多功能自确认传感器*
2011-05-06赵树延
王 祁,赵树延,宋 凯
(哈尔滨工业大学电气与自动化学院,哈尔滨150001)
传感器是信息获取的源头,目前各种测试设备和自动化系统中使用的传感器数量和种类越来越多。在很多应用场合中,需要同时监测多个物理量,例如在矿井中经常需要同时监测温度、湿度、一氧化碳、甲烷等气体成分;在潜艇等密闭环境中需要同时监测温度、湿度、风速、一氧化碳浓度等。为了使用方便,人们希望能用尽量少的传感器测量多个物理量,这种需求促进了传感器向多功能的方向发展。如芬兰的VAISALA公司推出的多功能天气传感器WXT520能够同时测量六种物理量,包括风速、风向、降水量、压力、温度和相对湿度;2000年美国BELL实验室Dodabalapur和意大利Bari大学的Torsi研制了一种基于有机薄膜晶体管(OTFT)的多功能气体传感器,通过测量有机薄膜晶体管的电导率、晶体管门限电压和有效迁移率来敏感不同气体,实现多参数测量[1]。
多功能传感器可以有多个敏感元件集成在一个基板上,也可由多个传感器复合而成。由于多功能传感器测量的参数多,其结构较普通传感器的结构复杂,因此发生故障的概率也随之增大。传感器一旦发生故障,输出错误数据,就会影响系统工作,甚至造成灾难性后果。因此人们希望了解传感器的工作状况是否正常,对不可靠的传感器及时更换;同时希望当传感器发生故障时,不输出错误数据,以保证系统正常运行。
自确认传感器是牛津大学的Henry和Clarke教授在1993年提出的一种新型传感器,它不仅能输出测量值,同时能够对自身的工作性能、状态进行在线评估[2]。但目前所研究的自确认传感器大都是针对一种测量参数进行的,如自确认数字科里奥利流量计[3]、自确认压力传感器[4]等。
为了解决多功能传感器的工作状态确认和数据恢复问题,本文综合多功能传感器和自确认传感器概念和方法,提出多功能自确认传感器。多功能自确认传感器具有这两种传感器的功能和特点,它最大优势在于可利用被测的多种参数之间的相关信息和冗余信息进行状态评估和数据恢复。本文将介绍多功能自确认传感器的概念,并给出了其功能模型和实例。
1 多功能自确认传感器的概念及其功能模型
多功能自确认传感器具有多功能传感器和自确认传感器的特点。多功能自确认传感器可以检测多个物理量,它在输出测量值的同时,能够对传感器的工作状态进行在线评估,并以不确定度的形式指示出当前输出的测量值所在的准确度范围;它具有故障自诊断功能,当传感器自身发生故障时,不仅检测出传感器的故障,判断故障类型,同时能够对输出值进行最佳估计,并以估计值替代故障数据输出,通过数据恢复以保障多功能自确认传感器在一段时间内的正常输出。多功能自确认传感器的功能模型如图1所示。
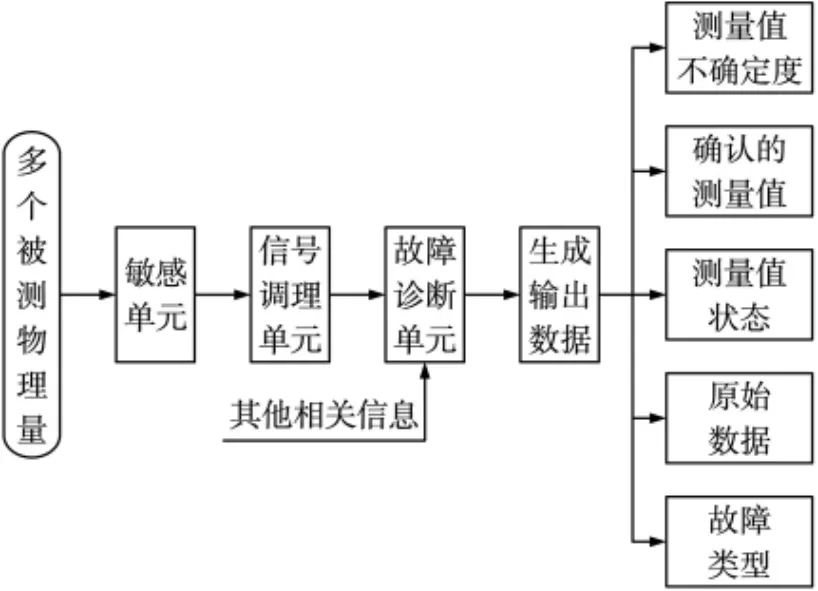
图1 多功能自确认传感器的功能模型
多功能自确认传感器按功能分可以分为四个单元:敏感单元、信号调理单元,故障诊断单元和生成输出数据单元。
(1)敏感单元:由多个敏感元件在一个基板上集成或多个传感器复合而成,检测多个不同的物理量。
(2)信号调理单元:这部分主要是对敏感单元输出的信号进行放大、滤波、A/D转换等。
(3)故障诊断单元:利用相关的信息和算法对传感器的状态进行评估和诊断,确认多功能自确认传感器的工作状态。它是多功能自确认传感器实现状态自确认的关键部分。
(4)生成输出数据单元:根据故障诊断单元的处理结果,生成多功能自确认传感器的输出数据,包括确认的测量值、测量值不确定度、测量值状态、原始数据和故障类型。
当自确认传感器工作正常时,确认的测量值就是敏感单元的输出;当多功能自确认传感器发生故障时,确认的测量值是被测量的最佳估计值,是重构的数据。
测量值的不确定度反映测量的准确度,由统计方法计算得到。
测量值的状态反映当前多功能自确认传感器的状态,参照自确认传感器可以分为:安全状态、清晰状态、模糊状态、迷惑状态和盲状态五个级别;
原始数据是敏感单元测量值经信号调理单元后的输出,具有重要的参考价值。
故障类型在发生故障时给出故障诊断单元的诊断结果,如果无故障,则输出正常模式。
2 多功能自确认传感器的特征
2.1 状态自确认功能
传统的多功能传感器只能简单的给出被测物理量的测量值,而对多功能传感器自身的状态未做任何评价,多功能自确认传感器在监测多个物理量的同时,能够通过对原始信号的进一步处理,给出测量值的状态。通过测量值可以了解多功能自确认传感器的工作状态,进而实现对传感器的健康监控。用户可以根据传感器的自身工作状态及其变化趋势,决定是否更换传感器。一旦发生故障时,可以发出报警信号,并进行数据重构。
