A Classification Algorithm for Ground Moving Targets Based on Magnetic Sensors
2011-03-09CUIXunxue崔逊学LIUQi刘綦LIUKun刘坤
CUI Xun-xue(崔逊学),LIU Qi(刘綦),LIU Kun(刘坤)
(1.Military Network Engineering Department,Artillery Academy of PLA,Hefei 230031 Anhui,China;2.Intelligence Information Department,Artillery Command Academy of PLA,Xuanhua 075100 Hebei,China)
Introduction
Target detection technology based on abnormal magnetic signal is an important means of military intelligence collection.It has the advantages of passive detection,excellent concealment characteristics,higher anti-jamming ability and good secrecy.With the increase in measurement precision of magnetic sensors,the target detection technology based on abnormal magnetic signal has found application in many fields.
Usually a moving target may disturb the distribution of earth magnetic field to create an abnormal magnetic field distribution and disturbance.Some characteristics of a target can be obtained by measuring the distribution of abnormal magnetic signal and extracting its feature[1].Most of weapons and equipment are made of iron and magnetic material so that they can produce an evident disturbance signal of earth magnetic field.Consequently,the abnormal magnetic signal detection technology is to measure the abnormal magnetic signal from the background of earth magnetic field based on the above physical phenomenon for estimating the detection information of military targets[2-3].
Target can be detected and recognized according to the effect of different targets on the earth magnetic field to different extents.In the paper a classification algorithm based on abnormal magnetic signals is proposed for ground moving targets.Magnetic sensors are used to collect the disturbance signals of earth magnetic field from a moving target.The type pattern match of target signatures can be verified by training the statistical samples and designing a classification machine.Three common targets in the ground battle field have been tested and analyzed in the paper.
1 Principle of Target Classification and Recognition
1.1 Classification of Magnetic Moving Targets
The attribute of magnetic disturbance can be adopted to classify various magnetic targets,e.g.armored tank,wheeled armored vehicle and military jeep.When those targets pass by a magnetic sensor,the sensor can detect the magnetic disturbing vectors of different parts of a target.The variation of magnetic field reflects the magnetic feature of a target[4].
Usually target classification is based on a tactical application.In the paper the target classification is based on disturbance extent of magnetic signal,which is different from traditional methods of target classification.According to the chassis features of military vehicles and their disturbance feature of earth magnetic field,the representative ground mobile targets are divided into combat vehicle,wheeled carry and transportation vehicle,and special light vehicle[5].
The combat vehicle is a tracked one,which uses a tank chassis.A wheeled carry and transportation vehicle has a low basic frequency,and the noise magnitude of its engine is small.Generally the special light vehicle is driven by its wheels,which is often refitted from cross-country vehicle or ordinary car.The special light vehicle is powered by a gas engine,which is similar to civil cross-country vehicles and jeeps.
1.2 Principle of Target Classification
Anisotropic Magneto-resistive(AMR)sensor is a kind of micro sensor to measure earth magnetic field.As the earth magnetic field exists,the AMR sensor would yield a differential voltage even if it is not activated by applying a man-made magnetic field.Here a vehicle(especially chassis)is considered as a huge ironcontaining object,thus it would disturb the earth magnetic field around the sensor when it passes by the sensor,and the output of AMR sensor would also change with the magnetic field disturbance.This is the sensing principle and reason why AMR sensors are used to detect a moving target.Moreover,according to the fact that different chassis bring different intensive disturbances to the earth magnetic field,some important features of vehicles can be judged and analyzed.
Various targets produce different disturbances of earth magnetic field when they pass by a sensor.A data collecting system of magnetic sensor yields a special wave shape according to the kind of a target.If a feature pattern is matched to the output wave shape,we can identify the sort of the moving target[6].
2 Algorithm Model of Target Classification
Target classification is a pattern match method in that an undetermined objective is recognized as a certain sort in the feature space.The basic idea is that a judge rule is decided based on a set of training samples,so as to minimize false classification and recognition loss of an undetermined target according to this judge rule.A classification algorithm with the rule style has a smaller computation cost than intelligent optimization methods,such as neural network and genetic algorithm[7].Therefore it is easy for computer program to execute it rapidly,give the output in real time and provide immediate information for a military action.
The target classification algorithm proposed in the paper contains the following three modules.
2.1 Data Preprocessing
When a moving target passes by the sensitive axes of a magnetic sensor,the earth magnetic field is disturbed and the output voltage of the sensor is changed.The voltage value is magnified through an amplifier,the promiscuous signals are filtered by a filter,and then the A/D conversion of magnetic signal is performed using an A/D converter.The collected data is transferred to a computer by a serial interface,and saved in a database to be taken as the feature signal of the moving target.
Data preprocessing is to adjust the collected magnetic signals,because different vehicle velocities may result in the different numbers of collected data.In fact,the mobile targets are impossible to travel at a uniform velocity.When a moving target passes by the sensor at a different velocities,the collected data from the identical target are also varied,as shown in Fig.1,where some dots about high velocity of a moving vehicle are on the left,and some dots about low velocity of the moving vehicle are on the right[8].In the data preprocessing phase,the collected data should be uniformly transferred and gotten into a standardization formation according to a standardized time scale.
It can be known from Fig.1 that,when the output wave shape at low velocity is compared to that at high velocity,its number of sample dots increases with a detection time,and the output voltage quantity is a little small.Assuming that n is the standard dimension of a feature vector,k is the dimension of a sample feature vector,β is calculated as the conversion coefficient of transverse axis x as follows
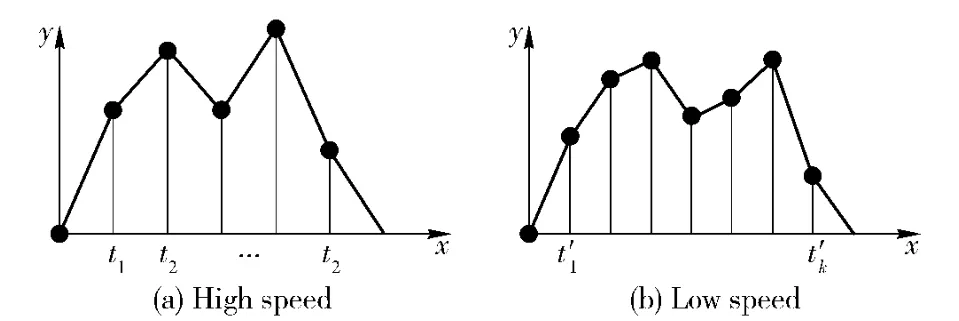
Fig.1 Sample dots of two movement velocities of a vehicle

