一种新型车载自动过分相系统的改进设计*
2011-05-04刘建秀谷明辉
刘建秀,谷明辉
(郑州轻工业学院 机电工程学院,河南郑州450002)
自动过分相的关键技术是定位,定位准确是系统可靠性的关键,也是机车运行中安全的关键。GFX-3型自动过分相系统的定位主要是靠车载感应器在机车运行中接收地面定位器信号来确定机车位置的。地面定位器和车载感应器分别采用斜对称埋设和备份安装(分相区前后分别埋有两个地面定位器),以保证自动过分相的安全和可靠。此型号自动过分相系统不可避免地存在一些不足。通过对郑州机务段GFX-3型自动过分相装置使用情况的调查,发现一些隐患。
(1)地面定位器可能损坏或者反应不灵敏。导致机车感应器无法正常接收信号,从而机车不能进行自动过分相操作。(2)车载感应器可能损坏甚至丢失。列车在行驶或连挂或制动停车时,车辆之间会有冲击振动,由此引起车载感应器安装支架松动,因碰撞而损坏甚至丢失。(3)过分相信号单一,没用冗余。在铺轨过程中,如果人为失误造成地面定位器错位,将使机车接收过分相信号不准,造成分相区提前或者滞后的假象;机车行驶中路面上有磁性物体或许能造成假的过分相信号,使机车误进行自动过分相操作。为解除这些隐患,有针对性的设计了一种新型自动过分相系统。
1 新系统简介
新型的自动过分相系统是在GFX-3型系统的基础上,增加新的过分相信号发生模块,从而实现过分相信号的冗余,保证了机车运行安全。
新增加的过分相信号发生模块有两个,分别是时间模块和车载GPS定位模块。机车行驶时,车载GPS定位模块在能和卫星系统正常通信的情况下,时刻监测机车当前地理坐标,并把当前地理坐标与预输入的各点地理坐标进行比较,以确定机车是否接近进入分相区、处在分相区或驶出分相区;时间模块则根据监测的机车当前行进速率和地理坐标,当机车行进在接近分相区时,计算出机车到达分相点的剩余时间(即以倒计时的形式显示),以提示司机距离过分相动作剩余的时间,当机车行进在分相区时,会计算出机车已进入分相区的时间;当机车在接近分相区行驶时,司机操作台指示灯会有预警信号,为“黄色”;当机车到达过分相点时,指示灯显示为“红色”,同时蜂鸣器响起,提示司机自动过分相开始。因此机车的过分相信号发生源有3种,分别是GPS定位模块、时间模块、地面定位器,3种冗余信号源中如果有一种出现故障,系统会及时作出提示以引起司机注意,司机可观察自动过分相系统的运行情况作相应处理,必要时可作手动过分相,以避免发生行车事故。
新系统采用VB 6.0软件创建人机交互界面,便于操作。
1.1 时间模块
利用监测到的机车运行速度和机车当前地理坐标,计算出机车到达分相点的剩余时间或机车已进入分相区的时间。当机车在驶入接近分相区那一刻时,时间模块从GPS定位模块中取得机车当前地理坐标,然后和预输入分相点地理坐标比较,确定机车与分相点的距离S。同时时间模块又根据监测到的机车当前行驶速率v,可计算获得机车到达分相区所需时间t=S/v。当机车在驶入分相区的那一刻时,以同样的方法获得机车在分相区中行驶的时间t′。各个分相区的这两个时间值都要预输入时间模块,并在每次机车运行前要对这些预输入时间值在人机交互界面上进行确认。如图1所示。
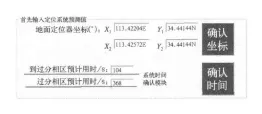
图1 定位预输入部分界面
当机车经过过分相倒计时点后,即在接近分相区行驶时,人机交互界面定位系统部分会同步显示机车到达分相点的剩余时间,如图2所示。

图2 机车在接近分相区行驶时的定位系统显示信息
当“微机计算到达剩余时间”(倒计时)为0时,机车将进行断主断等过分相操作。机车并于此刻进入分相区,此时人机交互界面定位系统部分将同步显示机车在分相区中行驶的时间,如图3所示。
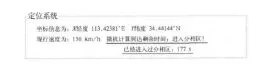
图3 机车在分相区中行驶时定位系统显示信息
当机车驶出分相区后,时间模块会根据当前地理坐标,判断机车是否在过分相倒计时区域(即是否在接近分相区),不在则定义为机车在自由区行驶,此时人机交互界面定位系统部分将同步显示“准备下次倒计时!”,直到机车再次进入接近分相区,如图4所示。
机车行驶的路况是复杂的,存在隧道等影响GPS定位模块与卫星通信的路段。即当机车驶入隧道时,车载GPS定位模块会和卫星失去通信联系。在这种情况下,时间模块是将GPS定位模块起作用的最后一刻记为机车于此刻进入接近分相区,这样就可按正常程序计算出机车到达分相点的所需时间t=S/v,以后的倒计时及过分相操作如常。
自动过分相系统启用前,需要对路况信息进行统计,其中包括地面定位器的地理坐标和不能GPS通信的隧道等路段的地理坐标等。然后根据统计的路况信息,确定自动过分相系统时间模块的过分相倒计时点,对于GPS定位系统无法工作的区域,要把倒计时点提前或滞后。确定的倒计时点时两个地理坐标的比较有一个误差范围,此误差范围是根据机车运行速率状况统计计算出的。最后把统计好的各种数据输入时间模块。
1.2 GPS定位模块