2.2 数据恢复功能
系统中的传感器在发生故障时,输出值立刻偏离正常值,错误的测量数据将会影响系统运行,甚至发生重大故障。多功能自确认传感器在发出故障提示信号的同时,利用多个测量参数之间的相关性、冗余性以及历史数据等,进行数据重构,对发生故障的输出部分进行数据恢复,代替故障输出,保证工业现场短时间内的物理量监测要求,同时为更换传感器争得宝贵的时间。数据恢复功能是多功能自确认传感器的一个重要特点。
2.3 能够给出测量值不确定度
传感器在测量过程中会产生各种误差,如敏感元件的非线性误差、噪声干扰误差、信号处理误差等。不确定度是在综合这些误差因素的基础上,对测量准确度的一个表征。多功能自确认传感器能够在生成输出数据单元中通过对测量信号的分析处理,计算出测量值的不确定度。用户可以根据不确定度的大小及其变化趋势,判断传感器的性能变化,及时更换准确度减低的传感器,避免传感器发生故障而影响系统运行。
2.4 充分利用多参数之间相关性
多功能自确认传感器测量的是多个物理量,得到的是不同类型的多个参数,这些输出参数之间通常存在一定的相关性。例如在特定环境中风速与温度、温度与湿度、温度与气体浓度之间具有一定的相关性。多功能传感器可以利用这些不同类型参数之间的相关性来实现状态自确认及数据恢复。
3 多功能自确认传感器的关键技术
多功能自确认传感器是传感技术、信号处理、故障诊断、计量学等理论和技术相融合的产物。下面就其关键技术谈谈笔者的看法。
3.1 多功能自确认传感器的状态自确认及故障诊断算法
随着传感器的应用日益广泛,对传感器的可靠性要求越来越高,传感器故障诊断问题日益受到人们的重视。自确认多功能传感器具有状态自确认及故障诊断功能,将给用户使用带来极大地方便。
故障诊断单元是多功能自确认传感器的关键部分之一。如何采用有效的算法进行故障诊断,是设计和实现多功能自确认传感器的重要问题。
传感器故障诊断的研究学者们提出了很多方法,可以应用在多功能自确认传感器故障中,目前国内外报道的主要算法有以下几种[5-15]:①基于信号处理的方法,主要包括:基于小波变换的故障诊断方法、基于信息融合的故障诊断方法等;②基于解析模型的方法,主要包括:等价空间法、观测器法、参数估计法等;③基于知识的故障诊断方法,主要包括:基于粗糙集知识约简的故障诊断算法等;④基于机器学习的故障诊断方法,主要包括:基于神经网络的故障诊断方法、基于主元分析的故障诊断方法、基于核主元分析的故障诊断方法、基于独立成分分析的故障诊断方法、基于支持向量机的故障诊断方法等。
由于多功能自确认传感器可以同时检测多个物理量,检测的信息中具有一定的相关和冗余关系,这样就可能在故障诊断算法中充分利用这些特性,实现更有效的诊断。这是多功能自确认传感器区别于其它类型传感器的重要特点,也是今后有待深入研究的重要内容。
3.2 多功能自确认传感器数据恢复方法
当多功能自确认传感器发生故障时,可能导致其某一个参数输出异常。这时可以充分利用其多参数之间的相关性,利用其它正常输出的参数数据恢复输出异常参数的数据,在短时间内代替故障输出,作为该参数确认的测量值。目前还没有针对多功能自确认传感器的数据恢复方法,但故障传感器的数据恢复一直以来备受国内外学者的关注,提出了一些数据恢复方法,可供借鉴。现有的传感器数据恢复方法主要有:基于鲁棒自联想神经网络的故障传感器数据恢复方法,基于移动最小二乘的传感器数据重构方法,基于小波包PCA的故障传感器数据重构方法等[16-18]。
3.3 多功能自确认传感器不确定度计算方法
多功能自确认传感器测量值的不确定度既反映传感器测量的准确度,同时又是传感器可靠性的重要指标。正常测量值的不确定度采用统计计算方法。传感器发生故障状态下的测量值的不确定度计算一般采用在传感器正常情况下不确定度的基础上,针对具体的故障模式,根据经验,增加一个加性不确定度来计算。这种计算方法具有很大的人为因素,因此多功能自确认传感器测量值不确定度计算方法有待深入研究。
4 一个多功能自确认传感器实验模型
本文作者在初步研究的基础上,利用甲烷、温度和湿度敏感元件以及基于DSP28335的信号处理系统组成了多功能自确认传感器实验模型,其原理框图如图2所示。
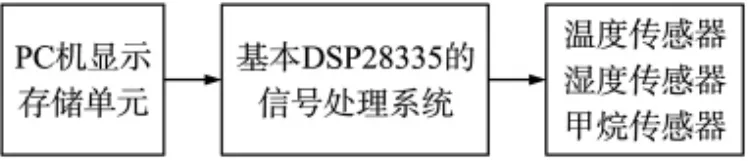
图2 基于DSP28335多功能自确认传感器原理框图
