基于红外阵列传感器的数据融合技术
2011-05-06吴军军梁炎明宋念龙
李 琦,吴军军,梁炎明,宋念龙,邓 毅
(西安理工大学自动化与信息工程学院,西安710048)
空气预热器(简称空预器)是利用锅炉尾部烟气热量来加热锅炉燃烧所用空气的一种控热设备。国内200 MW以上机组锅炉通常采用结构紧凑、重量较轻、节约场地、布置方便的回转式空预器[1]。空预器受热面上积存的过量燃料经氧化升温,达到着火温度就会导致空预器本身的燃烧事故。初期着火范围较小,很难被发现[2]。当元件温度继续上升至700℃时,就足以导致钢制蓄热元件起火,这时的火灾就很难扑救了[3]。现有检测方法及其缺点:①热电偶检测系统,不能及时反映出空预器表面的详细温度信息;②移动探头式检测系统采用红外测温原理。虽然解决了热电偶系统存在的问题,但其仍然存在机械装置在高温情况下不断往返运动,机械装置容易出现卡死的现象;其报警方法采用阈值判断,容易出现漏报和误报的缺点[4];以及其完成一个空预器表面检测需要几十个空预器的旋转周期,检测时间较长等问题。针对现有检测方法存在的问题,本次设计采用N个红外传感器分布于空预器空气侧的半径方向上,实时的扫描空预器的受热面,从而获得其温度场的分布规律,并在此规律的基础上分析空预器表面的温度变化趋势。最后,将这些变化趋势的信息融合起来。本次设计的优点:①采用固定式结构,避免了机械装置的卡死现象;②基于温度变化趋势分析的判警模型,不需要设定阈值;③检测一个完整的空气预热器表面仅需空预器的一个旋转周期,实时性大为提高;④采用红外阵列检测,不仅具有单个红外探测器的测温原理和技术指标[5],而且可以同时检测到多点信息,能够及时反映出预热器表面的详细信息。
1 概述
1.1 红外阵列描述
本次设计采用固定式红外阵列结构,如图1所示。一个红外阵列探头包含有七个红外传感器。每个红外阵列探头内用DSPIC30F3014单片机将七路红外信号采集后传输给嵌入式工控机进行数据融合及决策。系统均匀分布L个红外阵列探头(具体数量根据空气预热器的功率而定)在空气预热器的空气侧下方半径方向,这样随着空气预热器旋转一周即可以完成空气预热器整个表面的温度检测。
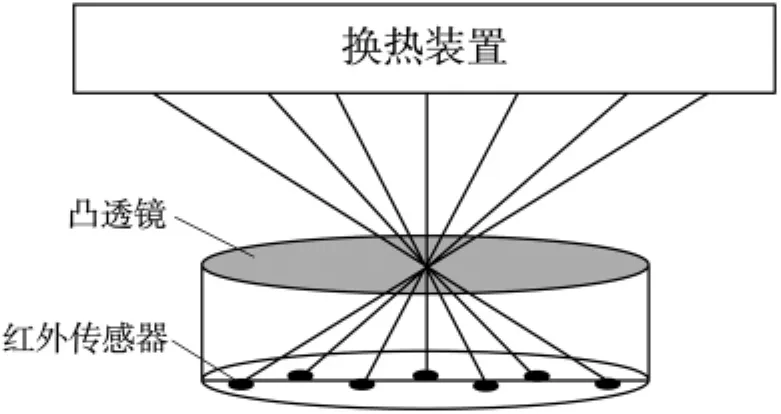
图1 红外阵列结构图
