间接矩阵变换器供电电励磁同步电动机DTC
2011-04-27周扬忠周建红
周扬忠,周建红
(福州大学 电气工程与自动化学院,福建 福州 350108)
间接矩阵变换器供电电励磁同步电动机DTC
周扬忠,周建红
(福州大学 电气工程与自动化学院,福建 福州 350108)
直接型矩阵变换器具有无直流储能环节、输入与输出电流波形均为正弦波、能量双向流通、网侧功率因数可控等优点,但换流复杂。研究了一种间接矩阵变换器(IMC)供电电励磁同步电动机(ESM)直接转矩控制(DTC)系统,其整流级实现电网侧单位功率因数控制,逆变级实现转矩和磁链控制,采用逆变级插入零矢量方式实现前端整流级双向开关的换流。实验结果证明了这一控制策略的可行性。
电励磁同步电动机;间接矩阵变换器;直接转矩控制
1 引言
电励磁同步电动机具有功率因数可调、效率高等突出优点,在发电和电机传动两方面均有广泛应用。电励磁同步电动机(ESM)直接转矩控制(DTC)理论于1998年前后被提出[1-3],但这些文献中均采用了基于二极管整流型交-直-交(VSI)功率主电路。该电路突出不足之处有:1)直流母线上采用了大容量的电解电容滤波,缩短了变换器工作寿命;2)网侧输入电流非正弦,输入功率因数较低;3)能量不能双向流动。为了克服VSI方案的不足,文献[4]将直接型矩阵变换器引入到电励磁同步电动机直接转矩控制中,分析研究了该系统中磁链、转矩及网侧功率因数控制策略,仿真表明系统具有无直流环节,能量可以双向流动,网侧输入电流正弦等优点,但实际存在功率管换流复杂缺点。而文献[5-7]对间接矩阵变换器PWM控制策略进行了详细研究,且进行了实验论证,但所带负载均非电机。为了进一步改善矩阵变换器中功率管换流,本文将间接矩阵变换器(IMC)、DTC和ESM的优点结合起来,提出了一种基于IMC供电ESM DTC控制策略,并进行实验证明此控制策略的可行性。
2 基于间接矩阵变换器供电直接转矩控制原理
2.1 间接矩阵变换器输入输出关系
间接矩阵变换器由整流级电路和逆变级电路两部分组成,它采用了交-直-交型的双级变换结构,整流级电路由6个双向开关组成,而逆变电路与传统的两电平逆变器结构相同,电路拓扑如图1所示。定义整流级双向开关变量分别为Sap~Scn,逆变级开关变量分别为SAp~SCn。开关管导通时,对应开关变量取值为1;反之,开关管关断时取值为0。
