基于Buck-Boost变换器驱动的无刷直流电动机控制系统
2011-07-20孟武胜
孟武胜,王 波,何 博
(西北工业大学,陕西西安710072)
0 引 言
无刷直流电动机(以下简称BLDCM)是一种高性能、高可靠性的机电一体化产品。它具备交流电动机的结构简单、运行可靠、维护方便等优点,又具备有刷直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,同时克服了有刷直流电动机的机械电刷和换向器所带来的噪声、火花、无线电干扰及寿命短等弊病,降低了制造成本,简化了电机的维修。正因为如此,无刷直流电动机在民用和军用技术等领域得到了广泛应用[1-2]。
本文提出一种基于Buck-Boost变换器的无刷直流电动机控制系统,通过转速和直流母线电流的多反馈闭环实现电机控制的策略。在分析此控制系统的基础上,通过MATLAB/Simulink仿真验证了控制系统的有效性。
1 驱动部分
民用无刷直流电动机的驱动一般由交流电源、整流器(交流-直流变换器)、直流母线电容滤波器和实现电机换向的三相逆变器(直流-交流变换器)组成。大多数无刷直流电动机驱动能量由电网单相交流电源提供,所以整流器也是单相的。本文提出方法的驱动总体结构如图1所示。
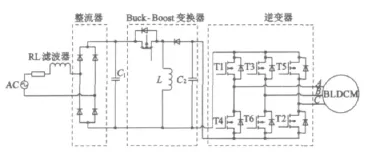
图1 无刷直流电动机驱动总体结构
1.1 BLDCM 数学模型[1-3]
以两相导通星形三相六状态为例,分析无刷直流电动机的数学模型。为了便于分析,假设:
(1)三相绕组完全对称,空间上互差120°电角度;
(2)三相绕组电阻、电感参数完全相同;
(3)转子永磁体产生的气隙磁场为方波,三相绕组反电动势为梯形波;
(4)忽略齿槽、换向过程和电枢反应等的影响;
(5)磁路不饱和,不计涡流和磁滞损耗。则无刷直流电动机数学模型方程式:
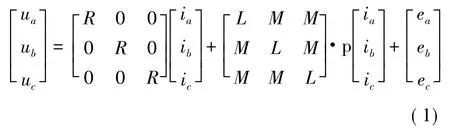

在电机运行过程中,电磁转矩表达式:

式中:ω为电机机械角速度。
机械运动方程:

1.2 逆变器
三相逆变器受无刷直流电动机转子位置传感器的控制。来自位置传感器的信号,按一定的逻辑使三相逆变器的开关管顺序导通,电机电枢绕组内的电流发生跳变,从而改变了定子的磁状态,以保证无刷直流电动机可靠运行。逆变器开关管一般选用MOSFET,因为它有很高的开关频率,易于进行PWM调制。
根据本文提出的方法,Buck-Boost变换器选用高频的MOSFET开关管,所以三相逆变桥开关管可以选用IGBT,并且IGBT采用恒通方式,即每一个状态区间内处于开通的两个开关管不进行 PWM调制,所以逆变器控制比较简单,而且可以极大地减少开关损耗[5]。
1.3 整流器
民用技术中,直流电压通常都是通过单相交流电源得到,采用简单的二极管整流器就可以实现。由于电网电流不是理想的正弦波,而且负载也会产生谐波和干扰,因此在电源端需要加滤波器,本文选用RL滤波器。整流器输出端电容C1的作用是减少直流母线的电压脉动。
1.4 Buck -Boost变换器[7]
无刷直流电动机调速一般是通过改变逆变器中开关管的PWM控制信号实现的,但是这种控制在高速和瞬态时会造成换相延迟和很高的开关损耗。本文通过控制Buck-Boost电路开关管的占空比大小,来连续地调节直流母线电压Vo,进而实现调速,后级三相逆变桥采用恒通控制方式。