假设每个红外阵列探头的检测范围为M,则需L个红外探头均匀分布在半径方向,L=R/M(R为空气预热器的半径)。L个红外探头内又分别含有7个红外传感器,这样就相当于7×L个红外传感器分布于空预期的空气侧半径。设N=7×L,则系统可抽象为如下的模型,如图2所示。
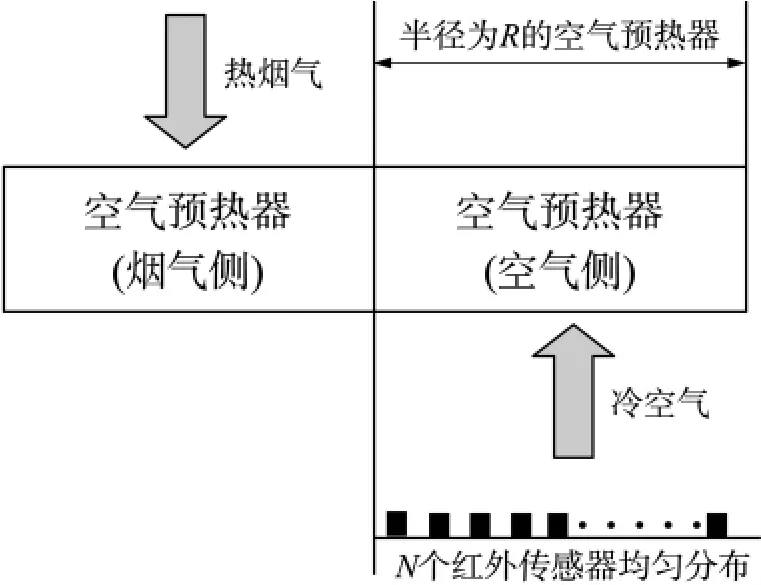
图2 空气预热器原理图及红外传感器位置
1.2 数据融合方法概述:
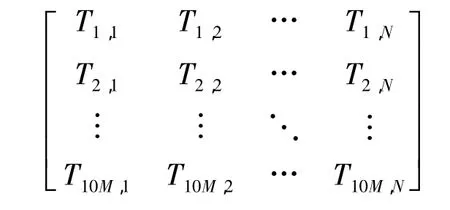
空预器内蓄热元件的温度变化以及温度场的分布可以反映空预器受热面上火灾发生隐患-热点的分布情况。因此找到空预器的温度分布规律、采用合理的检测手段和融合方法至关重要。将空气预热器一个周期的数据用一个矩阵来表述。1~N表示N个红外传感器。1~10M表示一个周期Ms内每0.1 s采样一次得到的相应数据。
将矩阵每一列的数据的平均值和其对应的位置作为输入,拟合出一条曲线作为参考的空气预热器空气侧的径向温度分布规律,将高于这条曲线一定程度的测点认为是奇异点。根据现场经验,火灾的发生是从空气预热器表面某一点开始,然后向四周蔓延的。这些着火部位的温度将明显高于相应位置的参照温度。
提取火灾发生的特征:横向特征 看一个周期内是否有蔓延的趋势,即两边的传感器是否存在支持这一热点的证据;纵向特征 看紧接着几个周期内的检测值是否是支持它为热点的证据。最后将这些证据利用D-S证据理论将其有机的融合起来。
本系统采用多级融合技术,如图3所示:①参考温度计算 求空预器的温度分布规律,并计算每个传感器的不确定度;②特征提取并计算BPA(基本概率赋值) 以温度分布规律为参照提取火灾特征,并根据提取的特征计算各个传感器对应的BPA;③证据融合 将着火可能性最大的那个红外传感器找出来,将它和它周围传感器以及这几个传感器未来几个周期的证据用D-S证据理论融合,得到最终的输出。
设V表示X所有可能取值的一个论域集合,且所有在V内的元素间是互不相容的,则称V为X的识别框架。
定义1设V为一识别框架,则函数m:2V→[0,1](2V为V的所有子集构成的集合)满足下列条件:
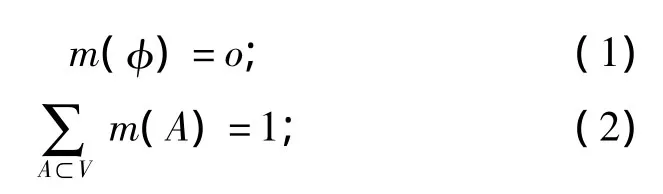
则称m(A)为A的基本概率赋值(BPA)[6],表示对命题A的精确信任程度,表示了对A的直接支持。
由于每一个传感器对应一个u值,每个u值对应这一传感器给出的着火可能性大小。每个证据对应的u值在0和1之间,且越靠近0着火可能性越小,越靠近1着火可能性越大,并且有火灾,无火灾和不确定度概率之和也为1,所以将每个传感器的u值(按式4计算u值)作为相应传感器有火灾证据的BPA。