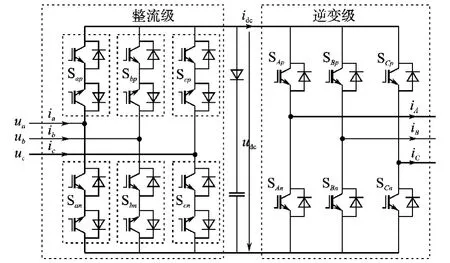
图1 间接矩阵变换器电路拓扑Fig.1 IMC circuit topology
2.1.1 整流级
在已知直流母线电流idc情况下,可以推导出网侧输入电流矢量ip结果如下:
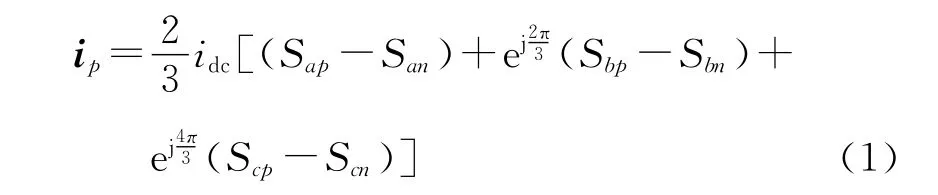
可见ip幅值受控于直流母线电流idc,但其辐角受控于整流级开关状态。在逆变级一定的开关组合情况下,直流母线电流idc取决于负载电流,具体关系如下:

根据式(2)可以推导出在逆变级不同的输出电压矢量情况下,直流母线电流idc与负载电流关系如表1所示,其中矢量括号内的3位数从左到右依次代表SApSBpSCp的取值。
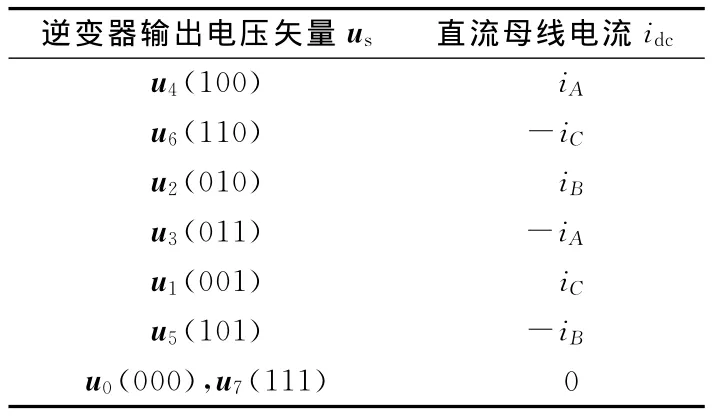
表1 直流母线电流idc Tab.1 DC link current idc
根据式(1)可以绘出网侧输入电流矢量在空间上的分布,如图2所示。图2中×表示对应桥臂开关管都不导通,0表示对应的下桥臂开关管导通,1表示对应上桥臂开关管导通。应该指出的是,图2中矢量方向是以直流母线电流为正极性时画出的,如果直流母线电流为负极性,则对应矢量方向与图2中相反。矢量括号内的3位数从左到右依次代表SapSbpScp的取值。
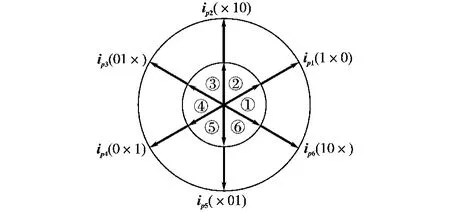
图2 网侧输入电流矢量Fig.2 Input current vector in line side
整流级不同的开关组合时网侧电流矢量及直流母线电压udc进一步总结如表2所示。
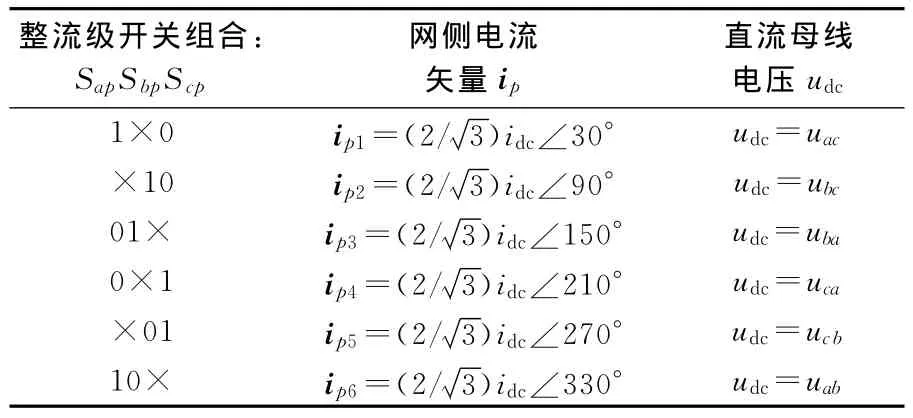
表2 网侧电流矢量及直流母线电压Tab.2 Current vector in line side and DC link voltage
2.1.2 逆变级
后级逆变器与传统的两电平逆变器一样,在已知直流母线电压udc情况下,后级逆变器输出电压矢量为

但直流母线电压udc取决于前端整流级的开关状态,不恒定,具体形式如下:

所以,从式(4)和图1整流级拓扑结构可见,实际出现在直流母线上的电压是网侧的线电压,是一脉动的直流量。这样逆变器输出的电压矢量us幅值是变化的。输出电压矢量如图3所示。
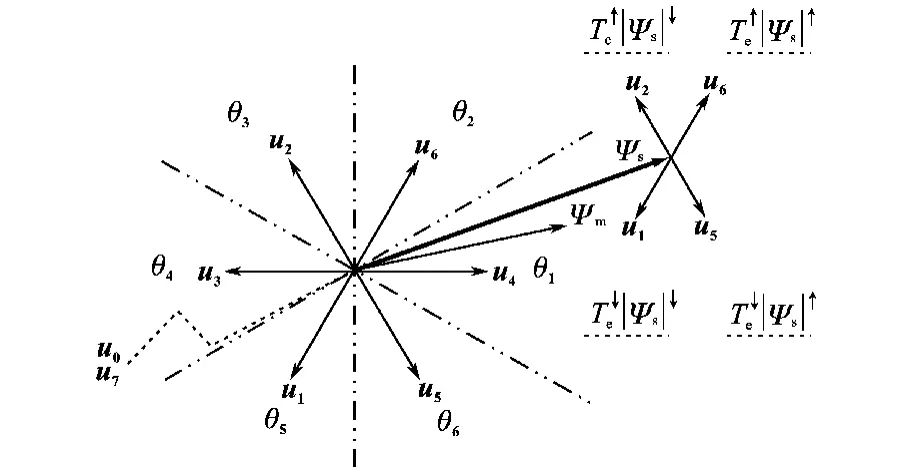
图3 输出电压矢量Fig.3 Output voltage vector
2.2 转矩及磁链的控制原理
电励磁同步电动机中电磁转矩可以表示成如下表达式:
式中:Ψm,Ψs分别为气隙磁链和定子磁链矢量;δsm为定子磁链矢量与气隙磁链矢量夹角。
将δsm定义为直接转矩控制有阻尼绕组电励磁同步电机的转矩角。从式(5)可见,有阻尼绕组电励磁同步电动机中电磁转矩在受到转矩角控制的同时,还会受到气隙磁链幅值的变化影响,但由于阻尼绕组的阻尼作用,能使由定子电流、转子励磁电流引起气隙磁链幅值和辐角的变化变得缓慢,在几个控制周期内,气隙磁链矢量相对于转子dq旋转坐标系而言空间位置基本不动,而在直接转矩控制中将定子磁链的幅值在恒转矩区控制成额定值,这样就可利用快速控制转矩角δsm来迅速控制电磁转矩。转矩角的变化量Δδsm与电压矢量的关系为因此,可以通过选择电压矢量来控制电磁转矩。

间接矩阵变换器的转矩及磁链控制与传统两电平逆变器基本DTC原理相似。利用磁链滞环比较器、转矩滞环比较器及定子磁链所处的位置选择出一个最佳电压矢量作用于电动机实现转矩和定子磁链的双闭环控制。
定子磁链和转矩滞环比较器输出量φ,τ函数如下:
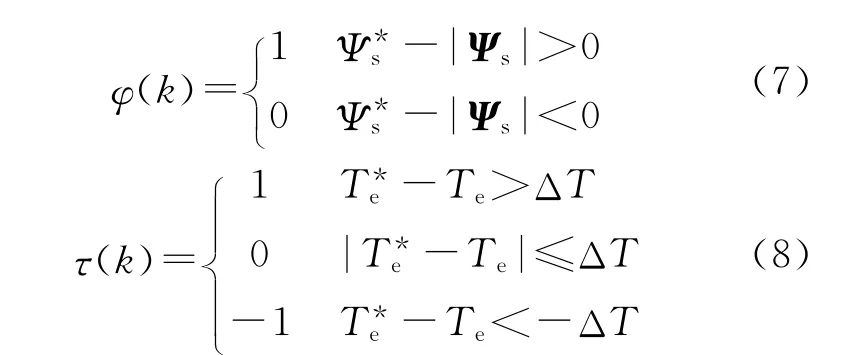
图3中给出了θ1扇区中电压矢量u1,u2,u5,u6对定子磁链矢量及电磁转矩控制效果,用符号“↑”表示增大,“↓”表示减小。假设电机转子逆时针旋转,则电压矢量u1,u2使定子磁链矢量模减小,而u5,u6使定子磁链矢量模增大;u2,u6使电磁转矩增大,而u1,u5使电磁转矩减小。
根据上述原理可确定出同时控制磁链和转矩的最优开关矢量表如表3。
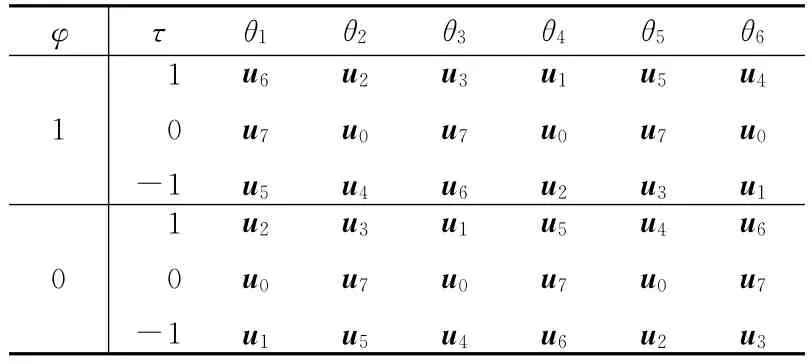
表3 逆变级最优开关矢量表Tab.3 Optimal switch vector table of inverter
2.3 电网侧功率因数控制
