基于单轴气浮台的角动量输出测量方法
2011-08-09田留德赵建科张周峰龙江波段亚轩
田留德,赵建科,薛 勋,张周峰,龙江波,段亚轩
(中国科学院西安光学精密机械研究所,陕西 西安 710119)
0 引 言
在轨运行的航天器处于空间微重力环境下,对外是一个独立的系统,整个系统基本不受外力矩作用,系统角动量守恒[1]。航天器上任何一个部件角动量的变化都会给整个平台带来扰动,研究和测量转动部件的角动量输出对航天器姿态控制设计具有重要指导意义。如卫星姿态控制系统设计时,需要对各个飞轮的角动量输出以及多个飞轮的耦合输出进行精确测量[2-3]。因此,研究转动部件特别是多转动单元、多自由度耦合角动量输出的测量方法具有较大工程意义[4]。
1 测量原理
转动部件对其安装面的力学输出可以用力矩和角动量2个参数表示,这2个参数分别表示力学作用的瞬时效应和累积效应,两者可以通过微分或积分运算相互转换。测量和评估转动部件对其安装面的力学输出特性,可以通过测量输出力矩或输出角动量实现。但是,直接对输出力矩进行测试,系统需要较高的带宽,因此试验中往往对输出角动量进行测量,如果需要了解瞬时作用情况,则对输出角动量进行微分运算即可。
角动量计算公式为

式中:J——转动惯量;
ω——角速度。
由式(1)可知,具有单个转动单元的转动部件的角动量输出,可以通过测量转动单元的转动惯量和转动单元相对安装面的角速度实现。但是,对于多转动单元、多自由度以非正交方式耦合的情况,如果分别对各个转动单元角动量输出进行测量,然后通过耦合分析得到的综合输出会因中间环节过多而增大测试误差。利用气浮平台可以实现转动部件耦合角动量输出的直接测量,从而减少中间环节,提高测量精度。
气浮台充气状态下,摩擦力矩很小。忽略气浮台摩擦力时,气浮台转动台面所受外力矩为零,气浮台旋转台面及台面负载(主要有被测转动部件、其他测量设备等)组成的系统角动量守恒。因此,气浮平台作为一个动量守恒系统,可以模拟空间卫星平台。设气浮台转轴为z轴,则有

式中:JZ,K、ωZ,K——被测转动部件的第K个转动单元绕z轴的转动惯量及转速沿z轴的分量;
JD、ωD——系统定子(包括气浮台转动台面和相对台面静止的台面负载)绕z轴的总转动惯量及角速度;
H0——系统的初始角动量沿z轴的分量。
若系统初始角动量为零,则式(2)简化为

试验关心的是转动部件工作时对其安装面输出角动量的大小,不是其自身角动量的大小。因此,对式(3)整理可得被测转动部件输出角动量Hout为


——转动部件力学输出对系统的扰动,对其进行微分,即可得到转动部件输出力矩的大小及变化情况。
对于系统初始转动惯量不为零的情况,式(4)变为

式中:ω0——系统初始角速度。
2 测量装置与方法
2.1 测量装置
测试平台选用摩擦力矩小于0.001N·m单轴气浮平台,在其转轴自由度上角动量近似守恒。整个测试系统如图1所示。

图1 角动量测试系统构成示意图
整个测试系统由单轴气浮平台、高精度砝码、光纤速率陀螺及数据采集系统、时统、无线通信模块以及数据处理计算机等构成。测试系统工作原理如图2所示。

图2 角动量输出测量原理框图


2.2 测量方法
测试分为2步:(1)测量气浮平台转动台面及台面负载的转动惯量;(2)测量转动部件工作时气浮台转动角速度。
基于气浮平台的转动惯量测量方法有如下3种:落体法[5]、附加转动惯量法[6]、附加惯量扭摆法[7-8]。
重点介绍落体法(加速度法):在气浮平台转动台面外沿上缠绕一条柔软而不易变形的细线(吊线),吊线的一端固定在气浮平台的外沿上,另一端通过滑轮固定在落体上,如图1所示。气浮台承受落体重力矩的作用,作匀加速运动,测量落体质量及气浮台转动的角加速度,按式(6)计算转动惯量。