2 寻找空气预热器的温度分布规律
理想的空预器热点检测系统应能随时检测空预器内部的温度场分布[7],所以及时准确的找到空预器的温度分布规律至关重要。空预器的温度分布总体可以叙述如下:空预器的烟气侧的温度将高于空气侧的温度;在空气侧,冷空气从下面上来,所以空气侧下面的温度将低于上面的温度[8]。
定义2将检测位置离预热器中心最近的传感器序号定义为1,最远的定义为 N,中间的依此类推。yi对应第i个传感器在一个空预器周期内的温度值均值。

表1 用于拟合温度分布曲线的数据
将表1中对应的两行数据(xi,yi)作为输入,用n次曲线 f(xi,yi,n)拟合出两者之间的关系来,f(xi,yi,n)=anxn+an-1xn-1+ … +a0。根据现场数据分析我们知道,空气侧半径方向上的温度分布如下:从预热器轴中心到外壁,温度先从低到高,有一个升高过程,然后趋于平稳,到外壁时温度再从高到低有较大幅度的降低。由此分析这条温度分布曲线有两个拐点存在,所以最少应选用三次曲线拟合。
定义3某个传感器拟合得到的温度分布规律曲线为 D,D=f(xi,yi,n)
定义4n个传感器的拟合值和实际测量值之间的平均误差定义为W,
将空气预热器正常运行时空气侧径向的一组数据进行不同次幂的曲线拟合后求得的平均误差列表,如表2所示。从表中发现,随着拟合次数越来越高,误差越来越小。但是,当次数n高于6时,其误差已无明显变化。考虑到系统的运算速度和更高次曲线拟合的复杂程度会给设备带来更高的要求,本次设计最终选择6次曲线。
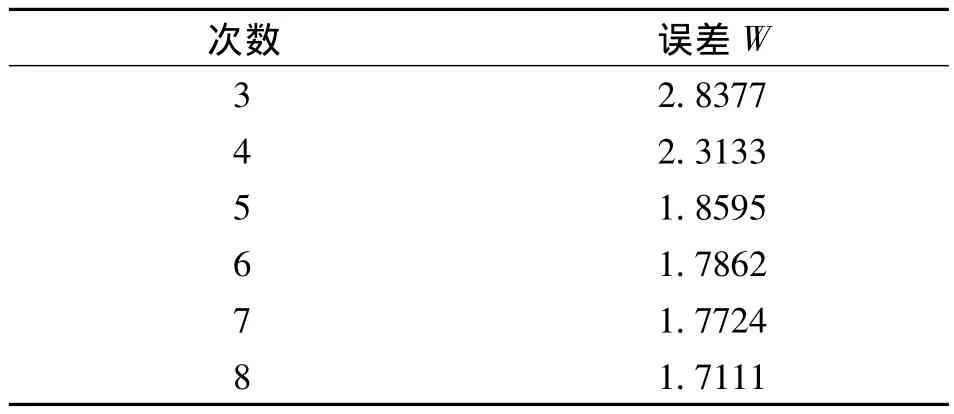
表2 不同曲线误差
然而,多长时间拟合一次温度分布曲线也是不易确定的,本次设计的系统具有自我调节的能力。系统根据实际情况判断之前拟合的温度分布曲线是否还能够较好的反映出现在的温度分布规律。具体的解决方法就是:根据不断变化的误差W值来判断之前的拟合曲线是否还能够较好的反映出现在的温度分布规律。如果W大于某一个值Wt时,系统将从新开始拟合一条和现在温度分布规律一致的温度分布曲线来,从而达到自适应的目的。
