PPS导向系统在西秦岭隧道TBM施工中的应用
2011-06-15戴斌,陈明
戴 斌,陈 明
(中隧集团兰渝铁路西秦岭隧道项目部,甘肃武都 7460251)
0 引言
近年来随着我国经济的发展及施工水平的提高,越来越多的长大隧道开始采用TBM(隧道掘进机)掘进施工,而TBM也因其快速、安全、环保的特点,显示出其他施工方法无可比拟的优越性。常规的人工测量方法已经不能满足TBM快速掘进的要求,PPS自动导向系统应运而生,并以其精确、快速、自动化的工作特点,成为TBM施工的主流导向系统。目前在施工测量技术领域,文献[1-2]对各种导向系统的选用进行了比较和技术总结,文献[3-4]介绍了PPS系统的基本组成及工作原理,文献[5-6]对其误差形成进行了分析,并提出了TBM纠偏方案,文献[7]介绍了PPS系统安装方法及常见故障分析。本文在此基础上对已有的研究文献中PPS系统的工作原理、安装方法等不详之处进行了详细说明,结合PPS在西秦岭隧道TBM施工中的实际经验提出减小测量误差的措施,并总结了大部分常见故障的排除方案,对PPS系统硬件损坏时的应急工作方法提出独到见解。以期达到PPS系统提供持续、有效、精确的掘进参考数据的目的,希望为其他工程中的PPS测量工作提供一些借鉴。
1 概述
西秦岭隧道作为全线控制性工程,全长28 km,TBM掘进段13.7 km,采用直径10.2 m的敞开式硬岩掘进机施工。隧道轴线允许偏差±10 cm,高程允许偏差±10 cm,PPS导向系统的正常工作是保证TBM掘进精度的前提,本文将就PPS导向系统在西秦岭隧道的实际应用情况,对此进行阐述。
2 PPS导向系统工作原理
2.1 系统组成
PPS导向系统由马达棱镜、倾斜仪、全站仪及其电源盒、后视棱镜、多路器、屏蔽数据线、无线发射装置、装有PPS程序软件的工业电脑组成,如图1所示。
2.1.1 马达棱镜
2个马达棱镜在始发前安装在TBM主机上,用螺栓固定牢固,安装后需对棱镜进行防水、防碰撞的保护措施。棱镜的安装位置一定要考虑通视条件的影响,确保全站仪与马达棱镜之间无障碍物阻隔。
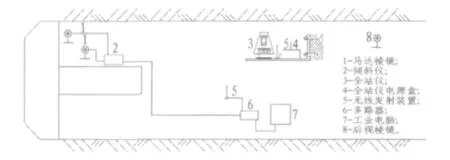
图1 PPS导向系统示意图Fig.1 Sketch of PPS guiding system
棱镜安装完毕后,需要测量2个马达棱镜的机器坐标,即棱镜在以TBM刀盘中心为原点的坐标系中的三维坐标值(水平、径向、垂直)。工作中如果马达棱镜发生移动,则必须重新测量棱镜的机器坐标。
2.1.2 倾斜仪
倾斜仪安装在TBM主机上,为保证倾斜仪准确测量出TBM主机的姿态变化,倾斜仪与TBM主机必须保持相对静止,因此,需要采用刚性连接进行固定(支架焊接在TBM主机上,倾斜仪用螺栓可靠固定在支架上),并进行防水、防碰撞的保护措施。
倾斜仪主要作用为测量TBM主机的滚动值(横向滚动,以掘进方向顺时针为正)与仰俯值(纵向坡度,以掘进方向向上为正)。在倾斜仪安装完成后需对倾斜仪初始值进行测量。找到TBM主机的一个理论水平面,分别沿横向、纵向标定2个点,测量2个点的水平距离与高差,并计算出该面的实际滚动值与仰俯值。得到的滚动值、仰俯值单位为mm/m,即千分坡度,应换算成以゜为单位的角度值,但该角度值不是通常的以360゜为一个圆周,而是以400゜为一个圆周进行换算,应引起特别注意。倾斜仪初始值应定期复核,工作中如果倾斜仪发生移动也必须重新测量其初始值。
倾斜仪同时还有数据传输的作用,其4个接口分别为1#与2#马达棱镜接口、电源线接口、数据线接口(与多路器连接,见图1)。