该多功能自确认传感器的敏感单元由温度传感器、湿度传感器和甲烷传感器组成,封装在一个探头内,实验时将该探头置于充满空气和甲烷的密闭容器中。三个敏感元件的分别输出代表温度、湿度和甲烷浓度的电压信号,送入基于DSP28335的信号处理系统中进行滤波、放大、AD转换,然后由DSP处理器进行信号处理和运算。
多功能自确认传感器的故障诊断单元由DSP28335实现,本例中传感器故障诊断算法采用了基于偏最小二乘(PLS)和支持向量机(SVM)算法。故障诊断后如无故障,多参数自确认传感器按照功能模型描述的过程工作,确认测量值,输出温度、湿度和甲烷气体浓度的测量值状态和原始数据。测量值不确定度通过统计算法获得。如果某个测量值出现异常,经诊断后确定是传感器故障之后进行数据重构,并用重构的数据代替异常数据。由于出现故障,测量值的不确定度必然降低,多参数自确认传感器及时报警。本系统中温度和湿度敏感元件稳定性好,不易发生故障;甲烷传感器容易发生故障,且常见是由于气敏元件工作在高温状态,加热丝断裂,引起电路的开路、短路(加热丝脱落在加热电极)。本文以测量甲烷的敏感元件发生开路或短路故障、其他敏感元件正常为例,研究多参数自确认传感器故障诊断和数据重构的过程。如果信号经由故障诊断单元故障诊断后有故障,则首先采用基于偏最小二乘法的回归分析进行数据恢复,代替故障输出,然后再进入生成输出数据单元执行相关操作,输出各种确认数据。由于篇幅所限,关于详细的实验结果另文介绍。
5 多功能自确认传感器的发展方向
目前笔者尚未查到关于多功能自确认传感器的文献报道。这种传感器具有广泛的应用前景,它的发展与传感技术、信号处理技术、MEMS等技术密切相关,现代科技的发展将为多功能自确认传感器提供强有力的支持。但现阶段处于理论方法研究和实验室试验阶段。近期据需解决的问题有:
(1)多功能自确认传感器的算法研究
针对多功能自确认传感器的特点,研究故障诊断算法、数据恢复方法以及不确定度计算方法,要充分利用其多个参数之间的相关性。研究适用于不同多功能自确认传感器的信号处理方法以及更有效的通用的算法。与传统的多功能传感器和普通自确认传感器相比,多功能自确认传感器的输出信息更加丰富,这些信息的获得都是建立在大量的信号分析与计算的基础之上的,所以多功能自确认传感器必须具有运算能力更加强大的信号分析处理单元以及相应的分析算法。
(2)关于传感器故障诊断的研究
传感器故障诊断不同于系统故障诊断。当传感器输出数据异常时,必须分清这是被测对象的实际输出还是传感器故障产生的错误数据。有些场合很难区分。多参数之间的相关性可作为诊断的依据,但如何准确地诊断传感器故障,还有待深入研究。
(3)多功能自确认传感器需要集成化。
为适应各种工业场合的应用,多功能自确认传感器需要减小体积,向集成化方向发展。传感技术的发展,使多个敏感元件集成在一个微小芯片上成为可能,例如文[19]研制了一种集成式多功能硅微传感器。进一步将信号调理电路和信号处理电路集成在一个芯片上。随着芯片设计技术与加工技术的进步,将来一定能将敏感元件、信号处理单元集成在一起制成集成化的多功能自确认传感器。
6 结论
本文提出的多功能自确认传感器的研究刚刚开始。自确认的功能可认为是一种智能行为,主要靠算法和软件实现。但目前研究的智能传感器尚未具有自确认传感器给的全部功能。虽然现阶段种种问题尚未解决,相信随着研究的深入和技术的进步,这种新型传感器——多功能自确认传感器一定会迅速发展并得到广泛应用。
[1]Torsi,Dodabalapur.Multi-Parameter Gas Sensors Based on Organic Thin-Film-Transistors[J].Sensors and Actuators,2000,1(4):312-316.
[2]M P Henry,D W Clark.The Self Validating Sensor:Rationale,Definitions and Examples[J].Control Engineering Practice,1993,1(4):585-610.
[3]Liu R P,Fuent M J,Henry M P,duta M D.A Neural Network to Correct Mass Flow Errors Caused by Two-Phase Flow in a Digital Coriolis Mass Flowmeter[J].Flow Measurement and Instrumentation.2001,12:53 -63.