本系统的判断是基于温度分布规律来判断温度高低程度的。跟实际的准确温度值并无直接关系,而仅仅与测量值和温度分布规律的相对变化量有关。定义第 i个传感器的相对误差为 Ei,Ei= σi/f(xi,yi,n)。其中还定义了本系统中第i个传感器的绝对误差σi为实际测量值和理论参考温度值之间的偏差,即σi=|f(xi,yi,n)-yi|。Ei的大小直接反映了第 i个传感器的不确定度,这将直接影响到数据融合中对第i个传感器的信赖程度。将现场数据按六次曲线拟合后发现系统正常运行时的最大不确定度为0.141 3。所以当Ei大于某一值EE时我们就有理由认为i号传感器出现故障,并发出相应的故障报警信号。
3 特征提取及BPA计算
将单个红外传感器的温度归一化。N个红外传感器实时扫描,当某个红外传感器某时刻的检测温度比温度分布规律D高出1/2倍的Vt度时,认为其是可疑热点。
同时计算N个传感器的u值,对比各个奇异点对应的u值,取u值最大的传感器作为数据融合的中心。假设第i号红外传感器的u值最大。那么就先看横向特征,临近的传感器是否也支持这个奇异点。如果第i号红外传感器相邻的红外传感器也检测到这一奇异点,则也认为其是支持这一奇异点的证据。注意:当某一个传感器的不确定度大于EE,即认为此传感器出现故障时,我们的融合将自动跳过这个传感器。例如,当i+1号传感器出现故障时,我们将跳过i+1号取i+2号传感器作为i号传感器的紧邻传感器来进行处理。纵向特征:看紧接着的几个周期是否也支持这一证据。如果第i号红外传感器紧跟着的几个周期也检测到这个奇异点,则认为其也是支持这一热点的证据。(注:必须是相邻的周期)。
4 D-S证据理论融合
证据理论是由Dempster于1967年首先提出,由他的学生Shafer于1976年进一步发展起来的一种不精确推理理论,也称为Dempster/Shafer证据理论(D-S证据理论),属于人工智能范畴,最早应用于专家系统中,具有处理不确定信息的能力。作为一种不确定推理方法,证据理论的主要特点是:满足比贝叶斯概率论更弱的条件;具有直接表达“不确定”和“不知道”的能力。
在医学诊断、目标识别、军事指挥等许多应用领域,需要综合考虑来自多源的不确定信息,如多个传感器的信息、多位专家的意见等等,以完成问题的求解,而证据理论的联合规则在这方面的求解发挥了重要作用。
定义5设V为一识别框架,则函数m:2V→[0,1]是V上的基本概率赋值,定义函数BEL:2V→[0,1]为:

称该函数是V上的信任函数[9]。
定义6设BEL1和BEL2是同一识别框架V上的两个信任函数,m1和m2分别是其对应的基本概率赋值,焦元分别为 A1,…Ak和 B1,…Br,又设