2.1.3 全站仪与后视棱镜
全站仪与后视棱镜的支架固定在隧道洞壁上,全站仪与后视棱镜通过螺栓与支架连接牢固。全站仪电源盒放置在全站仪支架上,为全站仪提供电源并传输数据,电源盒上的3个接口分别为电源盒电源线接口、全站仪连接线接口及无线发射装置接口。全站仪与后视棱镜安装后由人工测量其三维坐标(Y,X,H),采用三角高程传递时应注意,支架上的全站仪与后视棱镜的仪器高应为0。
2.1.4 其他部件
多路器安装在工业电脑附近,起数据传输的作用,其接口分别为多路器电源接口、倾斜仪数据线接口、无线发射装置接口、工业电脑数据线接口。
工业电脑上安装有PPS程序软件,显示PPS导向系统通过自动测量得到的最终结果。
2.2 系统运行
2.2.1 初始参数的输入
PPS程序首次运行前需要输入必要的初始参数。
1)建立隧道理论中线。将隧道中线按1 m的间隔建立中线点,在文本文档中依次输入中线点里程(Station)、东坐标(East)、北坐标(North)及高程(Elevation),在PPS程序软件中导入该文本文档,隧道理论中线即可成功创建。接着创建一个工程文件(Project),定期备份工程文件,在因故障重装系统后导入备份的工程文件即可恢复数据。
2)输入测量参数。依次输入倾斜仪初始值(滚动值 Roll、仰俯值 Pitch、偏航值),1#,2#马达棱镜机器坐标,全站仪与后视棱镜三维坐标(Y,X,H),后视棱镜定位角度(水平角、竖直角)与斜距,1#,2#马达棱镜定位角度(水平角、竖直角)。
输入马达棱镜机器坐标或定位角度时应注意输入顺序与马达棱镜的编号(1#,2#)一致。后视棱镜、马达棱镜的定向角度中的水平角为全站仪直接测量所得,只要后视棱镜与马达棱镜之间的角度差值不变,该水平角可为任意值。一般不应把后视棱镜水平角设为0,否则系统会无法识别。
3)其他参数。剩余待输入参数包括TBM设备定义参数、允许误差范围、纠偏路线最小拐弯半径、屏幕显示参数等,可根据工程的实际要求选择。
2.2.2 运行PPS导向系统
通过PPS程序软件运行整个PPS导向系统,系统开始自动初始化COM接口、多路器、倾斜仪 (含马达棱镜)、全站仪,正、倒镜检查后视方位,测量1#马达棱镜,读取倾斜仪读数,测量2#马达棱镜,完成一个测量循环后程序将测量结果以图形的形式显示出来,并标示出TBM主机机头、机尾的偏移量,建议纠偏路线,TBM刀盘的滚动值、仰俯值,显示当前TBM刀盘中心的三维坐标、刀盘里程、掘进距离等,非常方便。
PPS程序自带检查功能,输入全站仪与后视棱镜坐标及定向角度有误或测量误差引起的后视方位错误程序会自动弹出对话框提醒,并无法运行系统;在正常工作中,意外移动全站仪或后视棱镜造成方位错误,系统在检查后视方位时也会给出警告;同时,每个测量循环系统将全站仪测得的1#,2#马达棱镜距离与根据倾斜仪测得的坡度值反算出的棱镜距离进行比对,超限时显示红颜色的警告,提醒测量人员进行复核。
3 测量误差的控制
3.1 人工因素
PPS的测量工作仍然是以洞内导线点、高程点等控制点为基点的,控制点测量的精度是PPS准确工作的前提,而且PPS日常转站也是由测量人员手动操作,所以测量人员的技术水平是控制PPS测量精度的一个关键因素。
3.2 围岩变形
全站仪及后视棱镜通过支架固定在隧道洞壁上,当围岩发生收敛变形时全站仪及后视棱镜也会发生位移,此时方位误差若未超限,PPS还会继续工作,但误差已经在积累,如图2所示。后视棱镜较全站仪位置较早开挖,围岩收敛速度也较全站仪位置缓慢,随着围岩变形的增大,TBM司机根据PPS程序显示进行掘进,TBM主机也向围岩收敛方向偏移,如果连续几次快速转站 (非控制点转站),则这种误差会越积累越大,且不易被发觉,直到重新从控制点转站后,误差得到修正,PPS程序显示TBM主机位置发生横向突变。