自动过分相系统GPS定位模块的作用是动态监测机车在运行中的地理坐标,以确定机车在轨道中的位置,并将地理坐标动态地显示在人机交互界面上,如图1~图4所示。机车运行中,GPS定位模块会把监测到的当前地理坐标实时与预输入的接近分相点地理坐标和地面定位器地理坐标进行比较,以确定是否到达接近分相区、处在分相区。当监测到的坐标值在指定范围内时,机车会进行相应的时间模块的倒计时操作或系统的自动过分相操作;不在指定范围时,GPS定位模块正常监测,机车正常行驶。
自动过分相系统启用前,同样需要统计地面定位器的地理坐标并预输入GPS定位模块,预输入值要保证准确性。这里预输入的地面定位器的地理位置坐标,不是所有地面定位器的地理位置坐标,只是预断点地面定位器的地理坐标和强合点的地理坐标。GPS定位模块中地面定位器地理坐标的预输入是一次性的,如果以后铁道线路有所改动,只需预输入地理坐标进行更改即可。机车运行前需要对这些预输入的地理坐标进行确认。人机交互界面的相应部分如图5。
当机车进入隧道时,GPS定位模块会无法工作。而统计的路况信息中有隧道前一段某一点的地理坐标,当机车到达该点时,过分相信号的控制权将移交给时间模块,由时间模块监测机车的过分相状态,保证机车的运行安全。
2 新型自动过分相系统运行机制
新型自动过分相系统不只依赖地面定位器对机车进行定位,它还有另外两种定位信号源选择,即GPS定位模块和时间模块。这两种模块的定位方法跟地面定位器的定位方法不同,它们有各自的特点。
GPS定位模块实时监测机车的当前地理坐标,并把它输入到时间模块。GPS定位模块实时把机车当前地理坐标与预输入的过分相倒计时点的地理坐标或地面定位器预断点地理坐标或地面定位器强合点地理坐标进行比较,确定机车相对于分相区的位置。当机车当前地理坐标与相应的过分相倒计时点的地理坐标在比较误差范围内时,时间模块根据采集的地理坐标数据计算出距离S,又利用采集的速度v,计算出倒计时间t=S/v,并依此开始倒计时,倒计时状态同步在人机交互界面上显示。当倒计时为0时,机车即开始执行自动过分相的断主断等操作。当机车当前地理坐标与相应的地面定位器预断点地理坐标在比较误差范围内时,机车同样即开始执行自动过分相的断主断等操作。而当机车经过地面定位器预断点时,机车依然会执行自动过分相的断主断等操作。这3种分相区前的过分相信号为逻辑或关系,即若有一种信号先起作用,则其余后来的两种信号就失去作用,机车以此先到来的信号为触发条件进行相应的自动过分相操作。
当机车在分相区行驶时,时间模块对机车在分相区中的行驶时间进行计时,当计时达到预输入的此分相区机车过分相统计时间时,机车开始执行自动过分相的合主断等操作。当机车的当前地理坐标与相应的地面定位器强合点地理坐标在比较误差范围内时,机车亦开始执行自动过分相的合主断等操作。而当机车经过地面定位器强合点时,机车依然会执行自动过分相的合主断等操作。这3种分相区后的过分相信号任意两种先来的过分相信号被接收确认后,第3种后来的信号将不起作用时,机车才会被触发进行自动过分相的合主断等操作。
3种过分相信号之间的逻辑关系,很好地实现定位信号的冗余,保证了在某一种定位信号失效的情况下机车仍能正常地进行自动过分相,进一步保障了机车在行进中过分相时的安全。
3 搭建设备时的疑难及其解决策略
搭建设备时,要实现新增加自动过分相定位模块的功能,会遇到的问题有:(1)GPS定位模块如何嵌入自动过分相系统,并与系统实现通信;(2)时间模块和GPS定位模块如何实现数据的预存和处理。
针对这两个问题的解决策略是:(1)GPS定位模块可使用GPS信号接收机,它能够对GPS卫星信号进行搜索、捕捉,并因有通信接口,很容易实现与自动过分相系统通信。(2)数据预存和处理可通过单片机实现;数据处理较复杂,可用64位单片机;数据处理程序写入ROM(只读存储器),预存数据写入 RAM(随机存储器);为了保证数据预存与处理的正确性与安全性,可将写好程序的单片机统一化,作为自动过分相系统的专用设备。
4 结束语
在进行新型自动过分相系统的设备搭建时,仅需要在GFX-3型自动过分相系统基础上新嵌入两个定位模块,GFX-3型系统的原有部分改动很少,因而节约了研究成本。与GFX-3型系统相比较,在性能上,新型自动过分相装置更优越,它能更有效避免机车运行时发生意外,进一步地保证机车通过分相区时安全,从而使机车的运行更具可控性。系统在一定程度上是具有试用推广价值。
[1] 谢兴中.电力机车过分相问题的探讨[J].机车电传动,2008,(3):64-66.
[2] 曾晓安,李 明.大秦线车载自动过分相系统的研制与应用[J].机车电传动,2007,(4):11-14.
[3] 宁 涛,李 明.电力机车自动过分相系统专用检测台的设计[J].机车电传动,2007,(3):65-73.
[4] 姚孝刚,陈 娟.电力机车自动过分相功能检测系统研制[J].铁道机车车辆,2006,(5):67-68.
[5] 姚孝刚.大秦线自动过分相装置误动的处理[J].机车电传动,2006,(4):70-71.
[6] 李官军,冯晓云.高速动车组自动过分相控制策略研究与仿真[J].电工技术学报,2007,(7):181-185.
[7] 姚孝刚.自动过分相系统设计与改进[J].机车电传动,2009,(4):41-43.