由于间接矩阵变换器要保证中间母线电压udc≥0,所以电网输入侧功率因数角可控制范围为-30°~+30°,下面以单位功率因数控制为例。文中所提出的间接矩阵变换器输入电流矢量和输出电压矢量的选择方法可实现一定网侧功率因数控制下快速补偿磁链及转矩的误差。这种网侧功率因数控制只需使得sinφis的平均值逼近给定值即可,仍然采用滞环控制器实现,如图4所示。对sinφis瞬时值进行低通滤波即可获得平均值。
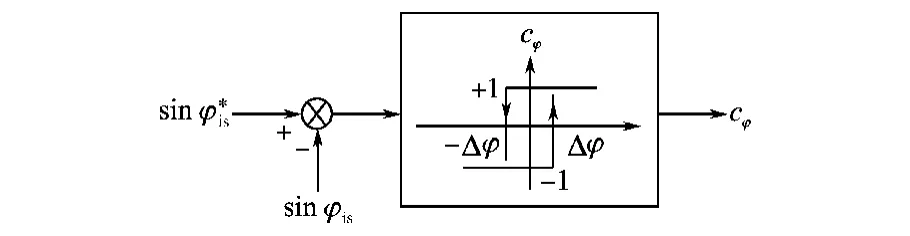
图4 功率因数控制滞环比较器Fig.4 Power factor control hysteresis comparator
为了实现电动机转矩和磁链的控制能力最强,要求前端整流级开关组合应满足直流母线电压为最大正值。假设某个控制周期内,根据DTC算法,逆变级输出u4电压矢量,如图3中所示。将输入电压分成6个扇区,如图5所示。
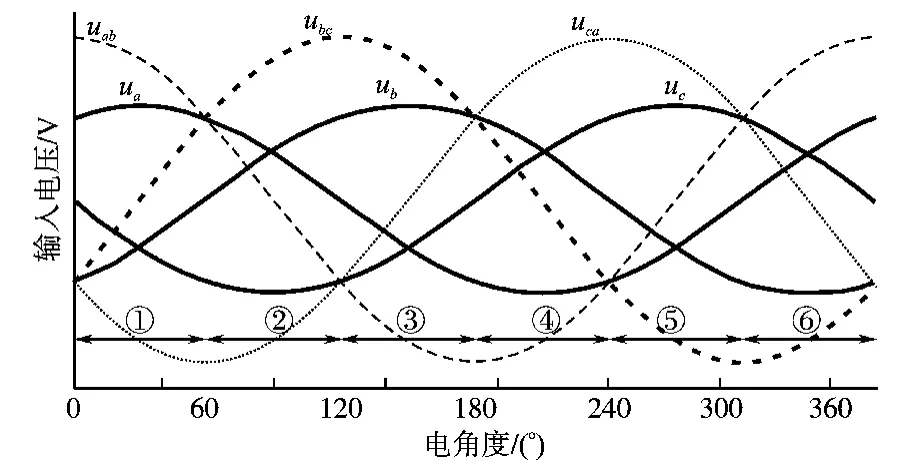
图5 输入电压扇区划分Fig.5 Input voltage sector division
如果网侧输入电压矢量位于第1扇区,则该扇区中uab和uca的绝对值均大于ubc。根据直流母线电压为最大正值的要求,根据表2可确定前端整流级应选择的最佳输入电流矢量为ip1(1×0)或ip6(10×)。这2个电流矢量均能满足磁链和转矩的控制要求。具体选哪一个要视功率因数决定,由于电网输入的电压矢量按照固定电网电角速度旋转,它是不可控制的,假设其旋转方向为逆时针,并假设电流矢量滞后电压矢量φis,如图6所示。
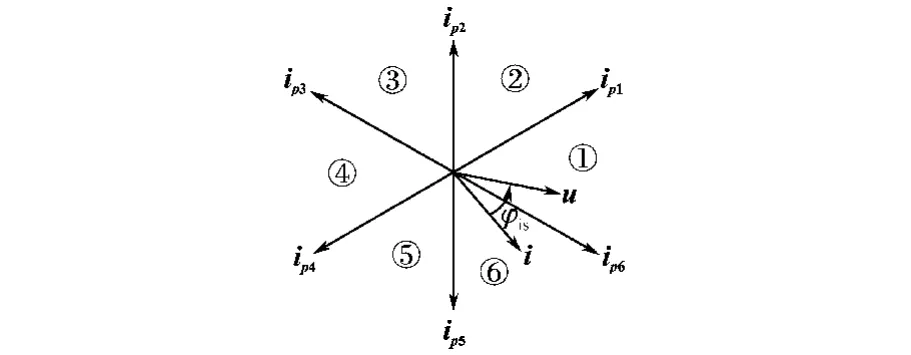
图6 网侧电流矢量与电压矢量Fig.6 Line current vector and voltage vector
若要减小sinφis,则需施加ip1电流矢量,这样输入电流矢量逆时针旋转;反之,若要增加sinφis,则需施加ip6电流矢量,这样输入电流矢量顺时针旋转。同理可得电流矢量超前电压矢量φis的情况。这样根据逆变级输出电压矢量及网侧输入电压矢量所处扇区,实现网侧单位功率因数控制时整流级开关矢量选择如表4所示。表4中第1列为保持定子磁链与转矩在滞环带宽之内时所选择的逆变级输出电压矢量,第1行为电网侧输入电压矢量所处的扇区号。根据所选的输出电压矢量、输入电压矢量所处的扇区及功率因数控制滞环比较器输出值cφ即可选择出满足功率因数控制的一个最优输入电流矢量。
