基于单片机控制的水上清洁机器人液压系统的开发
2011-07-25吴怀超
吴怀超,方 毅,何 林
(贵州大学 机械工程学院,贵州 贵阳 550003)
1 引言
随着国民经济的不断发展,我国水源污染问题日益严重,在很多水面如河流、水库、海水浴场上都漂浮着塑料袋、泡沫、树叶等很多垃圾,严重影响着人们的健康生活和环境的美丽[1,2]。目前,大型打捞船体积大、成本高,需多人同时协同工作,而且不能进入小区域实施打捞工作;而在一些小型区域水面上目前主要依靠的是人工打捞,其工作难度和劳动强度都很大[1,2]。为此,本文设计了一种适合于中小型区域进行打捞作业的水上清洁机器人,此机器人具有体积小,成本低、操作简单,灵活可靠、效率高、打捞水域广等特点。
水上清洁机器人的核心是其液压控制系统,针对此,本文首先根据水上清洁机器人的功能要求,设计了其液压系统,然后采用单片机技术实现了该液压系统的自动控制,从而为该类型机器人液压控制系统的开发提供了可以借鉴的参考资料。
2 水上清洁机器人的结构和工作原理
水上清洁机器人的结构主要包括船体、浮体、打捞手臂、聚拢板、打捞板、推板、悬挂机、液压系统、控制系统、图像采集与传输系统等部分组成,其外形结构简图如图 1所示。
如图 1所示,由两个密封浮体使整个机器人浮在水面上进行工作,船体的动力源来自安装在后部的悬挂机提供,而机器人的机械动作则由液压控制系统的5个液压缸来完成,其工作过程如下:
操作者通过图像采集与传输系统遥控机器人接近所要打捞的垃圾,使聚拢板包围所要打捞的垃圾(聚拢板初始为张开状态),然后,通过控制两个液压缸使两片聚拢板合拢,聚拢板合拢到位后,关节伸缩缸伸出使机械打捞手臂向上抬起,之后,基本手臂变幅缸缩回(该液压缸初始为伸出状态),使基本手臂向前倾斜,这样一来,在关节伸缩缸和基本手臂变幅缸的控制下,机器人的手臂使打捞板远离船体而接近水面,和聚拢板一起包围所要打捞的垃圾,至此,打捞垃圾的准备工作己完成,接下来就要完成打捞工作了。
打捞时,基本手臂变幅缸伸出,同时,关节伸缩缸处于自由状态,从而,机械手臂使打捞板顺着船体前部的斜坡将垃圾打捞到船体的垃圾回收仓中,至此,打捞垃圾的工作己完成。
为了给下次打捞的垃圾留出空间,垃圾被打捞到垃圾回收仓中后 ,还需要将垃圾进行转移,即将垃圾从垃圾回收仓的前端转移至后端,这一过程,由一个液压缸控制推板来完成的,当垃圾从垃圾回收仓中的前端转移至后端后,此次打捞工作全部完成,然后,重复上述过程完成下次的打捞。
3 水上清洁机器人液压系统的设计
