伺服环路控制器的数字化设计
2011-03-28罗黎希王小兵周阳辉
罗黎希,王小兵,周阳辉
(中国卫星海上测控部江苏江阴214431)
某船载卫通站伺服系统环路控制由传统的模拟电路实现,封装在环路控制单元抽屉和陀螺控制单元抽屉。环路控制是卫通伺服系统的关键环节,而模拟电路存在分立元件多、器件漂移、抗干扰能力差、变量不易监视等缺点,直接影响了卫通站伺服系统的可靠性。
利用计算机代替常规的模拟控制器形成计算机控制系统是控制工程的发展方向。由于计算机具有很强的计算能力、比较及存储信息的能力,因此它可以实现模拟系统难以实现的复杂控制规律,有效解决漂移、干扰等问题,同时还能获得友好界面。利用计算机控制系统实现伺服环路的数字化可以有效解决模拟电路存在的问题,提高通信系统的稳定性。
1 原理简介
对象,以及连接两部分的模-数(A/D)转换器、数-模(D/A)转换器及实时时钟所组成,如图1所示[1]。计算机通过软件实现所设计的控制规律,数字化的输入信号经特定算法处理后在进行数模转换,送至被控对象,使系统达到预定的指标。

图1 计算机控制系统硬件框图Fig.1 Hardware frame of computer control system
2 模拟控制器的数字化
该卫通站伺服子系统由双闭环消隙交流功放、陀螺稳定(含前馈补偿)环、搜索位置环、快速数引环、自跟踪环、宽带自跟踪环、轴角编码、上、下位计算机、极化控制、锁定控制等组成,各环路均利用模拟电路实现。
计算机控制系统由硬件和软件两大部分组成。硬件部分主要由工作于离散状态下的计算机,工作于连续状态的被控
2.1 模拟控制器电路
模拟环路电路由传统的运算放大器、电阻和电容等基本元件组成。模拟环路电路是天线伺服系统的校正环节,为系统附加一些具有典型环节特性的电网络、运算部件等,有效地改善整个系统的控制性能。图2是卫通站快速数引环的校正电路,通过数学计算可以求解出该校正电路的传递函数,其他环路与数引环类似。

图2 模拟环路电路图Fig.2 Circuit of analog loop
利用运放输入端虚断和虚短特性,结合基尔霍夫电流定理,可写出运放N1两端电路的微分方程组(1)[2]。

微分方程的求解比较复杂,且不利于环路控制特性分析,因此采用拉氏变换将方程组变形为方程组(2),以便求解环路传递函数。

令V调零(t)=0,且可以利用方程组(2)求解出运放N1电路的传递函数公式(3)。

通过同样的步骤可以求得运放N2电路的传递函数公式(4),其中C3为滤波电容。


2.2 数字控制器算法设计
天线模拟控制器是连续系统利用经典的控制方法得出的,如频率特性法、根轨迹法等。选择足够高的采样频率,计算机控制系统可以近似地看作连续系统,通过模拟化设计方法设计数字控制器,即用离散时间控制器近似连续时间控制器,对D(s)进行离散化,得到能由计算机实现的控制算法D(z)[3]。
采用零阶保持器法,将模拟控制器进行离散化。其过程如图3所示,D(z)可以通过公式(6)计算。如果D(s)是稳定的,那么D(z)也是稳定的;但D(z)与D(s)单位冲激响应不同。

图3 零阶保持器法离散控制器过程Fig.3 Process of discrete controller using zero-order holder method


将公式(7)进行变换,就可以得到差分方程公式(8)。

公式(8)即为计算机实现的控制算法,其中e(kT)为输入序列,u(kT)为输出序列,经过计算机语言编程可以轻松实现数字控制器。
2.3 采样周期的选择
采样周期影响天线的控制稳定性和准确性,因此选择合适的采样周期是非常重要的。香农定理给出了理想情况下的采样周期选择规则,但天线控制系统比较复杂,采样周期的选择与很多因素相关。在计算机控制系统实现数字化控制的情形下,模数转换需要使用零阶保持器电路,该电路之后连接连续时间系统会引起系统相移。当采样周期较短时,零阶保持器可展开为[4]。