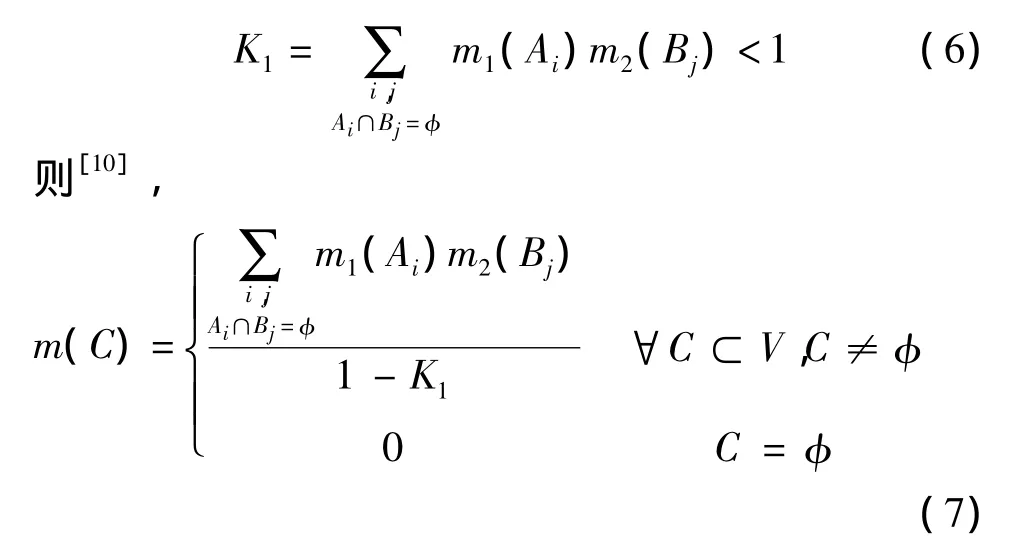
在上面式子中,若K1≠1,则m确定一个基本概率赋值;K1=1,则认为m1、m2矛盾,不能对基本概率赋值进行组合。定义6给出的证据组合规则满足结合律和交换率,对于多个证据的组合,可以采用定义6的组合规则对证据进行两两综合[11-12]。
基于基本概率赋值的决策:设∃A1,A2⊂V,满足
则A1为判决结果,其中ε1,ε2为预先设定的门限。
由于每个传感器独立采集其检测区域的温度状态,同一传感器在不同周期对同一点的温度采集也是独立完成的,所以可以确认每个传感器之间的数据是不相关的,同个传感器在不同周期的检测数据也是不相关的。
假设,将u值输出最高的i号传感器和两边的i-1,i+1号传感器,合计三个传感器的三个周期的证据运用D-S证据融合,融合数据的信息如表3所示。
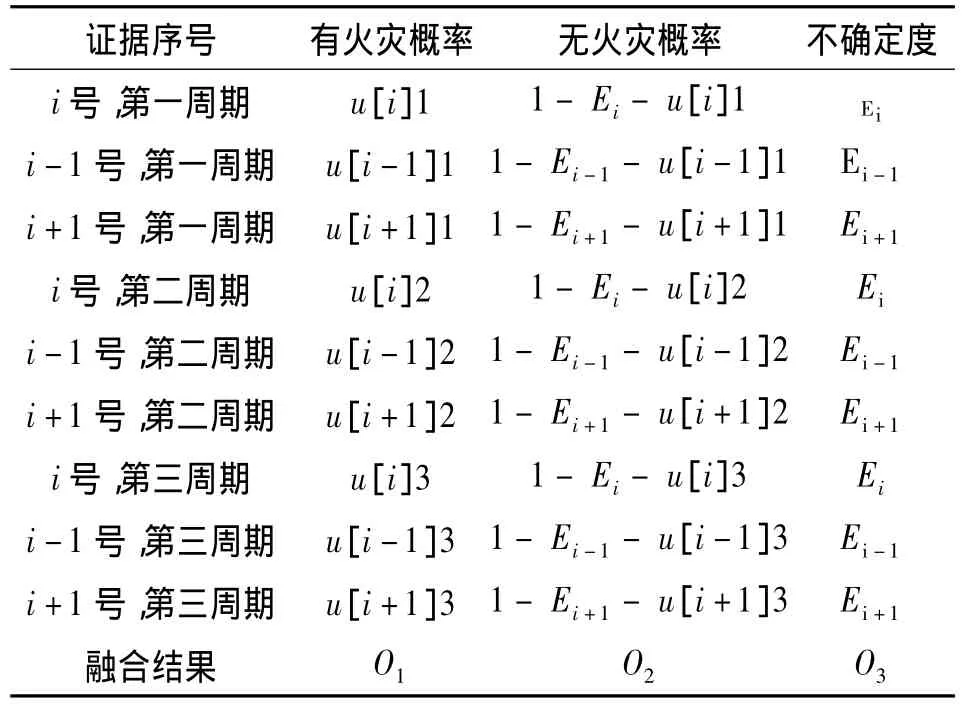
表3 用于融合的证据列表
在具体融合的过程中,我们利用循环算法,先将1,2两行的证据进行融合,将融合结果再与第三行融合,依此类推,直至将九个证据完全融合后,输出结果如最后一行所示:最终有火灾概率是O1,无火灾概率是O2,不确定度是O3。
5 试验及分析
为了验证以上理论的正确性,在空预器模型内建立了模拟试验环境。按空预器正常工作时,原移动式系统的单红外探头检测值一般在150℃ ~160℃波动的现场经验,本次试验设定空预器模型的背景温度在150℃~160℃范围内;设定模拟热点产生在3号传感器检测位置处,模拟热点是一不间断加热的一块铁板使其温度逐步升高,其直径为热点最小检出直径。实验的目的是检验系统能否及时有效地检测出这个相对于温度分布规律不断升高的奇异点。为了能够与红外阈值报警系统方法进行比较,在3号传感器检测部位的正下方同时放置了原移动式系统的单红外探头同时检测此热点的变化。实验过程中当单红外探头检测值升到179℃时,本系统已经决策判断出此奇异点为一热点,并发出了相应的报警信号。此时数据记录如表4所示,最终有火灾概率是0.576 087 820 429 17,无火灾概率是0.423 909 804 378 28,不确定度已经降低到了0.000 002 375 192 57。预先设定 ε1= ε2=0.001,m(A1)-m(A2)>ε1,不确定度 m(V)<ε2,且 m(A1)>m(V)以上三条决策条件都满足,发出相应的报警信号。