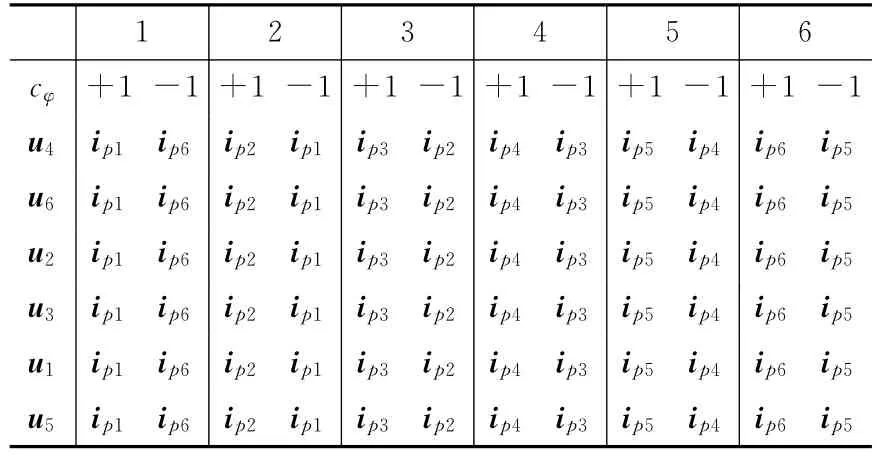
表4 整流级开关矢量表Tab.4 Switch vector table of rectifier
2.4 系统构成
在已知转矩和磁链滞环比较器输出及定子磁链所处扇区在表3中查找到逆变级输出电压矢量,再根据逆变级输出电压矢量、网侧电压所处扇区及网侧功率因数滞环比较器输出值在表4中获得整流级双向开关状态。根据前面磁链、转矩及功率因数控制原理,文中所研究基于间接矩阵变换器的ESM DTC系统如图7所示。图7中关于转子电流的控制策略见文献[8]。其中Nv为网侧输入电压扇区,NΨ为定子磁链所处扇区。
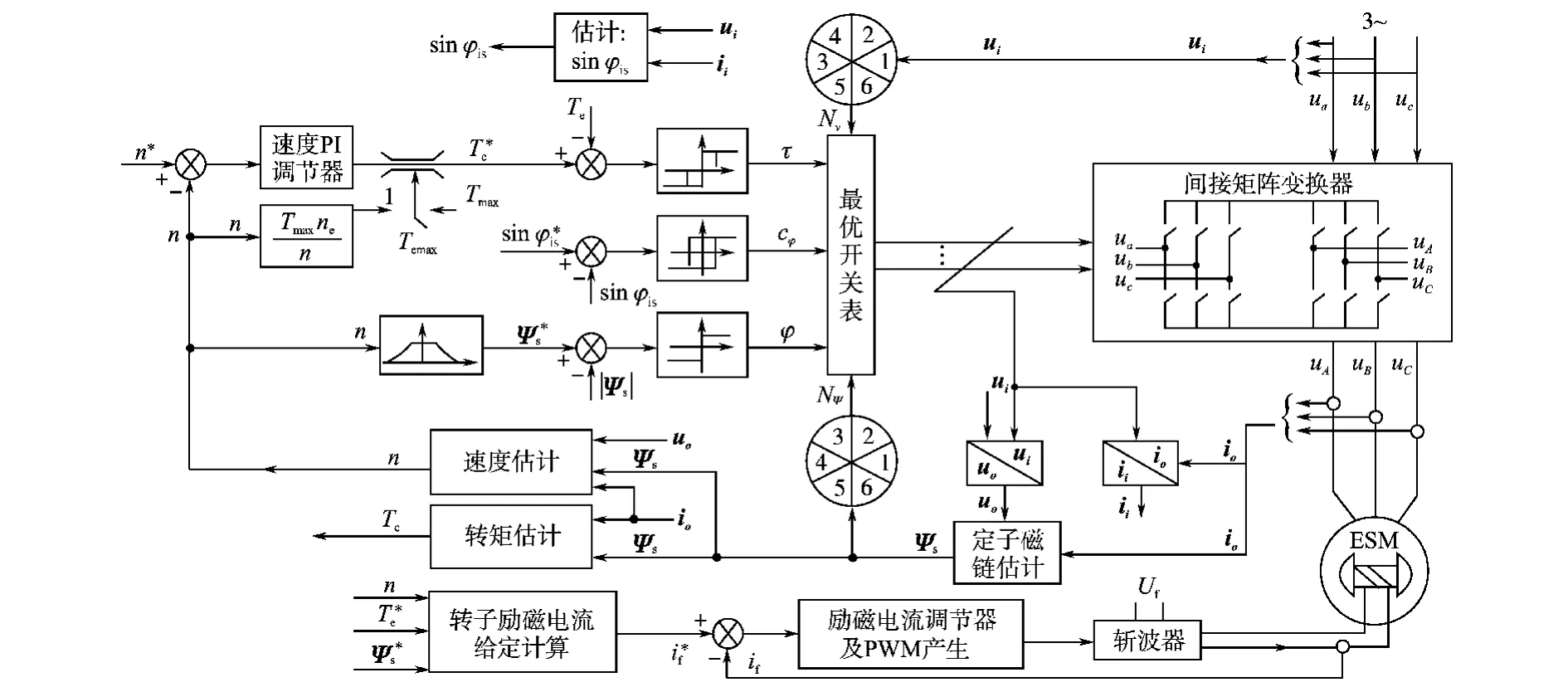
图7 基于间接矩阵变换器ESM DTC系统框图Fig.7 System diagram based on IMC ESM DTC
3 实验研究
实验采用的电机参数为:额定电流5.4A,额定转速1 500r/min,额定功率1.5kW,额定频率50Hz,极对数2,直轴电感221mH,交轴电感161 mH,定子电阻4Ω。为验证上述控制策略的可行性,在以TMS320F2812型DSP为核心的IMC供电ESM DTC全数字控制硬件平台上进行了实验研究。
3.1 双向开关管换流
间接矩阵变换器采用母线零电流换流策略,如图8所示。以a相上桥臂换流到b相下桥臂为例说明:在0时刻,先使逆变级工作在零矢量u0或u7状态后,在t1时刻,关断Sap信号,使a相上桥臂双向开关关断;为了避免a,b两相电源短路,必须插入一个死区时间,在t2时刻,开通Sbn信号,使b相下桥臂双向开关管导通;在确保b相下桥臂完全导通后,在t3时刻逆变级零矢量结束,换流过程结束。
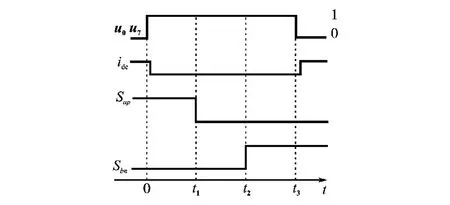
图8 母线零电流换流Fig.8 Zero DC link current commutation