根据上述打捞垃圾的工作过程,设计了如图 2所示的水上清洁机器人液压系统原理图。
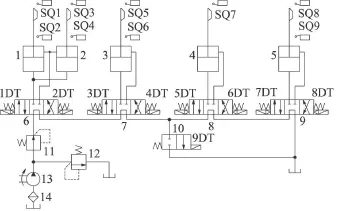
图2 水上清洁机器人液压系统原理图
如图 2所示,缸 1和缸 2为控制两片聚拢板合拢与打开的液压缸,每个液压缸控制一片聚拢板;缸 3为基本手臂变幅缸;缸 4为关节伸缩缸;缸 5为将垃圾从垃圾回收仓的前端转移至后端的推板控制缸。所有缸都是通过接近开关进行位置控制,都是通过各自的三位四通电磁换向阀控制其伸出与缩回的换向。根据液压传动与控制的相关知识[3],设计的减压阀 11起减压和稳压的作用;溢流阀 12起安全保护的作用。根据水上清洁机器人的工作原理,图 2所示 9个电磁铁的动作顺序如表 1所示。
如表 1所示,机器人在每个阶段的每个动作在完成后会触动相应的接近开关,使相应的电磁铁通电或断电,其中,当缸 3和缸 4配合完成垃圾收集时,3DT、6DT和 9DT都通电,这就保证了在基本手臂变幅缸 3伸出的同时,关节伸缩缸 4处于自由状态,即关节伸缩缸 4的无杆腔和有杆腔都接通油箱,其压力都接近“0”,其目的是使缸 3伸出使基本手臂抬高的同时,机械手臂关节能自由折合,从而使打捞板能顺着船体前部的斜坡将垃圾打捞到垃圾回收仓中。
4 水上清洁机器人液压系统的单片机控制
图2所示的液压系统只是整个水上清洁机器人的“神经”,要实现水上清洁机器人的自动工作,还必须给之装上“大脑”,为此,需要开发出图 2所示液压系统的控制部分。
目前,对液压系统的控制,有继电器控制、PLC控制、单片机控制以及微机控制等多种方式,每种控制方式都有其优缺点和应用场合。水上清洁机器人要求机器人本身的重量越小越好,因而,单片机控制是此系统的最佳选择。单片机目前在市场上有很多品种,鉴于图 2所示液压系统的控制是一个时序控制问题,其功能不是很复杂,所要求单片机的资源也不是很多,因而,拟选用常用的 AT89C51单片机,采用此单片机对图 2所示的液压系统进行控制的电路简图如图 3所示。
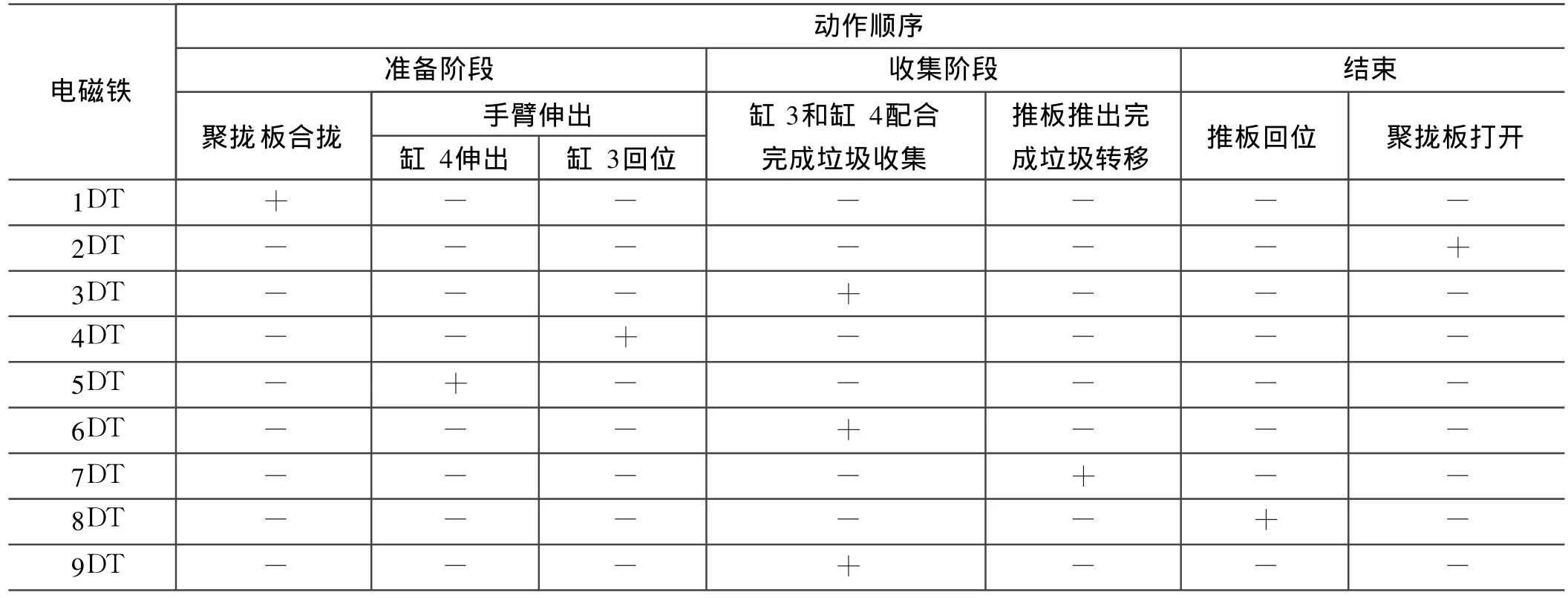
表1 电磁铁动作顺序表
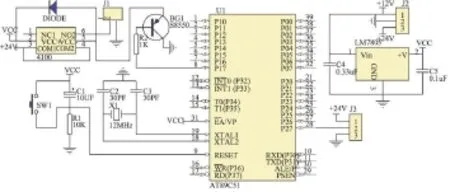
图3 水上清洁机器人液压系统单片机控制电路简图
