ISAR舰船目标成像时间段选取
2011-03-14姜义成
王 冉,姜义成
(哈尔滨工业大学电子工程技术研究所,150001哈尔滨,wr0905@sina.com)
逆合成孔径雷达(ISAR)是一种为人们熟知的获得远距离非合作运动目标雷达图像的技术.目前当海情较高(3级以上海情)时,舰船目标的ISAR成像来源主要是海浪起伏引起的舰船摇摆运动.由于舰船运动复杂,在实际成像环境中海情和舰船运动状态未知,变化难以预料,成像具有较高难度.若正确选择成像时刻和成像积累时间,利用舰船的自身摇摆可在较短的合成孔径时间内得到有利于舰船目标识别的高质量图像.ISAR舰船目标实测数据在进行成像处理之前,应选择合适的成像时刻和成像积累时间,以得到最利于目标识别的清晰图像.传统的方法是对运动补偿之后的数据进行多普勒中心估计,据此来确定成像时刻和成像积累时间[1-4].这种方法的优点是计算量小,便于快速实现,而且可同时得到最佳成像时刻和最佳成像积累时间的估计值.缺点是无法根据对回波数据的分析得到舰船目标的最佳俯视图和侧视图的成像时刻,而这对于舰船目标的识别是很重要的.根据对舰船在高海情下三维转动的特点,文献[5-6]提出了一种可得到舰船目标最佳俯视图和侧视图成像时刻的方法.这种方法克服了多普勒中心估计法无法得到舰船目标的最佳俯视图和侧视图成像时刻的缺点,但是实现比较复杂,运算量偏大,限制了它的应用范围.
本文对文献[6]的成像时刻选择方法进行了改进,形成1个清晰的成像时刻选取的流程.通过该流程可确定ISAR舰船目标最佳俯视图和侧视图的成像时刻.定义了图像对比度,并以此为标准来确定最优成像积累时间.最后,用实测数据验证了本文方法的有效性.
1 图像对比度准则
首先对ISAR原始数据进行处理,得到1幅ISAR图像记为I(m,n,a,b),其中含有m个多普勒单元和n个距离单元,a为成像起始时刻,b为成像积累时间.定义图像对比度SIC(a,b)为

式中:E是对于变量m、n取均值的算子.由式(1)可见,SIC是I(m,n,a,b)的归一化标准差.SIC(a,b)可作为衡量1幅ISAR图像聚焦的标准.
在式(1)中,分子是图像矩阵的标准差.以多散射点模型为例,可以看出当图像聚焦很好时,图像矩阵中第i个散射点(mi,ni)位置处及其附近很小的邻域Ui内将出现远大于图像均值E[I(m,n,a,b)]的幅度值I(mu,nu,a,b),其中(mu,nu)∈Ui,u=1,2,…,i,…,此时图像的标准差会很大;而当图像聚焦很差时,图像矩阵中各点幅度值I(m,n,a,b)都围绕在图像均值E[I(m,n,a,b)]附近,此时图像的标准差要比聚焦好时小.因此图像聚焦越好,SIC就会越大.
式(1)中的分母代表了该幅图像幅度的均值,运用它对SIC进行归一化.这样做的意义在于便于用图像对比度对多个不同大小的图像进行聚焦程度的比较.
2 基于图像对比度最大准则的最优成像时刻和最优成像积累时间的选择
由式(1)可见图像对比度是该幅图像成像起始时刻a和成像积累时间b的函数.因此,最优成像时刻和最优成像积累时间的选取问题,可转化为求当SIC(a,b)取最大值时a、b的取值问题,即

因为a与b都是离散变量,因此这是1个求解二维离散函数极值的问题.通常一段ISAR回波数据中包含上万个回波信号,因此直接对SIC的极值进行搜索,计算量将相当大.文献[7]提出了一种将二维搜索简化成2个一维线性搜索的方法:
1)设b=bin,其中bin为b的初始值.bin由不同的ISAR系统参数及目标类型决定.计算
3 舰船目标最佳俯视图和侧视图成像时刻选取
本节对文献[6]的舰船目标成像时刻的选择方法进行了改进,提出了新的舰船目标最佳俯视图或侧视图的成像时刻选择方法,如图1所示.