3.2 稳态性能研究
转子电流为1.3A,定子磁链给定0.5Wb,负载+4.5N·m,750r/min转速,网侧单位功率因数控制时稳态实验波形如图9所示。
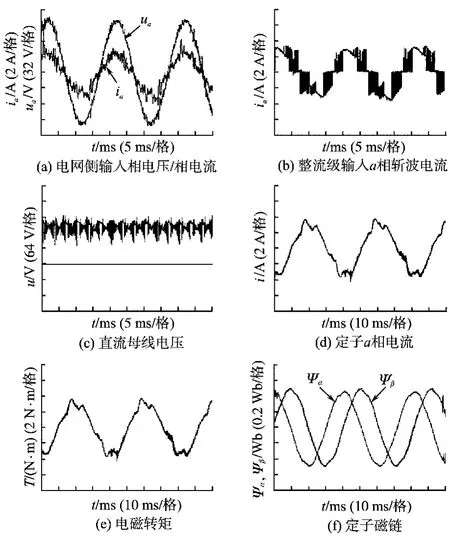
图9 750r/min转速稳态实验波形Fig.9 Steady state experimental waveforms with 750r/min
图10为350r/min转速稳态实验波形。
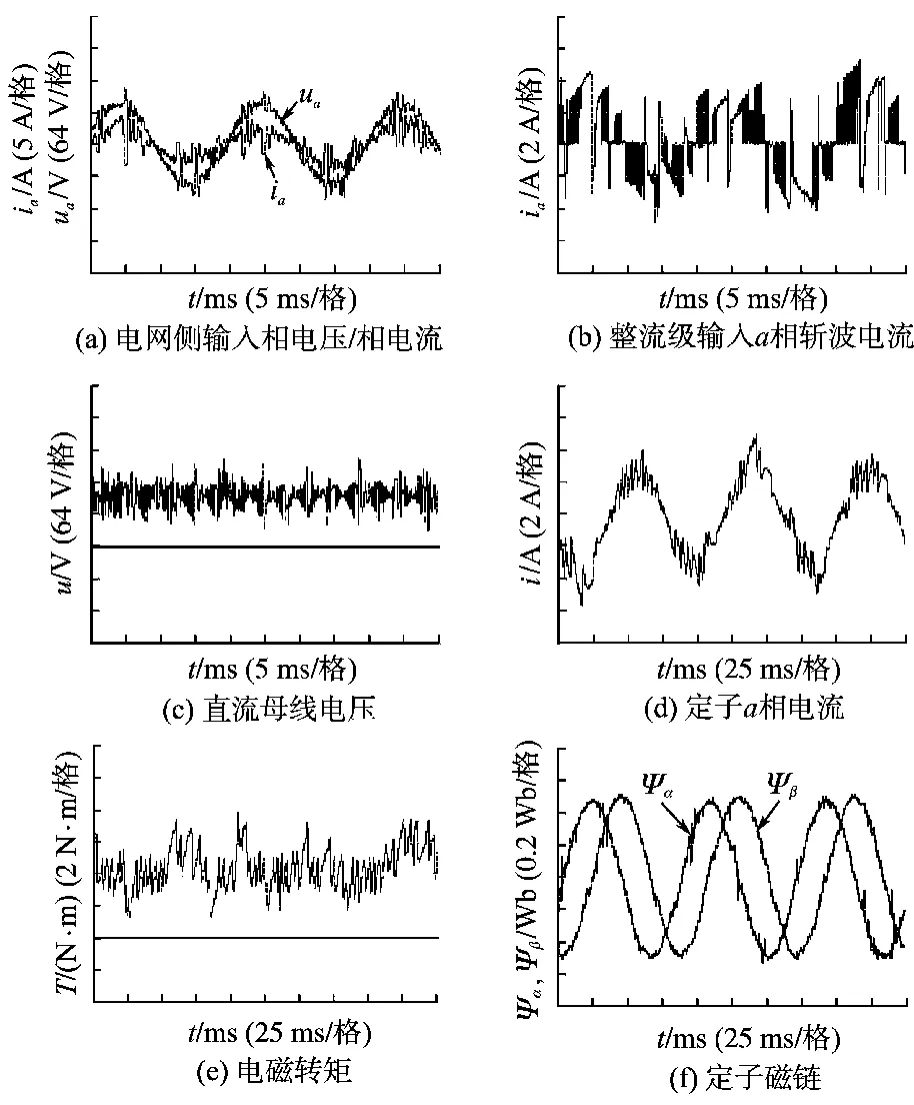
图10 350r/min转速稳态实验波形Fig.10 Steady state experimental waveforms with 350r/min
实验结果表明:1)从图9a、图10a可见网侧输入电流基本上为正弦曲线,网侧电压与电流同相,输入功率因数为 1;2)从图9b、图10b可以看出整流级输入电流为斩波;3)从图9c、图10c可见为了实现网侧功率因数为1,直流母线电压为线电压的脉宽调制波;4)从图9e、图9f、图10e、图10f可见磁链和转矩分别稳定在0.5Wb,4.5 N·m。
3.3 动态性能研究
图11显示转矩给定为±5N·m情况下的转矩阶跃响应波形。转矩在±5N·m之间阶跃响应时间最大为6ms左右。
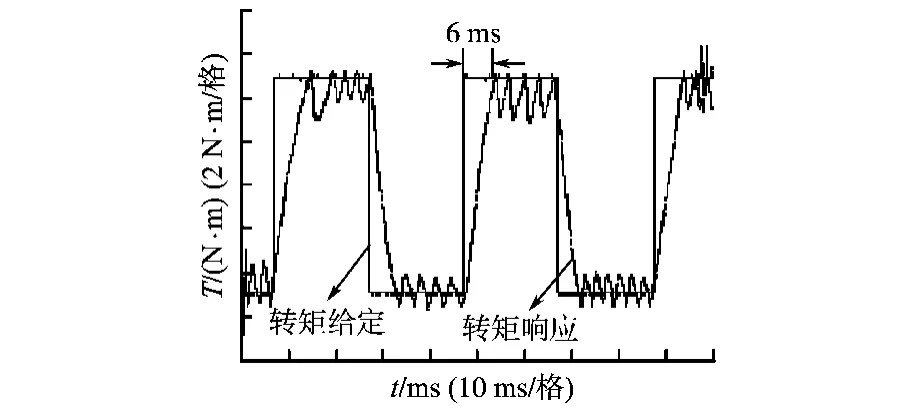
图11 转矩阶跃响应Fig.11 Torque step response
4 结论
将间接矩阵变换器的优点与ESM DTC技术结合在一起,提出了一种基于间接矩阵变换器电励磁同步电动机直接转矩控制策略,推导出了该系统最优开关矢量表,实验论证了此控制策略的可行性。实验结果表明系统具有良好的稳态性能和动态性能。IMC供电ESM DTC控制策略能快速控制网侧功率因数、电磁转矩及定子磁链,系统输入输出电流基本为正弦波,网侧为单位功率因数控制。
[1] Pyrhonen O.Analysis and Control of Excitation,Field Weakening and Stability in Direct Torque Controlled Electrically Excited Synchronous Motor Drives[D].Switzerland,Lappeenranta University of Technology,1998.