In the paper a method of average region division is used to transfer axis x,regardless of the velocity of a moving target and the collecting time,the collecting time is uniformly divided into 20-40 sections.The number of time sections equals the dimension(n)of standard feature vector.Signal data is extracted from the regions in turn,and the time scale of x axis is standardized.Of course,different dimensions can be chosen according to various precision goals in some applications.The larger the dimension is,the higher the match precision between the transferred result and the original signal output is.The computation cost may increase linearly for a higher pattern match precision.
AMR sensor responds to a fast moving target more intensively than a slow moving one.The sample dot figure of target moving at high velocity seems to be elongated in the longitudinal direction.This aspect also influences the target recognition.
Supposing that V=(v1,v2,…,vn)is the feature vector of an undetermined target,n denotes the sample dot number after data preprocessing,R=(r1,r2,…,rn)represents the standardized feature vector.For each kind of target,the transfer of y axis is accomplished by adding a scope decrease factor(λ).The definition of λ is given by where i=1,2,…,n;j=1,2,…,k.

The sampling time(t1,t2,…,tn)of a standardized feature vector is transferred in turn into a new formation(t'1,t'2,…,t'n),the result is given by

If t'ion x axis is the original sampling time,i.e.the time of transferred sampling dots is identical with the initial sampling time,its sampling value(v'i)equals the value of ith dot.If t'iis not the sampling time,i.e.it is between the sampling time bounds[ta,tb],a linear interposition technique can be used to simplify [ta,tb]as t'i.Thus all sampling processes are transferred into a uniform formation with standardized data.
When the moving velocity of a target is higher than the velocity of standardized sampling in a database,the recognition method is similar to the above method.However some dots are selected to insert the bound between two sampling dots,and then the match and recognition process is executed.
Figure 2 shows a set of actual data which was obtained from magnetic disturbance of a moving target.As the moving velocity is higher than the standardized velocity,i.e.the number of sampling time dots is smaller than scheduled dimension(40),at the data preprocessing phase the standardization procedure is completed to produce a standardized pattern data shown in Fig.3.From the comparison between the two figures,it can be seen that the amplitude of output voltage signal on the vertical axis was altered,which was adjusted from about 2.3 mV to below 0.25 mV,the latter reflects a standardized bound after normalization.