[4]冯志刚,王祁,信太克规.自确认压力传感器结构设计.传感技术学报.2006,19(3):662 -666.
[5]Barberree D.Dynamically Self-Validating Contact Temperature Sensors[C]//AIP Conference.Proceedings no.684,2003 pt.2:1097-1102.
[6]吕伯权,李天铎.一种基于小波网络的故障检测方法[J].电工技术学报.1997,12(4):34 -36.
[7]石志勇,李国章,付建平,黄允华.基于平均空间的故障检测与诊断[J].信息与控制.1999,28(6):459 -465.
[8]Philippe kerliizin,Philippe Refregier.Theoretical Investigation of the Robustness of Multiplayer Perceptrons:Analysis of the Linear Case and Extension to Nonlinear Networks[J].IEEE Trans.On neural networks.1995,6(3):560 -571.
[9]A.Bernieri,Giovanni Betaa,Consolatina Iaguori.On-Line Fault Detection and Diagnosis Obtained by Implementing Neural Algorithms on a Digital Signal Processor[J].IEEE Trans.Instrum.Meas.1996,45(5):894 -899.
[10]A.L.Dexter.Fuzzy Model Based Fault Diagnosis[J].IEEE Proc.Control Theory Application.1995.142(6):20 -49.
[11]张昱君,刘爱伦.基于改进主元分析方法的化工生产过程的故障检测.工业控制计算机.2006,19(1):2 -5.
[12]Sheng-Fa Yuan,Fu-Lei Chu.Support Vector Machines-Based Fault Diagnosis for Turbo-Pump Rotor[J].Mechanical Systems and Signal Processing,2006,20:939 -952.
[13]Yong Chang,Yihuai Hu.Fault Diagnosis of Marine Diesel Engine Based on Blind Source Separation[C].The 2nd International Conference on Computer and Automation Engineering(ICCAE 2010),Singapore,February 26 -28,2010.
[14]Yang S J,Stotz A.High Level Information Fusion for Tracking and Projection of Multistage Cyber Attacks[J].In Formation Fusion,2009,10(1):107 -121.
[15]Aran O,Burger T,Caplier A.A Belief-Based Sequential Fusion Approach for Fusing Manual Signals and Non-Manual Signals[J].PatternRecognition,2009,42(5):812 -822.
[16]钮永胜,赵新民.采用鲁棒自联想神经网络高质量地恢复故障传感器信号方法研究.传感技术学报.1997,2:(1-5).
[17]刘丹,孙金玮.移动最小二乘法在多功能传感器数据重构中的应用.自动化学报.2007,33(8):824 -828.
[18]徐涛,王祁.基于MSPCA的传感器故障诊断与数据重构.计算机工程与应用.2008,44(11):168 -169.
[19]周建发,赵玉龙等.一种集成式多参数硅微传感器.传感技术学报,2006,19(2):273 -276.
