
e的模糊语言值为:{NB,NS,ZO,PS,PB}
ec的模糊语言值为:{NB,NS,ZO,PS,PB}[4]
由此可以确定Fuzzy RBFNN第二层的节点数为L=5,第三层的节点数为N=5×5=25。Fuzzy RBFNN的输出层节点数为3,分别为PID控制器的Kp、Ki、Kd三个参数。
第一层:输入层。
输入节点个数也是输入变量个数,输入层(第一层)的各节点直接与输入量的各分量相连接,把输入量传递到下一层。第一层的每个节点i的输入输出关系可表示为

第二层为隶属度函数层。
本层的功能主要是模糊化输入变量,各输入变量模糊子集数的和就为本层节点的个数,每个节点就代表一个语言变量值,其主要作用是计算每个输入分量属于各语言变量值模糊集合的隶属度函数,本文采用高斯函数作为隶属函数,cij和σij分别是第i个变量第j个模糊集合的隶属函数的中心和宽度[2]。

第三层:模糊推理层。
把模糊推理层和模糊化层(即第二层和第三层)连接起来,实现模糊规则的匹配及各节点间的模糊运算,根据Fuzzy系统的推理方式(if A And B then C),确定Fuzzy RBFNN的模糊推理层的个数为5×5=25个,也就是系统中49条Fuzzy规则前件。本层每个节点的输出(每条规则的适用度)是该节点所有输入信号的乘积[4],即

第四层:输出层。
本层采用加权平均的方法来反模糊化,可清晰准确的计算出输出参数,从模糊化层(第三层)到输出层(第四层)的初始权值是影响控制器输出的关键因素。Kp、Ki、Kd是模糊RBF神经网络PID控制器的输出层的三个节点输出。

式中,wij组成输出节点与第三层各节点的连接权矩阵i=1,2 3,。即
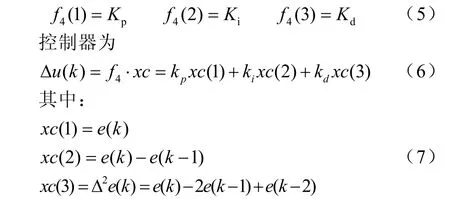
采用增量式PID控制算法:

采用Delta学习规则来调整参数,定义目标函数为
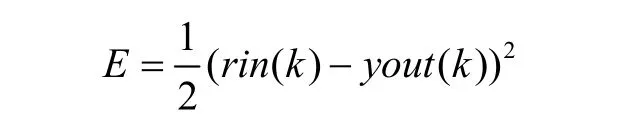
式中,rin(k)为网络理想输出;yout(k)为网络实际输出;rin(k)-yout(k)为每一个迭代步骤k的控制误差。网络权值的学习算法为

式中,Wj为网络输出节点和上一层节点的连接权,j =1,2,…,N,η为学习效率。
如果考虑动量因子,则输出层权值为

式中,k为网络的迭代步骤,α为学习动量因子[2]。
2 模糊神经网络控制器的设计步骤
该控制器控制算法步骤归纳如下:
1)确定Fuzzy RBF神经网络输入层节点数、隐含层节点数及输出节点数,设定各层的加权初始值,选定学习速率η及动量因子α,此刻k=1。
2)采样得到rin(k)和yout(k),计算该时刻误差error= rin(k)-yout(k)。
3)计算神经网络各层神经元的输入、输出,输出层输出即为PID控制器的三个可调参数Kp、Ki、Kd。4)采用经典增量式数字PID的控制算法:

计算PID控制器的输出u(k)。
5)神经网络学习训练,在线实时调整加权系数,实现PID的三个控制参数的自适应调整。
6)最后判断精度是否满足要求,如果不满足置k=k+1,返回到(1)循环执行,否则程序运行结束[5]。
3 仿真分析
在Matlab软件M文件的编程环境下进行仿真,网络学习速率η=0.20,学习动量因子α=0.02,加权系数初始值取区间[-2.0,2.0]上的随机数,采样周期Ts=4s,当输入信号为单位阶跃信号(rin(k)=1.0)时,采用M语言进行仿真得到系统的响应曲线如图2所示。
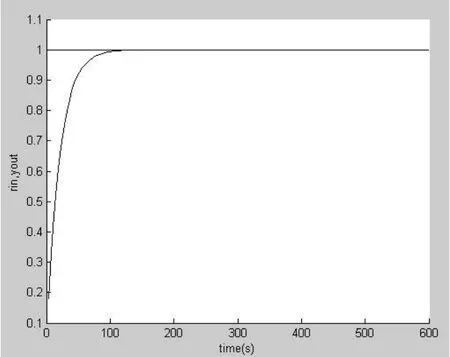
图2 模糊RBF-PID算法的阶跃响应曲线
本文还需设计传统PID、模糊PID、RBF神经网络PID三种控制器,以便于与模糊RBF神经网络PID控制器的性能相比较。在M文件的编程环境下,四种控制算法的阶跃响应曲线如图3所示。其中,1为常规PID的阶跃响应曲线;2为模糊PID的阶跃响应曲线;3为RBF神经网络PID的阶跃响应曲线;4为模糊RBF神经网络PID的阶跃响应曲线。
为了比较四种控制方案的抗干扰能力情况,在k=100,即T=400s时刻加一干扰信号 ξ(100) =0.1,此时四种控制算法的响应曲线如图4所示。其中,1为常规PID的响应曲线;2为模糊PID的响应曲线;3为RBF神经网络PID的响应曲线;4为模糊RBF神经网络PID的响应曲线。

图3 常规PID、Fuzzy-PID、RBFNN-PID、Fuzzy RBFNN-PID无干扰时的阶跃响应曲线

图4 常规PID、Fuzzy-PID、RBFNN-PID、Fuzzy RBFNN-PID有干扰时的阶跃响应曲线
通过比较上图四种控制算法响应曲线的调节时间Ts(s)、超调量σp(%)及稳态余差e(∞)(%)可知:Fuzzy RBFNN-PID的控制性能要明显地优于其他几种控制方式,该控制系统调节时间快,超调量小,抗干扰性强,适应性好。通过仿真分析表明Fuzzy RBFNN-PID控制的可行性及优越性,针对气体恒流量控制系统的特点,采用Fuzzy RBFNN-PID参数自整定控制气体流量将会起到很好的效果。
[1]董春宵,赵元黎,张永利等.Fuzzy-PID算法在气体流量控制中的应用[J].微计算机信息,2008(25):31-33.
[2]刘晓丹.基于RBF模糊神经网络的船用锅炉汽包水位控制研究[D].大连大连海事大学,2008.
[3]吴文贡,应科炜,汤达斌等.基于单片机的流量控制系统[J].仪表技术,2006, (3):25-26.
[4]黄运生,张少华,陈学.还原气体流量的模糊自适应PID控制[J].电气传动,2009,39(8):48-51.
[5]飞思科技产品研发中心.Matlab 7辅助控制系统实际与仿真[M].北京:电子工业出版社,2005:7-61.