2.2 Sample Training
Sample training is to extract the target features for classification and recognition.Since the peak value and width of voltage output from a magnetic resistive sensor are correlative to the moving velocity of target,they cannot be taken as the feature pattern of target.Consequently only the voltage output dots can be used to as the classification feature.
The typical method of determining classification is to use a set of known sample objects to train a classifi-cation machine.We had collected the magnetic signal data of battle vehicles,wheeled carry and transportation vehicles,and special light vehicles on actual roads.When the three kinds of targets move by a magnetic sensor,the sensing node collects the disturbance data of magnetic field.The signal data from the same kind of target are averaged after preprocessing.The average feature vector of many signals from the three kinds of targets is saved in a database after they are trained.
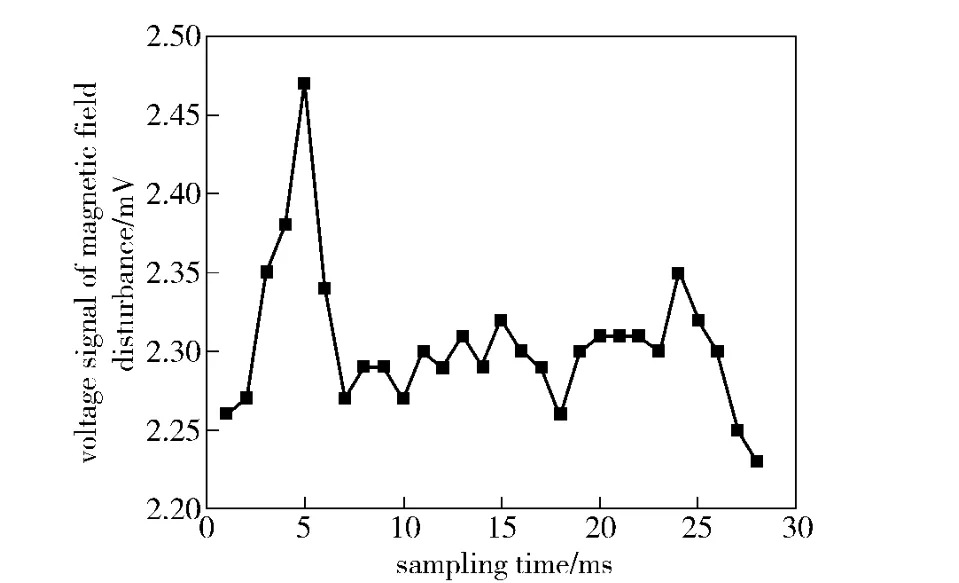
Fig.2 Original data of actual magnetic field disturbance signal created by a moving target
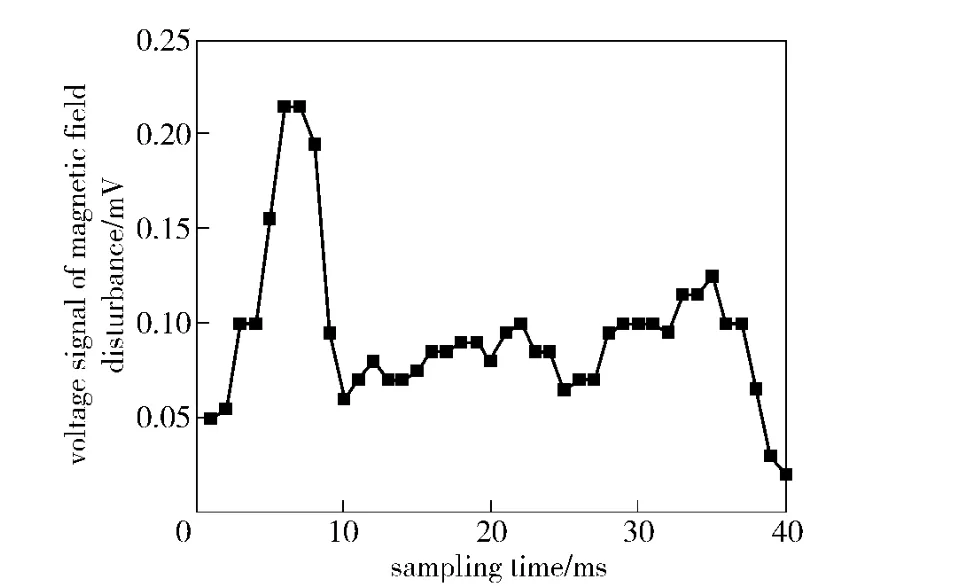
Fig.3 Standard pattern data of magnetic field signal after data preprocessing
These standard feature vectors are selected as the classification source of subsequent test and application.A training set is just a group of objects which have been correctly recognized in each kind of targets.These objects are measured,their sample square differences are calculated,and then those differences are provided for the subsequent recognition processes so as to increase the correctness of classification.
Figure 4 shows the standard patterns of magnetic disturbances of 3 targets,which are obtained after some collected data had been trained in a sample style.It is obviously seen from Fig.4 that the three kinds of targets are very different from each other by their data.From their data dots,we can find that the average signal output of special light vehicle is the smallest,the output signal of battle vehicle always keeps in a high level,and the signal of wheeled carry and transportation vehicle is lumpy when it passes by a sensing node.