[2] 田淳,胡育文.一种新颖的电励磁同步电动机直接力矩控制方案[J].南京航空航天大学学报,2001,33(2):108-112.
[3] 周扬忠,胡育文,黄文新.低转矩磁链脉动型电励磁同步电机直接转矩驱动系统的研究[J].中国电机工程学报,2006,26(7):152-157.
[4] 周扬忠,钟天云.矩阵变换器供电同步电动机直接转矩控制研究[J].电气传动,2008,38(10):3-8.
[5] Johann W Kolar,Frank Schfmeister,Simon D Round,etal.Novel Three-phase AC-AC Sparse Matrix Coonverters[J].IEEE Transactions on Power Electronics,2007,22(5):1649-1661.
[6] Christian Klumpner,Peter Nielsen,Ion Boldea,etal.A New Matrix Converter Motor(MCM)for Industry Applications[J].IEEE Transactions on Industrial Electronics,2002,49(2):325-335.
[7] Wei Lixiang,Lipo T A,Chan Ho.Matrix Converter Topologies with Reduced Number of Switches[C]∥Power Electronics Specialists Conference,2002,IEEE 33rd Annual,2002,1:57-63.
[8] 周扬忠.电励磁同步电动机直接转矩控制理论研究与实践[D].南京:南京航空航天大学,2006.
修改稿日期:2010-11-30
Electrically Excited Synchronous Motor DTC Supplied by Indirect Matrix Converter
ZHOU Yang-zhong,ZHOU Jian-hong
(CollegeofElectricalEngineering,FuzhouUniversity,Fuzhou350108,Fujian,China)
Conventional matrix converter has the advantages of no DC capacity,bidirectional power flowing,adjustable input power factor and pure sine waveforms at line and load sides.However,commutation problem is complicated.A new direct torque control(DTC)for electrically excited synchronous motor(ESM)supplied by indirect matrix converter(IMC)was investigated,where,the rectify stage controls the input power factor,the inversion stage controls torque and stator flux linkage,and all bidirectional switches at line side turn on and turn off at zero current by inserting zero voltage vector at the inverter side.The experimental results are provided to verify its feasibility.
electrically excited synchronous motor;indirect matrix converter;direct torque control
TM341
A
福州大学科研启动基金(2008-XQ-17)
周扬忠(1971-),男,硕士生导师,Email:zhty_75313@sina.com
2010-07-08