基于修正LuGre模型的反步自适应摩擦补偿控制
2011-07-23梁青,张剑,王永
梁 青,张 剑,王 永
(中国科学技术大学,安徽合肥230027)
0引 言
摩擦是影响机电伺服系统性能的主要因素之一,会导致系统出现稳态误差、粘滑运动和极限环,因此在高精度伺服系统中必须对摩擦进行补偿。
由于静态摩擦模型只能描述系统处于高速运行时所受的摩擦影响,在系统低速运行时采用静态摩擦模型会有很大的误差,因此基于动态摩擦模型的补偿方法是实际中较为可行的方法。而如何准确地建立动态摩擦模型是实现动态摩擦补偿的关键。近年来,国内外学者在摩擦建模方面进行了大量研究,其中比较著名的有 Dahl模型[4]、LuGre 模型[3]、Elasto-plastic 模型[5]、Leuven 模型[6]和 Generalized Maxwell Slip(GMS)模型[7],其中 LuGre模型由于其模型简单且在描述低速运行时的摩擦特性较为准确,因此得到了广泛的应用。然而当系统处于高速运行时系统所受到的摩擦力主要为库伦摩擦和粘滞摩擦,若仍然采用LuGre模型,必然会使系统的复杂性增加,另外由于温度、润滑程度和接触力等外界条件的变化使得摩擦力矩的参数也会发生变化。目前能同时描述低速和高速状态时系统所受摩擦影响的摩擦模型并且设计相应的自适应摩擦补偿控制器方面的相关文献较少。
本文采用一种改进的LuGre模型[1]来同时描述系统在低速和高速运行时所受到的摩擦力矩,采用反步自适应算法实现了对摩擦的补偿控制,通过仿真并与其他算法比较,验证了本方法的有效性。
1系统建模
1.1伺服系统模型
若伺服系统除摩擦非线性因素之外不考虑其他非线性因素影响,则伺服系统的动力学方程如下[8]:
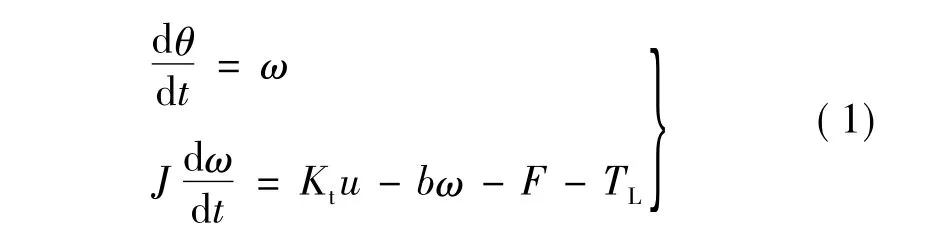
式中:J为等效转动惯量;b为等效阻尼系数;θ为电机角位置;ω为电机角速度;Kt为电机力矩常数;u系统控制量;F为等效摩擦力矩;TL为等效负载力矩(包括外界扰动作用)。
1.2 系统摩擦力矩模型[1]
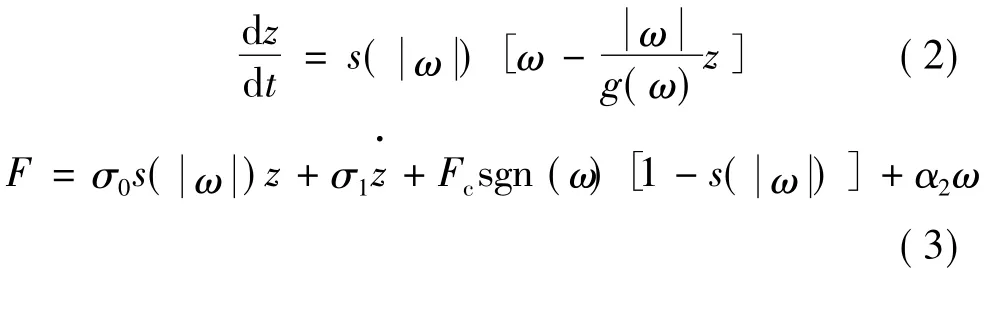