式中:m——落体质量,kg;
R——气浮台转动台面半径,m;
ω˙——气浮台转动角加速度,rad/s2;
M0——气浮台摩擦力矩,N·m。
若气浮台摩擦力矩可以忽略,从式(6)可知,只要对落体质量及气浮台转动角加速度进行精确测量,即可实现任意复杂不规则物体转动惯量的测量。
在气浮台摩擦力矩不能忽略的情况下,为消除摩擦力矩的影响,可采用差值落体法,即先后悬挂2个质量不同的落体分别进行测量。
摩擦力矩可以认为与落体质量无关,则改变落体求得转动惯量为

将式(6)和式(7)对比,消去 M0得到通过 2次吊挂落体测量转动惯量的计算式为

利用速率陀螺分别测量气浮平台初始角速度和被测转动部件工作时气浮平台的角速度,然后计算被测转动部件输出角动量。
3 试验及结果分析
3.1 测量精度验证试验
为验证该系统的测量精度,以质量为50.30kg、转动惯量为1.096kg·m2标准体为例进行了试验。
(1)使气浮台浮起并进行调平,将被测转动部件固定在气浮台转动台面上,并使其与气浮台同轴。
(2)测量气浮台转动台面及台面装置的转动惯量,测试采用落体法。具体试验方法:在台面直径为D=1m的气浮台边缘处通过滑轮悬挂质量为m=500g的标准砝码。速率陀螺测量气浮台转动角速度,其曲线如图3所示。用Matlab软件对气浮台转动角速度进行拟合,得气浮台转动角速度表达式为
ω=8.985t-2.9913
则气浮台的角加速度为

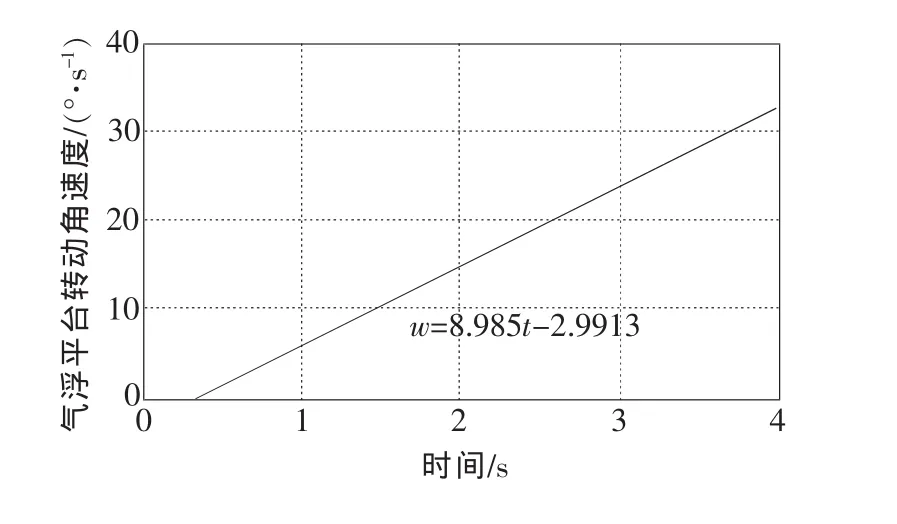
图3 气浮平台转动角速度曲线
(3)利用速率陀螺测量气浮台初始角速度。由于气浮台难以绝对调平而且其摩擦力矩极小,其初始速度呈正弦振动,且阻尼很小。其角速度曲线如图4所示。
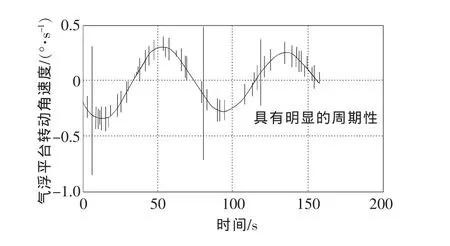
图4 气浮台初始角速度曲线
(4)驱动被测转动部件做速度为 ω=8sin(0.5 t)的正弦转动,此时,气浮台角速度曲线如图5所示。