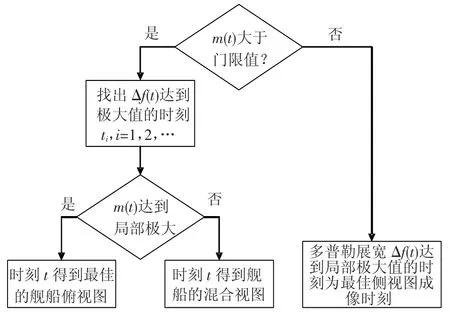
图1 舰船目标最优成像时刻选取流程
图中m(t)为船体中心线斜率函数,Δf(t)为多普勒展宽函数,它们都是慢时间的函数.m(t)与舰船有效转动角速率的垂直分量以及雷达视角的正切函数成正比.由于在观测期间内雷达视角变化很小,因此m(t)可以反应舰船有效转动角速率垂直分量的大小.Δf(t)随时间的变化反映合成有效转动角速率的变化.当舰船有效转动角速率的垂直分量占主导地位,即m(t)取局部极大值时,将得到舰船最佳俯视图.当舰船有效转动角速度的水平分量占主导地位,即Δf(t)取局部极大值,而m(t)取局部极小值时,将得到舰船目标的最佳侧视图.因为这样的Δf(t)和m(t)取值表明舰船的合成有效转动角速率局部最大,同时它在垂直方向上的分量局部最小,因此它在水平方向上的分量很大,而合成有效转动角速率的水平分量正是舰船目标侧视图的成像来源.
估计舰船中心线斜率函数m(t)的步骤如下:
2)由于海杂波干扰和短时间距离多普勒成像的聚焦性不佳,对时间段内的图像选择一灰度门限ITh,小于门限的像素灰度设为零,其中门限ITh=IMAX/10;
3)然后对图像Hough变换,选出变换后图像的最大值点,即可求出最大值角度θ,根据Hough变换的定义,舰船中心线的角度值为mi=θ+ 90°.
估计多普勒展宽函数Δf(t)的步骤如下:
2)由于海杂波干扰和短时间距离多普勒成像的聚焦性不佳,对时间段内的图像选择一灰度门限ITh,小于门限的像素灰度设为零,其中门限的大小可设定为图像灰度最大值的1/10左右,即ITh=IMAX/10;
3)对距离单元进行逐个搜索,找出第j号距离单元内的所有舰船散射点,并记录下这些散射点中多普勒值最小的点与多普勒值最大的点的多普勒值fj,min与fj,max,其中取fj,min最小值记为fmin,记fj,max最大值为fmax.其差值fmax-fmin为该幅图像的多普勒展宽,记为Δfi.
用以上方法可得到ISAR舰船图像的最优俯视图或侧视图的成像时刻^a.然后计算式(2)得到最优成像积累时间^b的估计值.需注意的是,这里的^a是以回波数来表示的,它和慢时间t是一一对应的关系.
本文方法相对于文献[5-6]的改进有如下两点:
1)在估计舰船中心线斜率函数m(t)和多普勒展宽函数Δf(t)时,短时成像采用了距离多普勒算法,而没有如文献[5]那样采用短时傅立叶算法.这是因为在很短的成像积累时间内,舰船的运动是近似平稳的,因此用距离多普勒算法进行短时成像可以满足计算精度的需要.而且该方法相比短时傅立叶变换法计算量大大降低,也不存在短时傅立叶变换法由于变换本身时频聚集性不高而导致的成像模糊的缺点.
2)本文对文献[5-6]中的俯视图和侧视图选取的方法进行了整合,可以更清楚的反映出俯视图和侧视图成像数据段选取的本质.整个过程也简洁实用,如图1所示.
4 实测数据验证
采用某段舰船目标的ISAR实测数据对上述方法进行验证.首先用第3节提出的方法确定最优成像时刻^a.用于快速成像的时间段Tib长度为512个回波,采用距离-多普勒(RD)算法进行成像.依次得到船体中心线斜率m(a)和多普勒展宽单元数Δf(a)对开始积累回波数a的变化.由图1和如下所示的图2可知,回波数a=2 048时,Δf(a)达到最大值,这时m(a)并不处于最大值.因此,^a=2 048时将得到舰船目标的最佳侧视图.回波数a=512时,m(a)处于最大值,因此,舰船运动以偏航为主,但此时Δf(a)并没有达到最大.因此,^a=512时将得到舰船目标相对较好的俯视图.图3为积累回波数b与图像对比度SIC的关系.b从1 024个回波开始,每次增加12个回波.其中图3(a)为a=2 048的情况,在^b=1 156时SIC取最大值16.817.图3(b)为a=512时的情况,在^b=1 552时SIC取最大值16.698.