表4中,3号传感器有火灾的概率最大,所以也正确的判断出热点所在位置是3号传感器在报警时对应的预热器位置。而此时与之相比较的阈值报警传感器而无报警信号发出(由于电厂的红外阈值一般设定在200℃左右,视具体工况而定)。为了充分验证系统的性能,改变热点和单红外探头位置后重复进行了两次上述实验,本系统将这两热点都及时检测出来,报警时单红外传感器的检测值分别为184℃和176℃,相应的阈值报警传感器无一报出。
实验表明:本系统发出热点报警时对应的热点温度均较普通阈值报警时的温度值低,因此可以减少温度升高对预热器的损害;由于本系统产生的报警信号需要来源于数个传感器在不同时间的测量数据,因此可以排除由于单个传感器漂移引起的误报警;实际应用中移动探头式检测设备其完成一个完整的空预器表面检测需要大概20个空预器旋转周期,而红外阵列系统却能在一个空预器旋转周期完成其表面温度检测。因此,本系统(基于红外阵列和温度分布规律的融合方法)的决策结果能在阈值报警方法之前及时、有效的检测出热点,发出报警信号,从而可以避免热点温度不断升高、不断扩大给预热器带来的损害。
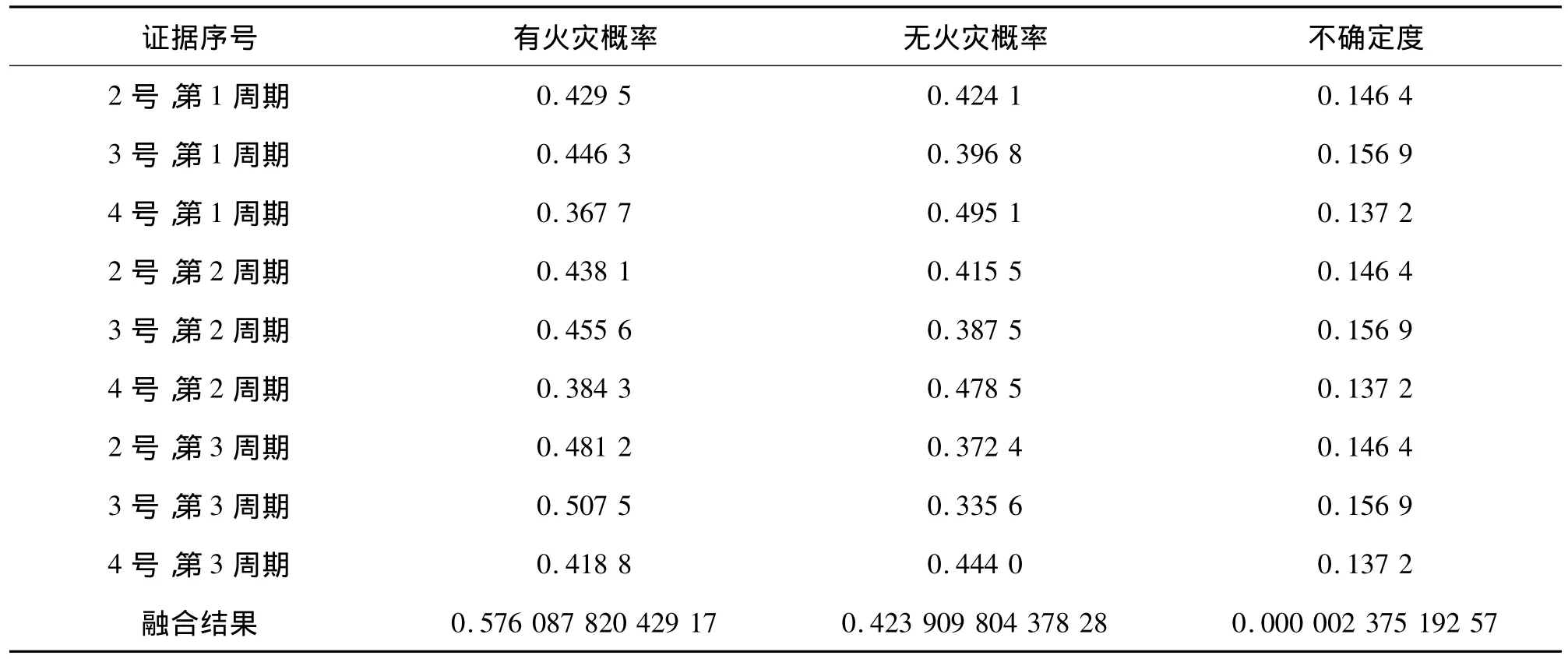
表4 数据融合后的证据列表
6 结论
本文提出了基于红外阵列传感器的数据融合方法。其克服了热电偶检测系统不能检测到空气预热器详细信息的缺点;克服了移动式红外传感器检测系统检测周期长,机械装置容易卡死等问题。在融合方法方面:本系统对火灾的检测是基于自适应的温度分布规律进行的。经实验证明:此融合方法能够在阈值报警方法之前及时、有效的检测出热点的存在。不仅克服了阈值报警中,阈值的设定过多的依赖于经验和现场工况,容易出现漏报警和误报警的缺点,而且具有自诊断、自适应功能,大大提高了系统的智能化。本系统能够以温度分布规律为参照,估计每个红外传感器检测点的温度状态,然后利用D-S证据理论将多个红外传感器给出的状态有机的融合起来,达到了降低红外传感器不确定度的目的,使系统的可靠性大为提高。
[1]刘涵,刘丁,李琦,等.电站锅炉空气预热器火灾报警系统的研究[J].电子技术应用,1998,24(6):35 -36.
[2]殷国东.回转式空气预热器的热点探测系统[J].汽轮机技术,2003,45(6):137 -138.
[3]王志强,高崇辉,鞠盛武.空气预热器热点检测系统[J].电站系统工程,1996,12(2):60 -62.