其中:
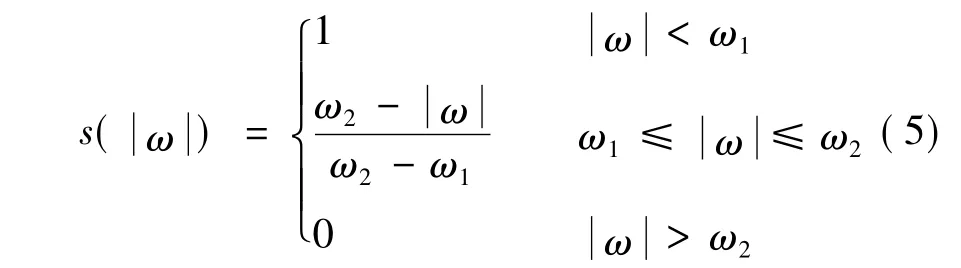
其中:ω2>ω1>0。
式(2)~式(4)中,z为接触表面鬃毛形变量;σ0为鬃毛刚度系数,σ1为鬃毛阻尼系数;Fc为库伦摩擦系数;Fs为静摩擦系数;α2为粘性阻尼系数;ωs为Stribeck速度。


此时系摩擦模型等效于静态摩擦模型,并且静态摩擦模型的参数可以不等于LuGre模型中的静态摩擦模型参数,从而使得该模型具有一定的灵活性。
摩擦受到温度变化影响会导致参数发生变化[9],引入ζ来反映参数受到温度变化的影响。此时摩擦力矩:

从而伺服系统的模型可表示:
2反步自适应控制器设计
由于LuGre模型的中间变量鬃毛形变量不可直接测量,本文设计一非线性观测器来估计鬃毛形变量 z,观测器方程[2,8]:

式中:ρ为观测器的误差补偿项。
定义角位置输出误差和角速度误差:

θref为参考位置信号,参考速度信号如下:

为有效地减小摩擦对系统的影响,我们设计如下的控制律和参数自适应律[2,8]:
其中:k、k1、k2均大于零。
定理:对于式(9)若采用如式(15)~式(19)的控制律和参数自适应律,则闭环系统是渐近稳定的。
证明:定义如下的Lyapunov函数:
式中:r0>0,r1>0,r2>0,式(19)对时间的微分有:

从而系统的闭环稳定性得证。
3仿真分析
仿真主要用来验证本文所提的基于改进LuGre模型的反步自适应摩擦补偿算法的有效性,并与传统的PID固定摩擦补偿方法进行比较。仿真参数设计如下。
伺服系统参数:J=0.9 kg·m2,b=0.3 N·ms/rad,Kt=1,TL=0.5 N·m;摩擦模型参数[2]:σ0=100 N·m,σ1=2.5 N·m,α0=0.28 N·m,α1=0.06 N·m,α2=0.2N·ms/rad,ωs=0.01 rad/s;控制器参数:k1=90,k2=80,k=5,r0=1.2,r1=7.5,r2=10。
为比较控制器补偿性能,将本文方法与文献[9]提到的PID固定摩擦补偿方法进行比较。首先设计位置参考信号:θref=sin(πt),分别使用上述两种方法进行仿真,仿真结果如图1和图2所示。
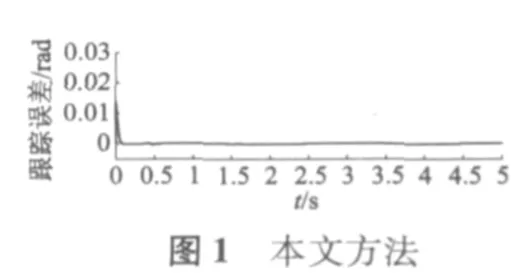
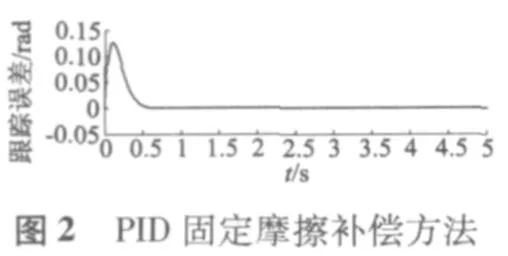
由图1、图2可知,本文所提方法的使得系统跟踪精度更高、响应更快。为进一步验证本文算法的有效性,设系统在3~5 s内受到阶跃的外界扰动的作用,再次使用上述两种方法跟踪正弦信号进行仿真,仿真结果如图3和图4所示。
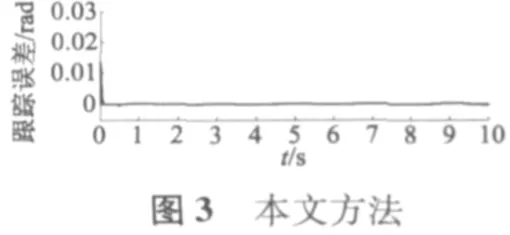
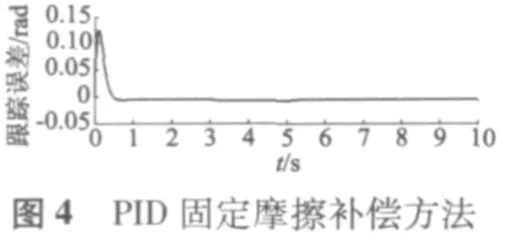
由图3、图4可知,当系统受到外界扰动时若采用PID固定摩擦补偿控制会使系统出现较大的跟踪误差,而本文的方法仍能使系统具有优良的跟踪性能,因此本文所提方法鲁棒性更强。
4结 语
本文采用一种改进的LuGre摩擦模型来描述系统所受摩擦因素的影响,该模型在低速时等效于LuGre模型,在高速时等效于库伦摩擦+粘滞摩擦,使得模型更符合系统实际所受到的摩擦影响,并降低了摩擦模型的复杂度。本文设计的基于修正LuGre模型的反步自适应摩擦补偿控制算法保证了系统在受到摩擦影响时仍具有较高的跟踪性能,且鲁棒性比PID固定摩擦补偿方法更强。
[1] Lu L,Yao B,Wang Q F,et al.Adaptive robust control of linear motors with dynamic friction compensation using modified LuGre model[J].Automatica,2009(45):2890-2896.
[2] Tan Y L,Chang J C,Tan H L,Adaptive Backstepping Control and Friction Compensation for AC Servo With Inertia and Load Uncertainties[J].IEEE Transaction on Industrial Electronics,2003,50(5):944-952.
[3] de Wit C C,Olsson H,htrom K J.A New Model for Control of Systems with Friction[J].IEEE Transactions on Automatic Control,1995,40(3):419-425.
[4] Dahl O.A solid friction model[M].The Aerospace Corporation,El-Segundo,California,USA,1968.
[5] Dupont P,Hayward V,Armstrong B,et al.Single state elastoplastic friction models for friction compensation[J].IEEE Transactions on Automatic Control,2002,47(5):787-792.
[6] Lampaert V,Swevers J,Al-Bender F.Modification of the Leuven integrated friction model structure[J].IEEE Transactions on Automatic Control,2002,47(4):683-687.
[7] Al-Bender F,Lampaert V,Swevers J.The generalized Maxwell slip model:A novel model for friction simulation and compensation[J].IEEE Transactions on Automatic Control,2005,50(11):1883-1887.
[8] 周金柱,段宝岩,黄进.LuGre摩擦模型对伺服系统的影响与补偿[J].控制理论与应用,2008,25(6):990-994.
[9] de Wit C C,Lischinsky P.Adaptive friction compensationwith partially known dynamic friction model[J].International Journal of A-daptive Control and Signal Process,1997,11(1):65-80.