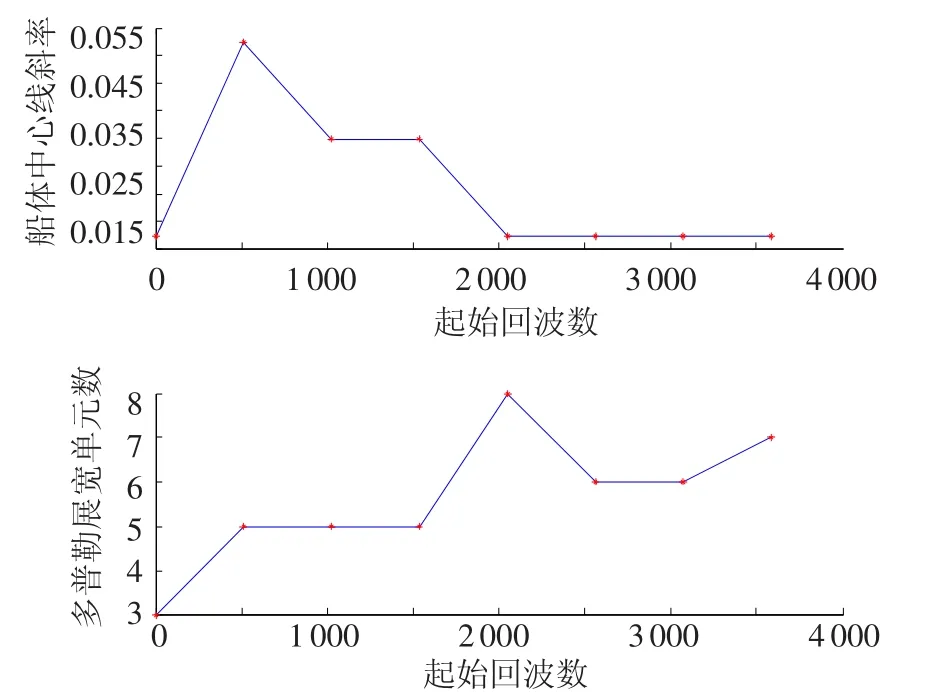
图2 舰船实测数据船体中心线斜率和多普勒展宽
图4为舰船实测数据的最终成像结果.图4(a)为^a=2 048,^b=1 156条件下舰船目标的距离-多普勒(RD)算法成像结果.从图中可见,在^a=2 048,^b=1 156时得到了舰船最佳侧视图,而且聚焦度很好.图4(b)为 ^a=512,^b= 1 552条件下舰船目标的距离 -多普勒(RD)算法成像结果.从图中可见,在^a=512,^b=1 552时得到了舰船比较好的俯视图,这从舰船图像最左侧的部分和图4(a)对比可以看出,聚焦度也很好.图4验证了本文算法的有效性.因为采用的是RD算法完成最后的成像,所以相对于时频分析方法计算量也很小.
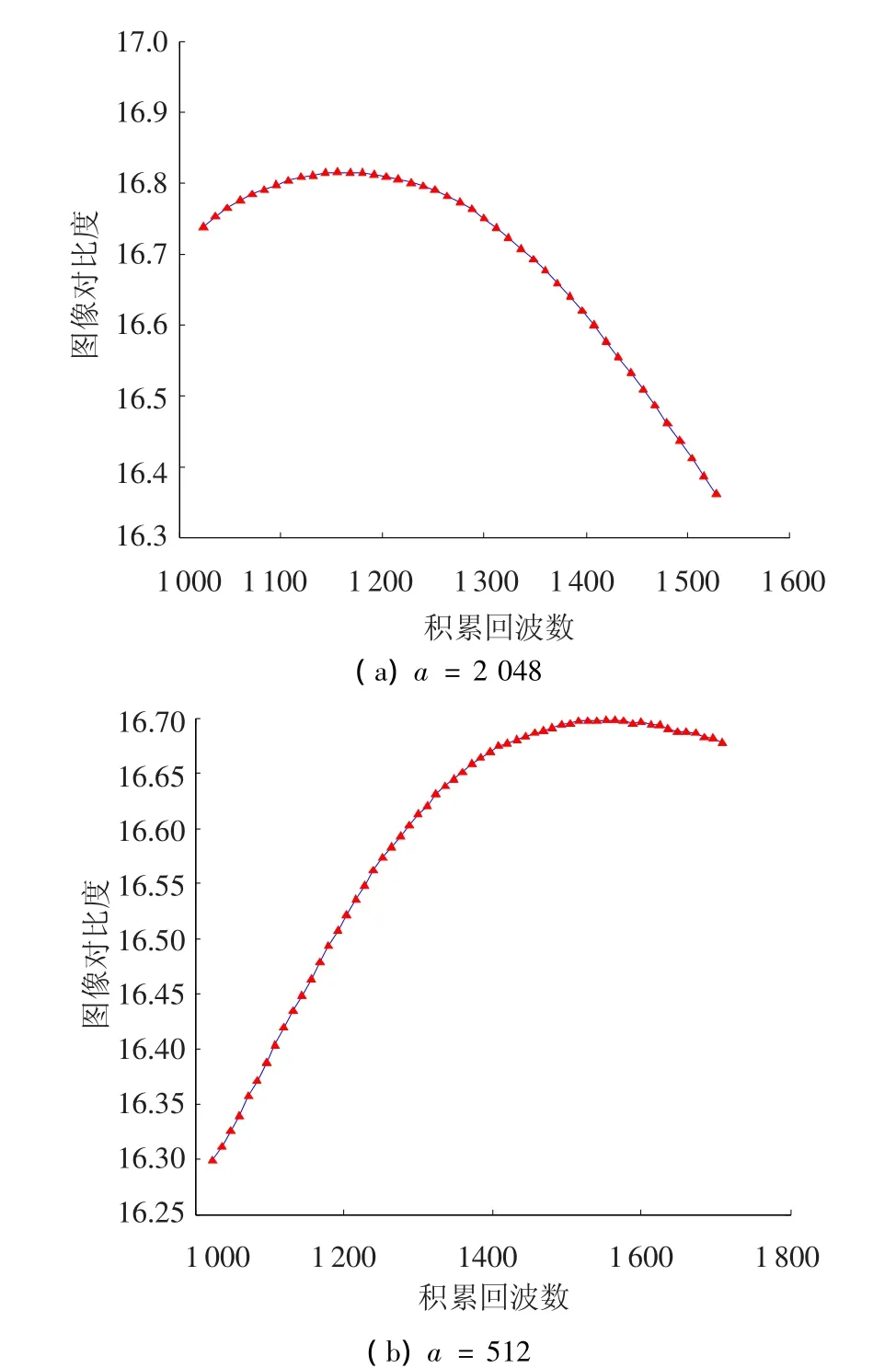
图3 积累回波数b与图像对比度SIC的关系
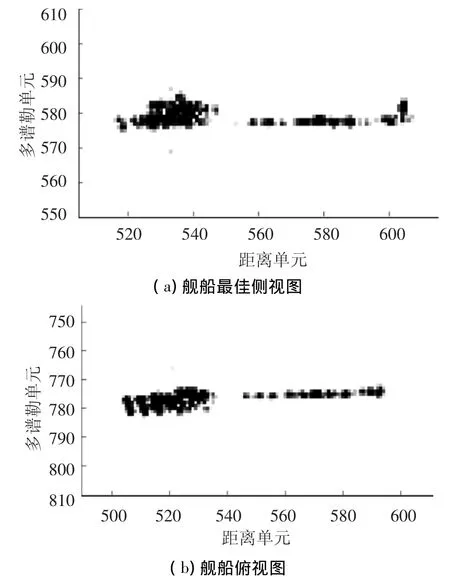
图4 舰船实测数据最终成像结果
5 结论
针对ISAR舰船目标的成像数据段选取问题,本文对现有的几种成像数据段选取方法进行了归纳.在简要总结了这些方法的优缺点的基础上,采用图像对比度准则作为评价ISAR图像聚焦程度的标准.根据ISAR舰船目标成像的特点,为得到便于目标识别的舰船俯视图和侧视图,对文献[6]的成像时刻选取方法进行了改进,首先得到舰船最优俯视图或侧视图成像时刻,再通过使图像对比度最大得到最优的成像积累时间.舰船实测数据的成像结果验证了本文方法的有效性.
[1]SMITH A M.A New approach to range-doppler SAR processing[J].International Journal of Remote Sensing,1991,12(2):235-251.
[2]RANEY R K,RUNGE H,BAMLER R.Precision SAR processing using chirp scaling[J].IEEE Trans on GRS,1994,32(4):786-799.
[3]SUN Haiping,XING Mengdao,ZHOU Lijuan.Division of imaging intervals and selection of optimum imaging time for ship ISAR imaging based on measured data[C]//Proceedings of CIE International Conference on Radar 2006.Shanghai:[s.n.],2006:983-986.
[4]阮敏,罗代升,陈默,等.SAR成像系统中多普勒中心频率fD和模糊数m的估计[J].四川大学学报(自然科学版),2005,42(5):963-968.
[5]汪玲,朱兆达,朱岱寅.机载ISAR舰船侧视和俯视成像时间段选择[J].电子与信息学报,2008,30 (12):2835-2839.
[6]PASTINA D,MONTANARI A,APRILE A.Motion estimation and optimum time selection for ship ISAR Imaging[C]//IEEE Radar Conference 2003.Huntsville:[s.n.],2003:7-14.
[7]MARTORELLA M,BERIZZI F.Time windowing for highly focused ISAR image reconstruction[J].IEEE Trans on AES,2005,41(3):992-1007.