由公式(9)可以看出,零阶保持器可以被近似为具有半个采样周期的延时环节。工程经验给出法则:乃奎斯特频率取连续系统剪切频率的5~20倍[5]。
卫通天线速度环即为控制器的控制对象,速度环的剪切频率为4~5 Hz,采样频率可选为20~50 Hz,具体数据可根据计算机的硬件配置情况选择。
3 计算机仿真测试
3.1 仿真系统模型
为了验证数字控制器设计的正确性,利用Matlab软件Simulink工具箱进行计算机仿真[6]。建立仿真系统首先应确定被控对象的数学模型,由于从控制器输出到天线转角经历了功放、电机、减速器和天线体等多个环节,被控对象的模型非常复杂。在实际设计过程中,通过测试天线的频响特性来估计被控对象模型。根据工程经验,被控对象可近似为两个振荡环节,由于系统设计带宽较低,频率较低的振荡环节对控制系统影响很大,而频率较高的振荡环节可忽略。因此被控对象可看作一个二阶振荡环节。
控制器电路中,各元器件的参数如下:R6=33 kΩ,R7=33 kΩ,R9=33 kΩ,R10=1 MΩ,R11=33 kΩ,R13=1 MΩ,C1=0.47 μF,C2=4.7 μF。可根据参数写出模拟控制器的传递函数D(s)=取采样时间T=0.02 s利用公式(4)求出数字控制器建立仿真模型如图4所示。
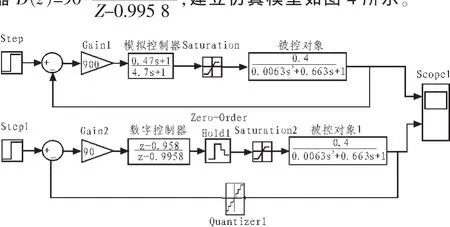
图4 分别由模拟控制器和数字控制器构成的天线模型Fig.4 Antenna model of analog controller and digital controller
3.2 测试结果
设模拟控制器构成的控制系统为a系统,数字控制器构成的系统为b系统,系统输入均为单位阶跃函数,b系统的输入函数、量化器、零阶保持器采样时间均设为0.02 s。利用双通道示波器同时观察系统输出,仿真结果如图5,由仿真结果可以看出,b系统的输出与a系统基本一致,数字控制器可以替代模拟控制器。
4 结束语

图5 两种模型的输出结果对比Fig.5 Comparison between two models
为了提高卫通天线伺服系统的稳定性和可靠性,本文分析了伺服环路的模拟控制器电路,利用计算机控制系统相关技术,将模拟控制器设计为数字控制器。通过Matlab软件Simulink工具包的仿真计算,证明了数字控制器设计的正确性。根据本文提出的算法,结合计算机语言,可以将伺服环路中所有模拟环节数字化,以提高天线伺服系统的稳定性和可靠性。
[1] 董景新,赵长德,熊沈蜀,等.控制工程基础[M].2版.北京:清华大学出版社,2003.
[2] 藤井信生.电子实用手册[M].北京:科学出版社,2001.
[3] 丁锋,屈明昌.交流伺服系统控制方法[J].电子机械工程,2003,6(4):87-89.DING Feng,QU Ming-chang.Control method of AC servo system[J].Electronic Mechanical Engineering,2003,6(4):87-89.
[4] 管致中,夏恭恪,孟桥.信号与线性系统[M].北京:高等教育出版社,2005.
[5] 蒋大明,戴胜华.自动控制原理[M].北京:北方交通大学出版社,2003.
[6] 赵长德,郭美凤,董景新,等.控制工程基础实验指导[M].北京:清华大学出版社,2007.