一种PID模糊控制器
2011-06-04中船重工集团第710研究所湖北宜昌443003
蒋 平(中船重工集团第710研究所,湖北 宜昌 443003)
在控制系统中,控制策略的研究与选择是控制器的核心,控制算法直接决定了系统的稳定性、快速性和鲁棒性,系统的性能指标很大程度上取决于控制算法的优良与否。随着现代控制系统越来越复杂,精度要求也越来越高,传统、单一的控制策略已经无法满足设计性能的要求,同时,随着电子技术和计算机的发展,基于计算机的越来越多的智能算法也不断涌现,将传统算法和智能算法相结合,成为现代控制系统策略选择的趋势。
传统的PID控制算法具有算法简单、精度高、可靠性强的优点,且技术成熟、应用广泛,目前世界上80%以上的工业控制器都采用PID控制。然而,现代化的控制系统一般都具有非线形和负载时变等特征,其准确的动力学模型难以建立,而PID控制亦无法摆脱系统非线形和参数变化的影响。
90年代以来,一些学者开始研究和分析模糊控制,从理论上认真研究并完善模糊控制的本质特性,分析模糊控制器各设计参数对控制性能的影响,成为智能控制领域研究的一个热点,形成了传统PID控制加模糊控制这一新的理论研究方向,并已经在理论和工程应用领域取得了一些有价值的研究成果。
1 PID控制器
PID控制器其输入e(t)与输出u(t)的关系为:

(1)式中,Kp为比例系数,Ti为积分参数,Td为微分常数,Uo为控制常量。
数字PID控制算法通常分为位置型和增量型两种,目前应用较多的是增量型,其原理是对PID控制器做如下近似变换:
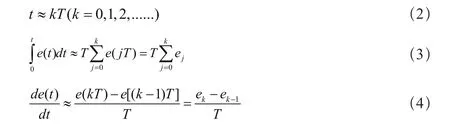
将类似于e(kT)简化成ek,得到离散的PID表达式为:

2 模糊PID控制器
本文介绍的是二输入,三输出的模糊控制器,以误差e和误差变化率ec为输入,PID控制器参数调整量,为输出量,其控制原理如图1所示。
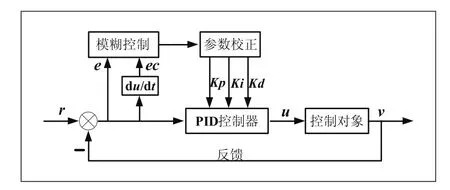
图1 模糊PID参数自适应控制器原理图
根据参考文献,对不同的e和ec调整PID控制器参数的规律如下:
(1)Kp增加振荡周期减小,超调增加,上升时间减少。
(2)Ki增加则超调/回调比增加,稳定性下降; 减小则超调下降。
(3)Kd增大则稳定性增加。
(4)当系统输出超过设定值时,减小Ki,当系统上升时间大于要求的上升时间时,增加Ki;在稳态时,系统输出产生波动现象,适当增加Kd,系统输出对干扰信号反应灵敏,适当减小Kd;上升时间过长,增加Kp,系统输出发生振荡现象,减小Kp。
(5)根据专家经验,当系统在常规控制作用下,误差e和误差变化率ec越大,系统中不确定量就越大;相反,误差e和误差变化率ec越小,系统中不确定量就越小。利用这种e和ec对系统不确定量的设计,就可实现对PID三个参数的调整估计。
3 模糊控制规则
在判定控制规则模型时,既要兼顾减小超调、提高系统响应速度,同时系统稳定的提高更为重要。控制品质分析的重要依据是系统的响应曲线,如图2所示。
(1)当输出响应位于区间Ⅰ时,起始较大,E(k) > 0,EC(k)< 0,输出趋向给定值;
(2)Ⅱ阶段,起始较大,E(k) < 0,EC(k) < 0,输出远离给定值;
(3)Ⅲ阶段,起始较小,E(k) < 0,EC(k) > 0,输出趋向给定值;
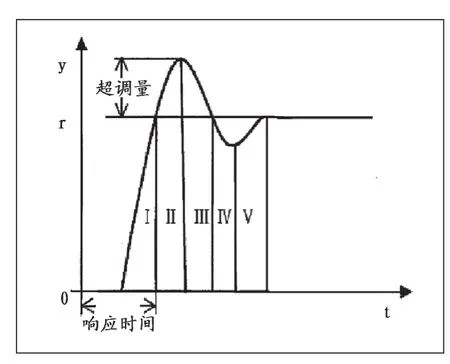
图2 系统输出响应曲线
(4)Ⅳ阶段,起始较小,E(k) > 0,EC(k) > 0,输出远离给定值;
(5)Ⅴ阶段,起始较大,E(k) > 0,EC(k) < 0,趋向远离给定值。
传统的PID控制最主要的问题是参数整定问题,一旦整定计算好后,在整个控制过程中都是固定不变的,而在实际系统中,由于系统状态和参数等发生变化时,过程中会出现状态和参数的不确定性,系统很难达到最佳的控制效果。模糊PID控制就是利用当前的控制偏差和偏差的变化率,结合被控过程动态特性的变化,根据控制要求或目标函数,建立用if-then产生式语句规则所表达的调整模型,对PID控制器的三个参数进行调整。
设置偏差E和EC所取论域为(NB,NM,NS,ZO,PS,PM,PB),即划分为7个区域,所取隶属函数为三角函数,利用前人经验总结得模糊规则如下:
(1)if(E is NB)and (EC is NB) then (Kp is PB) (Ki is NB)(Kd is PS) and
(2)if(E is NB)and (EC is NM) then (Kp is PB) (Ki is NB)(Kd is NS) and
(3)if(E is NB)and (EC is NS) then (Kp is PM) (Ki is NM)(Kd is NB) and
……
(4)if(E is PB)and (EC is PB) then (Kp is NB) (Ki is PB) (Kd is PB)
4 仿真与研究
选取常规的PID控制和PID模糊控制进行仿真分析,对比常规的PID控制系统响应曲线得出结论, 控制对象选择实际控制中常见的二阶加时延对象,其传递函数为:

