分散控制系统中I/O模件通信实现方法分析
2011-06-13吴胜华王丹麟
吴胜华,王丹麟
(国电南京自动化股份有限公司研究院,江苏南京210003)
1 问题的提出
在分散控制系统(DCS)中往往涉及大量设备状态的监测与控制,这些设备状态可能是模拟量信号输入、模拟量信号输出、开关量输入、开关量输出、脉冲量输入等。在DCS中要设置多个过程控制站,用以分担整个系统的现场I/O模件和控制功能。每个(或1对冗余)过程控制站需要在200ms内完成所有的工作任务,包括自身的各种运算、控制,与冗余控制站之间的数据同步,与数据采集和监视控制系统(SCADA)/人机界面系统(HMI)之间的通信以及与现场800到1000点实时数据的交换。
由于I/O层通信网络对于整个DCS的实时性、可靠性和扩充性起着决定性作用,因此,各厂家在这方面进行了精心设计。对于DCS的I/O层通信网络来说,它必须满足实时性的要求,即在确定的时间内完成信息传送。“确定的时间”是指无论在何种情况下信息传送都能在该时间内完成,而该时间是根据被控制过程的实时性要求确定的。对于实用的大中型分散式控制系统来说,要求每个(或1对冗余)过程控制站完成1个运算周期及数据交换的时间在200ms以内。因此,衡量系统网络性能的指标并不是网络的速率,而是系统网络的实时性,即能在多长时间内确保所需信息传输完成。系统网络必须可靠,无论在何种情况下,网络通信都不能中断。另外,为了满足系统扩充性的要求,系统网络上实际使用的节点数只应占可接入最大节点数的60%~80%。这样,一方面可以随时增加新的节点,另一方面也可以使系统网络运行处于较轻的通信负荷状态,以确保系统的实时性和可靠性。在系统实际运行过程中,各个节点上网和下网随时可能发生(特别是各种I/O模件),会经常进行网络重构,而这种操作绝对不能影响系统的正常运行,因此,系统应该具有很强在线网络重构功能。
2 实现方法
在DCS设计中,过程控制站和现场I/O模件之间通信的实现方式主要有4种。
2.1 方法1
第1种实现方法如图1所示:设计专用智能通信处理模件(CP模件)来主动实现分配到本站内所有I/O模件的数据交换;DPU和CP模件通过DPRAM方式实现所有输入、输出数据的交换,DPU在逻辑运行前读入输入数据,并在逻辑运行完毕后输出数据。

图1 第1种实现方法网络架构图
优点:DPU可以不用执行和I/O模件的通信及报文解析任务,降低了DPU的负荷;和I/O模件的数据交换通过类似于内存访问的模式实现。对现场数据的响应时间最快只要求到50ms(汽轮机相关控制),因此,对I/O层通信速率要求不高,通常RS485或者CAN总线即可满足要求。
缺点:需要专用模件(CP模件)支撑,会增加一定的成本;对DPRAM的读写存在一定几率的冲突,需要一定的读写时序来配合逻辑的实现;现场数据的响应时间随着I/O模件的接入数量而变化。
国内研制的大部分DCS均采用此实现方式。
2.2 方法2
第2种实现方法如图2所示:DPU自身实现与现场I/O模件之间的通信以及报文解析任务。
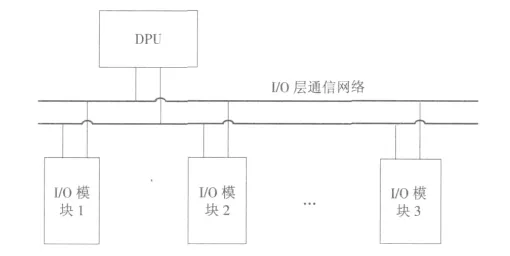
图2 第2种实现方法网络架构图
优点:网络架构简单,一网到底,没有中转环节。
缺点:DPU自身需要完成逻辑控制、实现与SCADA之间的通信、和冗余DPU之间的数据同步、和其他过程控制站之间的通信等任务,还需要增加处理与现场I/O模件之间通信以及报文解析的任务。因为增加的这个任务在一个控制周期(典型值200ms)内要执行多次,平均执行周期为200ms/模件,所以,大大增加了DPU的负荷。
DL/T1083—2008《火力发电厂分散控制系统技术条件》中要求:控制处理器设定在满足控制对象要求的运算处理周期条件下,负荷率最高不应大于60%,平均负荷率不超过40%。基本没有DCS采用此类实现方法。
2.3 方法3
第3种实现方法如图3所示:整个网络中分配数个CP模件(数量为1~6),每个CP模件下挂数个I/O模件(数量为1~16),各CP模件负责实现与下挂在各自I/O通信总线上的I/O模件之间的通信,DPU实现和各CP模件之间的通信。

图3 第3种实现方法网络架构图
优点:现场I/O模件的响应时间比第1种方法大大提高,最慢响应时间可事先确定,基本为16个I/O模件的通信响应时间;与第2种方法相比,DPU虽也处理与现场I/O模件之间的通信以及报文解析任务,但在一个控制周期内执行此任务的次数大为降低,最多执行6次,对DPU的负荷影响不大。
缺点:DPU和CP模件之间以及CP模件和I/O模件之间的通信协议不一样,增加了研制的难度,成本比第1种实现方法略高。
综合比较,此实现方法性价比较高,国外DCS基本采用此类实现模式。
2.4 方法4
第4种实现方法如图4所示:其与第3种实现方法唯一的区别是增加了1个主CP模件来管理各个子CP模件;此方法结合了第1种及第3种实现方法的特点。
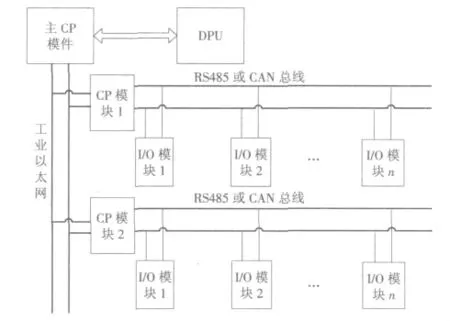
图4 第4种实现方法网络架构图
优点:与第1种实现方法相比,此实现方法DPU负荷相同,但I/O模件的响应速度大大提高;与第3种实现方法相比,I/O模件的响应速度一致,DPU负荷略有降低。
缺点:和I/O模件之间的通信通过两级CP模件管理实现,DPU对I/O模件的组态实现比较复杂;操作时序以及故障判断的复杂性大为增加。
有部分DCS采用此实现方法,但用者较少。
3 结论
通过列举过程控制站和现场I/O模件之间通信的4种实现方法,从实时性、经济性及实现的难易程度等方面进行了分析。参照上述分析结果,用户可以根据具体应用场合的不同而选择合适的DCS。