[4]徐鲁.邹县三期空气预热器热点检测系统[J].山东电力技术,1996,(5):53 -54.
[5]孟繁兵,刘大俊,牟郁慧,等.回转式空气预热器热点在线检测系统的研究[J].黑龙江电力技术,1997,19(6):331 -334.
[6]孙洁娣,温江涛,靳世久.基于D-S证据理论的管道安全监测数据融合技术的研究[J].传感技术学报,2007,20(2):402 -407.
[7]王洪跃.回转式空气预热器动态特性及控制策略研究[D].东南大学,2005:11 -17.
[8]Qu Dongcai,Meng Xiangwei,Huang Juan,et al.Research of Artificial Neural Network Intelligent Recognition Technology Assisted by Dempster-Shafer Evidence Combination Theory[C]//7th International Conference on Signal Processing,2004 Volume 1,31 Aug.-4 Sept.2004:46 -49.
[9]姚伟祥,吴龙标,卢结成.用模糊神经网络进行火灾探测[J].信号处理,2000,16(1):61 -70.
[10]Xu Lijia,Chen Yangzhou,Cui Pingyuan.Improvement of D-S Evidential Theory in Multisensor Data Fusion System[C]//Proceeding of the 5th World Congress on Intelligent Control and Automation June 15 -19,2004,Hangzhou,P.R.China:3124 -3128.
[11]何友、王国宏,陆大金,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007:40-47.
[12]刘涵,李琦,刘丁,等.基于最小二乘支持向量机的电站锅炉空预器热点检测系统研究[J].中国电机工程学报,2005,25(3):147-151.
[13]韩崇昭,朱洪艳,段战胜,等.多源信息融合[M].清华大学出版社,2006:157 -193.