从过程检测角度上讲,很多过程控制对象都可用上述模型来近似描述,不需要建立准确模型,通过模糊PID控制也可以取得良好的效果。
模糊PID控制系统结构仿真框图如图3所示,模糊论域分别为E(-0.5,1),EC(-0.8,0.5),隶属函数的类型为三角型,模糊推理采用Mamdani法,解模糊法采用重心法,Kp(-0.02,0.01),Ki(-0.02,0.04),Kd(-0.008,0.004),比例因子以及量化因子均取1。
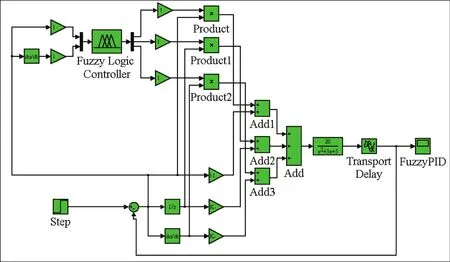
图3 模糊PID控制仿真结构
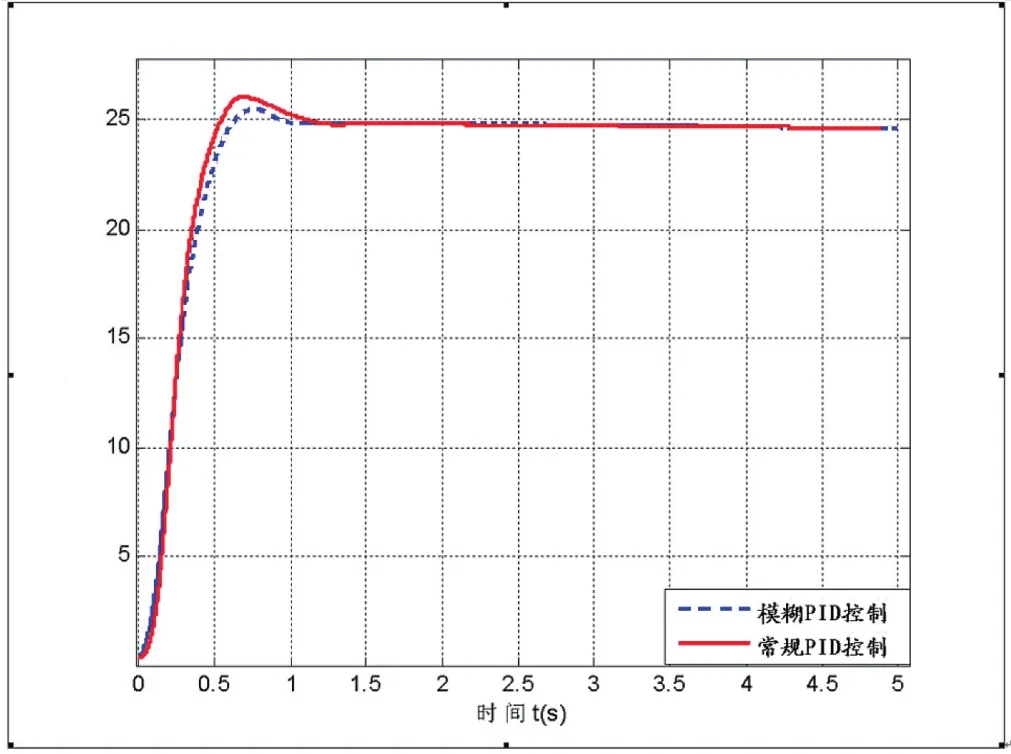
图4 阶跃响应输出波形
对比常规PID和模糊PID仿真所得的曲线(如图4)可以发现,采用模糊控制方法整定PID参数相对于常规PID控制器,其系统的稳态性得到一定的改善,响应时间也有所减少,超调量也得到较大的改善。仿真结果证明:利用模糊控制对PID控制器的参数进行实时整定,进一步提高了系统的精度,增加了系统的在线自适应能力。
5 结语
本文提出了一种基于PID模糊控制的控制系统,将PID控制器的输出误差作为输入,用模糊控制器来调整PID控制器的参数,这种控制方法提高了系统的精度,仿真实验结果表明,该控制器具有很好的动静态性能,是一种行之有效的控制器。
[1] 林辉. 高精度舵机控制器的研制[J]. 西北工业大学硕士论文. 2006.
[2] 王先来. 模糊PID控制器的设计研究[J]. 天津: 天津大学硕士论文. 2005.
[3] 闻新, 周露等. Matlab模糊逻辑工具箱的分析与应用[M] . 北京: 科学出版社. 2002.
[4] 章卫国, 杨向忠. 模糊控制理论与应用[M]. 西安: 西北工业大学出版社.
[5] 李卓, 萧德云, 何世忠等. 基于Fuzzy推理的自调整PID控制器[J]. 控制理论与应用. 1997, 14.