此类误差可采取以下措施减小影响。
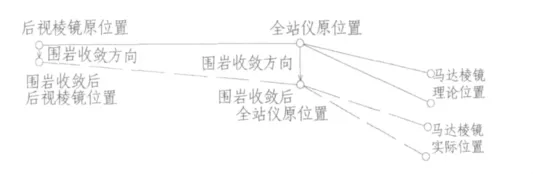
图2 围岩变形影响示意图Fig.2 Sketch of effect of surrounding rock deformation
3.2.1 控制点转站减小围岩收敛影响
PPS导向系统日常转站分为2种:快速转站与控制点转站。快速转站直接以现有全站仪、后视棱镜支架为基点,测量新全站仪支架三维坐标,然后将全站仪移动到新支架上即可;控制点转站以隧道内控制点为基点,测量新全站仪支架三维坐标,然后移动全站仪到新支架上。
快速转站快速、简便,但误差会随转站次数而积累。因此,在围岩变形较大的地段应尽量采用从控制点转站的方法进行作业。
3.2.2 减小每次转站距离
围岩收敛变形随时间增长逐渐积累增大,因此,在相同掘进速度下,缩短转站距离即缩小转站时间间隔,会降低围岩收敛对测量精度的影响。
本工程中,围岩收敛变形较小的地段40~50 m转站一次,在收敛变形大的地段转站距离则减小到20 m左右。如遇TBM停机超过2 d,再次开机掘进前需对全站仪、后视棱镜坐标进行重新复核。
3.3 其他影响测量精度的因素
3.3.1 高温、强光影响
受TBM作业区域限制,全站仪视线有时会穿过高温气体或强光区域,如VFD配电柜上方、电弧焊作业区、强光照明灯等。由于局部温度过高或强光干扰,此时光线穿过会发生折射,造成测量结果偏差;因此,在实际工作中应尽量避免。
3.3.2 灰尘、渗水影响
TBM掘进时刀盘扰动围岩、输送带转碴、喷射混凝土作业等均会产生大量灰尘,尚未遮挡视线时,光线穿过灰尘时会发生衍射,造成测量结果偏差;因此,在实际工作中应保证通风、除尘系统正常运行。
当全站仪视线刚好穿过渗水区时,光线穿过滴落的水滴时会发生折射,同样会造成测量结果偏差,此时应对渗水区进行防水措施处理,如埋设盲管、铺设防水板将水引流。
4 PPS导向系统的日常维护及常见故障的排除
4.1 PPS导向系统的日常维护
PPS导向系统的正常运行离不开日常的维护,测量人员需提高对该工作的重视程度并确保落实到位。PPS系统的日常维护工作主要包括:
1)每天对所有电源线、数据线、无线发射装置进行检查,接头松动的及时拧紧,线路破损的及时更换。
2)每天用专用清洁纸巾清洁马达棱镜镜面、全站仪镜头及表面、后视棱镜镜面。
3)每天检查马达棱镜固定螺栓是否松动,如有松动重新拧紧并复核发生松动的马达棱镜机器坐标。
4)每周对PPS程序数据进行一次备份。
5)每2周对倾斜仪滚动值、仰俯值进行一次校核。6)每4周复核一次马达棱镜机器坐标。
7)每6个月对全站仪进行一次校核。
4.2 PPS导向系统常见故障及排除方法
在PPS导向系统运行中出现的不同故障,可依照程序报错类型大致分类,然后进行排除。
4.2.1 COM 接口初始化错误
当PPS系统程序提示COM接口初始化错误时,首先检查装有PPS程序的工业电脑是否与多路器连接良好,如果连接没有问题,则检查工业电脑连接多路器的COM接口编号是否与PPS系统程序中选定的编号一致,比如工业电脑接口为COM3,则PPS程序中也必须选定相应的COM3。编号无误仍不能初始化COM接口时,尝试拔下工业电脑COM接头,并重新插上(必要时可重新启动电脑)接头,因为某些电脑在非正常关机后重新启动,可能造成系统无法识别接口。如以上情况均已排除,问题仍未解决,则很有可能是COM接口驱动问题,尝试重新更新工业电脑上的COM接口驱动,问题应该就能得到解决了。