Buck-Boost直流变换器也称为反极性变换器,是输出电压可低于或也可高于输入电压的一种单管直流变换器,其电路结构如图2所示。
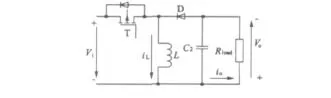
图2 Buck-Boost变换器
理论上,电路中电感L和输出电容C2选取足够大,电流波形和电压波形会很平滑,并在稳态时保持常值。但从经济和尺寸角度考虑,L和C2选取能保持电流与电压脉动在较低水平即可。
变换器基本工作原理是在一个周期的一段时间内使电感储能,在后一段时间内将储能传递给负载,输出电压极性与输入电压相反,开关管采用PWM控制方式,可以推导出如下关系式:
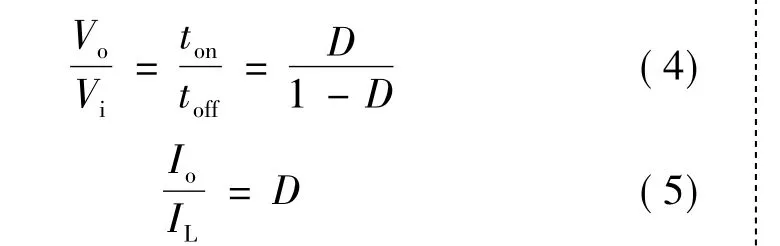
式中:Vo为直流母线电压(Buck-Boost变换器输出电压);Vi为输入电压(整流器输出电压);ton为一个周期内MOSFET开通时间;toff为一个周期内MOSFET关断时间;D为占空比;Io为输出平均电流;IL为电感平均电流。
2 控制部分
无刷直流电动机转子位置传感器提供逆变器开关管IGBT顺序导通的120°方波信号,控制部分通过Buck-Boost变换器调节逆变器输入电压,实现电机控制。
2.1 控制器
改变Buck-Boost变换器中MOSFET开关管占空比可调节逆变器输入电压,开关管MOSFET的PWM控制信号生成如图3所示。
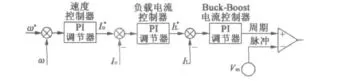
图3 速度电流反馈控制环
转速反馈信号ω与给定转速信号ω*的误差信号通过速度控制器(PI调节器)生成参考母线电流;母线输出电流Io与的误差信号输入负载电流控制器(PI调节器)可以更精确地调节开关管占空比,实现Buck-Boost变换器较小的电流脉动;电感电流IL与参考电流的误差信号通过Buck-Boost电流控制器(PI调节器)可获得MOSFET开关管管的导通周期。输出与三角波相比产生MOSFET管开关频率,三角波的频率选为20 kHz。
3 仿真结果
无刷直流电动机参数如表1所示。
在MATLAB/Simulink环境下,根据无刷直流电动机数学模型,搭建无刷直流电动机典型控制模型以及本文提出的基于Buck-Boost变换器的控制模型,进行仿真比较[8-9]。
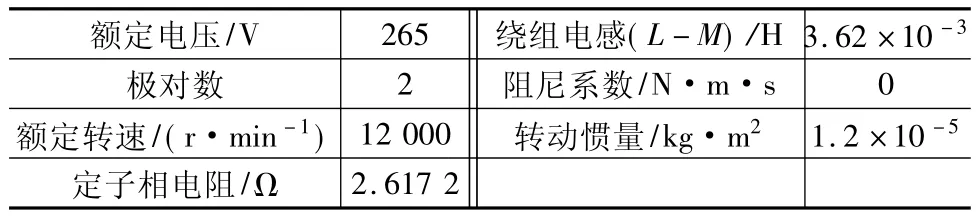
表1 BLDCM参数
无刷直流电动机典型控制模型由265 V直流电源供电,转速和直流母线电流构成双闭环反馈控制。三相逆变器仿真选用开关管MOSFET,开关频率选10 kHz。电机从起动到稳态的定子A相电流,电磁转矩,转速仿真波形如图4所示,电机从起动到转速达到额定转速需要0.05 s左右的时间,稳态时的局部放大波形如图5所示。
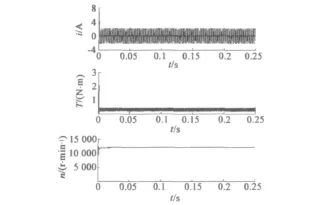
图4 典型控制模型仿真波形
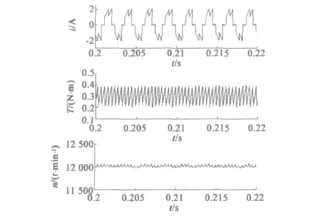
图5 典型控制模型局部放大波形
无刷直流电动机基于Buck-Boost变换器的控制模型从起动到稳态的直流母线电流和电压仿真波形如图6所示。定子A相电流、电磁转矩、转速仿真波形如图7所示。稳态时的局部放大波形如图8所示。
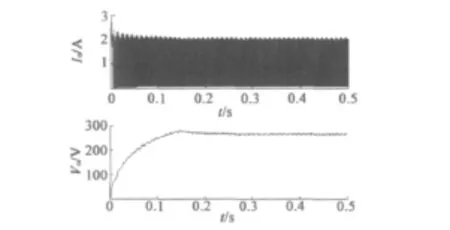
图6 基于Buck-Boost变换器控制模型的直流母线电流、电压仿真波形