图2所示的液压系统中有 9个电磁铁,9个限位开关,每个电磁铁和每个限位开关的控制电路是一样的,限于篇幅,图 3只示出了一个电磁铁和一个限位开关的电路图,其中,电磁铁电路接口接在 P1.7引脚上,限位开关电路接口接在P2.7引脚上,其余未示出的电磁铁电路接口分别接在 P1.0-P1.6及 P3.0引脚上,限位开关电路接口分别接在 P2.0-P2.6及 P3.1引脚上。如图 3所示,单片机控制信号从 P1.7引脚输出,经过三极管的放大后接继电器去驱动电磁阀的电磁铁;行程开关的输入信号直接通过接插件输入 P2.7引脚,图3所示电路中使用了电源转换芯片 LM7805将 12V电源转换成单片机所需的 5V电源,接近开关和继电器所需电源电压均为24V。根据单片机的相关知识[4,5],在图 3的电路中,设计了 AT89C51单片机的晶振电路和复位电路。

图4 水上清洁机器人液压系统单片机控制软件流程图
根据水上清洁机器人的工作过程,结合图 2所示的液压系统原理图,可编写如图 4所示的单片机控制软件流程图。由图 4可以看出,此过程是一个时序控制过程,通过此时序控制便能实现水上清洁机器人的自动打捞工作,但由于所控制的电磁铁较多,为了防止误动作,在写程序代码时应注意在相邻电磁铁得电之间加入延时程序。
5 应用
根据上述液压系统及其控制装置的设计,制作了水上清洁机器人的实物,并将机器人投放到湖中进行垃圾打捞作业,图 5是现场作业照片。

图5 水上清洁机器人在湖中打捞垃圾现场图
机器人在湖面现场打捞时,运动灵活,控制方便,智能化程度较高,垃圾打捞效率较高,表明所设计的液压系统及其控制装置发挥了重要作用。通过机器人在湖面打捞垃圾的现场应用,可知该类水上清洁机器人在很大程度上能代替环卫工人的劳动,因而,随着人类活动的日益频繁,该类水上清洁机器人势必将得到广泛应用。
6 结束语
采用单片机技术实现水上清洁机器人液压系统的自动控制,极大地提高了垃圾打捞的自动化和智能化程度。而智能化的水上清洁机器人能极大地降低垃圾的打捞成本,节约大量的人力、物力和财力,对减少人类劳动强度,保护环境卫生和促进可持续发展具有重要的意义。
[1] 曹志强,师忠秀.一种新型水上清洁机器人的设计与实现[J].青岛大学学报(自然科学版),2007,20(2):80-82.
[2] 李金方,司丽丽,杨庆文.螺旋渐进式水上清洁机器人设计方案研究[J].现代制造技术与装备,2009,(3):13-15.
[3] 周忆,于今.流体传动与控制[M].北京:科学出版社,2008.
[4] 赵全利,肖兴达.单片机原理及应用教程(第 2版)[M].北京:机械工业出版社,2007.
[5] 丁元杰.单片微机原理及应用(第 3版)[M].北京:机械工业出版社,2005.