4.2.2 初始化倾斜仪失败或读取倾斜仪数据失败
检查倾斜仪电源线、数据线是否破损,接头是否松动,如线路没有问题则可能是倾斜仪自身故障。
4.2.3 棱镜问题
1)关闭1#(或2#)棱镜失败。可能原因为马达棱镜连接线损坏、接头松动或者接触不良、马达棱镜损坏。
2)棱镜错误(Problem with prism)。可能原因为1#(或2#)马达棱镜连接线接头接触时断时续,不能稳定接收系统信号。
3)寻找棱镜错误。可能原因为全站仪与后视棱镜、马达棱镜之间有障碍物阻隔,无法通视。
4.2.4 全站仪问题
1)初始化全站仪错误。可能原因为全站仪电源盒断电、无线发射装置接口松动或损坏、全站仪故障。
2)只有角度测量可用。可能原因为空气粉尘含量过高,影响通视条件,此类情况加强通风即可解决;或者全站仪测距板故障,此类情况需要对全站仪进行检修。
3)全站仪水平出错。可能原因为意外移动支架或者围岩变形导致全站仪竖轴倾斜度超出补偿器补偿范围,全站仪无法工作,重新调平并复核全站仪坐标即可。
4.2.5 后视方位错误
转站工作中输入坐标参数后,弹出对话框提示后视方位错误,并无法运行测量程序,导致该情况出现的原因为输入有误或者转站工作中测量误差超限。
系统运行过程中出现方位错误的提示,则可能是全站仪或者后视棱镜支架意外移动,造成后视方位超限,重新复核全站仪和后视棱镜三维坐标即可。
5 手动测量应急工作模式
手动测量模式是PPS导向系统提供的一种应急工作模式,在系统某些组件损坏无法工作时,可选择相对应的手动模式对TBM进行导向。手动测量共有4种可供选择。
5.1 手动倾斜仪模式
当倾斜仪损坏不能进行滚动值、仰俯值测量时,选择此模式,运行测量程序后按系统提示将人工测得的滚动值与仰俯值(以角度形式输入,详见2.1.2倾斜仪初始值测量的相关说明)输入对话框中,其他工作则由系统自动完成。
5.2 手动全站仪模式
当PPS系统匹配的全站仪不能工作,例如仪器故障或者送专业单位检校时,用其他非PPS系统匹配的全站仪进行替代,系统不一定能够成功识别,此时可选择该模式,运行测量程序,根据提示手动对准后视棱镜(正、倒镜各1次)、马达棱镜进行测量并分别输入对话框中,其他工作由系统自动完成。
5.3 手动全站仪及棱镜模式
当马达棱镜损坏时,用普通圆棱镜进行替代,系统不能控制棱镜打开或关闭,且有可能同时发生5.2中的情况,选择此模式,运行测量程序,根据提示手动对准后视棱镜(正、倒镜各1次)、2个前视棱镜进行测量并分别输入对话框中,其他工作由系统自动完成。
手动全站仪模式与手动全站仪及棱镜模式的区别在于:手动全站仪模式测量时,马达棱镜由系统自动控制打开、关闭,而手动全站仪及棱镜模式则由人工控制前视棱镜朝向或背对全站仪,这一点应引起重视,因为2个前视棱镜距离较近,不能同时全部面向全站仪进行测量,否则2个棱镜同时反射测量激光会导致测量结果不准确。
5.4 全手动模式
此模式仅用于倾斜仪与马达棱镜、倾斜仪与全站仪或者三者同时不能工作时的情况。
选择此模式后,PPS系统已基本瘫痪,运行测量程序后根据提示手动对准后视棱镜(正、倒镜各1次)、2个前视棱镜进行测量,人工测量TBM主机的滚动值、仰俯值,并输入到对话框中,PPS程序仅进行计算工作,并将计算结果以图像的形式显示在屏幕上。
6 结论