图5 气浮台转动角速度曲线
3.2 数据处理与分析
为了消除气浮台初始角速度对测量结果的影响,对气浮台初始角速度(图4)及转动部件工作时气浮台角速度(图5)进行频谱分析得到:图5曲线的2个峰值频率为0.0122Hz和0.07935Hz,分别与图4曲线的峰值频率和被测转动部件的驱动频率一致。根据该特性在测试结果中减去气浮台初始角速度的影响,处理后的角速度曲线如图6所示。
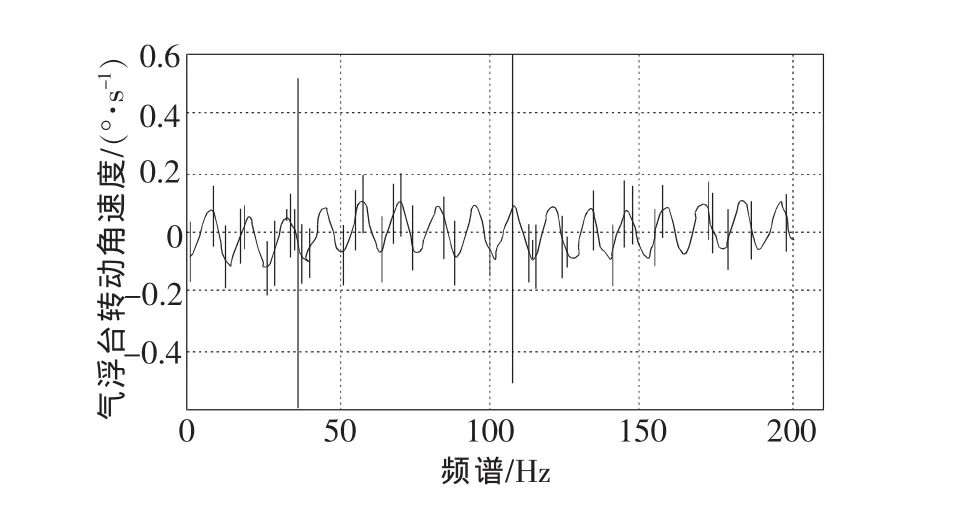
图6 气浮台转动角速度曲线
从上面的处理结果可以看出气浮台响应与被测转动部件的运动同频,为便于分析忽略时间延迟,得气浮台转动角速度为

由式(5)可得被测转动部件的角动量输出为0.0268cos(0.5t),最大输出角动量为 0.0268N·m·s。
3.3 测量误差分析
由于转动惯量和角速度的测试是独立的,根据误差传递的线性叠加法,则对测试结果进行误差估算。测量误差ΔH为

角速度测量由高精度光纤陀螺实现,陀螺测试精度可控制在0.003°/s以内。因此,取角速度测量误差ΔωD、Δω0为 0.003°/s。转动惯量测试误差ΔJ受砝码的质量、角加速度及气浮台转动台面直径测量精度的影响。取砝码质量误差Δm=0.2g,气浮台转动角加速度误差 Δω˙=0.1°/s2,气浮台台面直径误差 ΔR=1mm,计算得到转动惯量测试误差 ΔJ=0.0924kg·m2,由式(11)得测量误差 ΔH=±0.00116N·m·s,相对测量误差为4.3%。
4 结束语
采用单轴气浮台对复杂转动部件,特别是对多运动单元多自由度运动的耦合角动量输出进行测量,是研究转动机构力学特性的一项重要手段。该方法的优点是可对耦合效果进行直接测量,不受具体耦合方式的限制,且测量精度较高,测试设备简单,具有较强的工程应用价值。
[1]鲁兴举.空间飞行器姿态控制仿真试验平台系统研究与设计[D].长沙:国防科技大学,2005.
[2]韩邦成.单轴飞轮储能/姿态控制系统的仿真及其试验研究[D].长春:中国科学院长春光学精密机械与物理研究所,2004.
[3] 赵万良.高精度高稳定度反作用飞轮设计与实现[D].上海:上海交通大学,2008.
[4] 邓以高,田军挺.飞行器姿态控制方法综述[J].战术导弹控制技术,2006,53(2):7-13.
[5] 于治会.落体法测定构件惯性矩的几个问题[J].上海航天,2000(2):57-62.
[6] 李季苏,吴振嵩.测试单轴气浮台转动惯量的一种方法[J].航天控制,1994(3):60-73.
[7] 杨辉,洪嘉振,余征跃.测量单轴气浮台转动惯量的新方法[J].振动与冲击,2001,20(2):32-34.
[8] 贾杰,周凤岐,周军.三轴气浮台转动惯量测试方法研究[J].航天控制,2006,24(2):73-77.