图7 基于Buck-Boost变换器控制模型的相电流、电磁转矩、转速仿真波形
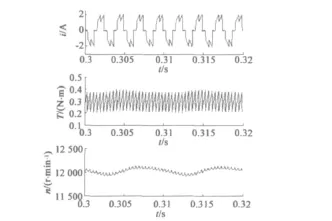
图8 基于Buck-Boost变换器控制模型的相电流、电磁转矩、转速局部放大波形
直流母线电压随着转速的增加而增加。输入单相正弦交流电含有二次谐波,会造成直流母线电压脉动,增大电容C2可以减小直流母线电压的脉动。
无刷直流电动机从起动到转速达到额定转速(12 000 r/min)需要0.15 s左右,这个过程中母线电流比稳态时大,但是在可以接受的范围内。
稳态时定子相电流和电磁转矩的变化频率为100 Hz,是电网频率的两倍,这些都会增大控制系统铜损。
4 结 语
本文提出的无刷直流电动机控制模型,将速度控制从逆变器换向中分离,并且在直流母线中引入了Buck-Boost变换器,通过仿真及波形的分析验证了方案的有效性及可行性。逆变器开关管工作在更低的频率,尺寸更小,成本更低;由于只有Buck-Boost变换器开关管工作在高频状态,逆变器开关损耗会减少;比较图4和图7,本文提出方法通过增加起动时间(0.05~0.15 s),使起动电流和起动转矩减小很多。
主要缺点是电网交流电压脉动会传到驱动电路的其他部分,导致直流母线电压脉动增大,从而使稳态转速波动变大。通过增大滤波电容C1和C2可以减小波动,但增大电容会增加成本和尺寸,所以C1和C2要根据要求适当选取。
[1] 龙驹,舒欣梅.永磁无刷直流电动机转速控制系统的优化设计[M].四川:西南交通大学出版社,2006.
[2] 刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
[3] 叶金虎.现代无刷直流永磁电动机的原理和设计[M].北京:科学出版社,2007:4-43.
[4] 张晓锋,胡庆波,吕征宇.基于BUCK变换器的无刷直流电机转矩脉动抑制方法[D].电工技术学报,2005(9):20-29.
[5] 宋毅.基于Buck-Boost变换器的无刷直流电机转矩脉动抑制的控制仿真研究[D].大连:大连交通大学,2008.
[6] Khopkar R,Madani S M,Hajiaghajani M,et al.A Low - Cost BLDC Motor Drive using Buck-Boost Converter for Residential and Commercial Application[C]//IEEE International Electric Machines and Drives Conference.2003,2:1251 -1257.
[7] 李宏,王崇武.现代电力电子技术基础[M].北京:机械工业出版社,2009.
[8] 杨永亮.双余度无刷直流电机控制技术研究[D].西安:西北工业大学,2007.
[9] 张海涛.高精度双余度舵机伺服系统研究[D].西安:西北工业大学,2007.
[10] Lai Y S,Lee K Y,Tseng J H,et al.Efficiency Comparison of PWM-Controlled and PAM-Controlled Sensorless BLDCM Drives for Refrigerator Applications[C]//Conference Record of the 42nd IEEE IAS Annual Meeting.2007:268-273.