由于TBM施工进度很快,PPS导向系统必须能够提供持续、有效、精确的数据作为调整方向的参考标准。这就要求PPS系统必须能够保证良好的工作状态,测量人员需要掌握PPS系统的工作原理,做好日常的维护、保养工作,在出现故障时能够第一时间予以恢复,并在硬件损坏的情况下仍能够提供有效的数据指导掘进。
当遇到较硬围岩时,TBM刀盘掘进时震动很大,长时间的震动会导致马达棱镜损坏,而且损坏频率比较高。关于延长马达棱镜的使用寿命,目前还在试验与探讨中,例如加设缓冲垫层或者对棱镜进行一些改动等,但是方案尚不成熟。
[1] 康宝生.浅谈盾构和TBM的导向系统[J].建筑机械化,2010,31(2):70 -73.
[2] 崔志伟,张晓慧,于英涛,等.TBM激光导向控制在大伙房水库输水隧洞施工中的运用[J].东北水利水电,2007,25(11):13-14.
[3] 王国辉,马莉.TBM隧道掘进中的激光导向系统[J].铁道建筑,2006(6):24-26.
[4] 王世霏,孙永浩,朱玉峰,等.PPS导向系统在TBM中的应用[J].水利水电技术,2006,37(3):31 -33.(WANG Shifei,SUN Yonghao,ZHU Yufeng,et al.Application of PPS orientating system totunnelingwith TBM[J].Water Resources and Hydropower Engineering,2006,37(3):31 -33.(in Chinese))
[5] 申华伟,李丽.激光导向系统在TBM中的工作原理及其影响因素[J].科技情报开发与经济,2007,17(19):196-197.(SHEN Huawei,LI Li.The operating principles and the influencing factors of laser guiding system in TBM:tunnel boring machine[J].Sci/Tech Information Development &Economy,2007,17(19):196 -197.(in Chinese))
[6] 宋瀛道.浅谈锦屏电站引水隧洞TBM施工测量方法[J].铁道建筑技术,2009(11):68-71.(SONG Yingdao.Discussion on the measure method of the TBM construction for the diversion tunnel of Jinping hydropower station[J].Railway Construction Technology,2009(11):68 - 71.(in Chinese))
[7] 赵毅.PPS-TBM导向系统的应用与管理[J].隧道建设,2010,30(1):63 - 66,96.(ZHAO Yi.Application and management of PPS guidance system of TBM[J].Tunnel Construction,2010,30(1):63 -66,96.(in Chinese))
[8] 连杰.浅析TBM施工中激光导向纠偏系统的应用[J].科技信息:科学·教研,2008(14):368.
[9] 中华人民共和国住房和城乡建设部.GB50046-2008盾构法隧道施工与验收规范[S].北京:中国建筑工业出版社,2008:14-15.
[10]中国铁路工程总公司.铁建设[2007]106号 铁路隧道全断面岩石掘进机法技术指南[S].北京:中国铁道出版社,2007:44-49.