Fig.4 Standard patterns of earth magnetic disturbance of three target kinds
For a new set of sampled data,the most approximate standard pattern can be found through comparison,thus the kind of target corresponding with this standard pattern is selected as the classification result of the pattern recognition process.
2.3 Design of Classification Machine
For a new signal produced by a moving target,the similarity between its feature and other typical target feature is computed by the classification machine so as to the sort of this target.Here the classification machine is designed according to the minimization rule,i.e.the difference value of feature comparison is minimized such that the computation cost of the classification method is very low.The function of classification machine is designed as follows

where V=(v1,v2,…,vn)is the feature vector of the undetermined target,n is the sampling dot number after data preprocessing,R=(r1,r2,…,rn)denotes the standard feature vector,δ represents the standard variance of training classification machine which function is to adjust the classification error.
Assuming that k is the training times of an identical type of vehicles,and E(X)denotes the mathematically expected value of a set of training statistical samples.E(X)is calculated by

To program on a computer easily,here we design δ as follows

3 Experimental Results
3.1 Experimental Scheme
Magnetic resistive sensor HMC1021Z is adopted as a sensor node in the experimental system,its microprocessor is ATmega128L,and CC2420 chip is taken as the communication chip.The sensitivity of HMC1021Z is 1mV/V/Gs,the biggest value of earth magnetic field is 0.6 Gs,the lowest supply voltage is 5 V,and thus the highest differential voltage of the sensor node is 3 mV.The lowest bandwidth is 2 kHz,as a result a vehicle running at 400 km/h can be sampled once a 56 mm distance,which can satisfy the sensing requirement of moving targets.
The analogue digitalconverter (ADC) in C8051F310 single chip micyoco is used here.If the conversion speed is too slow,the disturbance of earth magnetic field due to a moving target can not be caught.On the contrary,if the conversion speed is too fast,the load of the sensing system may be increased such that the limited power of the sensor node is wasted.Thus a trade-off sampling rate should be determined.If the average velocity of a moving target is 100 km/h,i.e.the target moves 27.8 m within 1 s,the sampling rate of the system is 83.4,according to a fact that three dots are collected at least as the target moves 1 m.Accordingly the sampling frequency of the magnetic sensor in our node system is determined as 90 Hz.
A highly hard shell is assembled to the sensor node in our experiment.The sensor node is put at the bottom of a vehicle.The experimental site was a road where many vehicles passed by the magnetic sensor,and their movement directions were vertical to the sensitive axis of the magnetic sensor.Thus a maximum amount of magnetic signal disturbance was collected in the experiment.
As the sensor only has one sensitive axis,the disturbance values of magnetic field on this axis can be collected,which is not dependent on the detailed placement orientation of our sensor node.When the direction of a moving target is not really vertical to the magnetic sensitive axis,the amplitude of collected signals should be decreased to influence the correctness of target classification.Here supposing that the targets run on an unidirectional road.In the experiment the route of moving targets was limited at a certain extent.
The rule of target detection is determined in the experiment as follows:if 10 successive sampling values exceed the predetermined threshold value,it can be judged that a target is passing by the sensor node;if 10 successive sampling values are below the threshold value,it is concluded that the target has left.A threshold value is determined from the statistical test data which is related with detailed sensor chip types.
3.2 Experimental Results and Analysis
To verify and evaluate the performance of our algorithm,some field experiments were finished.A wave curve example of the three kinds of targets is illustrated in Fig.5.A maximum point deviated from baseline value exists in each curve in Fig.5,which is a peak signal generated by the engine.Usually the secondary peak points are generated by the hinder axle and the bumper of vehicle.It has been shown that the feature and information of target can be detected as long as the sampling rate is rapid enough and the resolution is high enough.
Figure 6 shows a comparison example of the standard samples and a set of signal data of a target ready for recognition after preprocessing.It can be seen from Fig.6 that the signal feature of the target is more similar to the feature pattern of the special light vehicles.The computed result shows that it is the best match pattern of the special light vehicles.
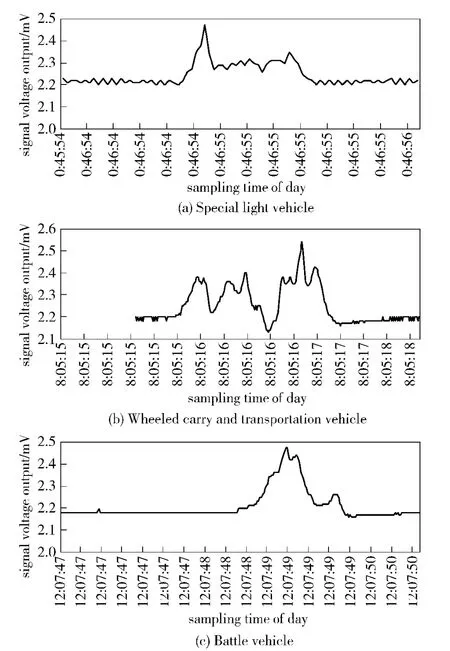
Fig.5 An original sampling signal wave curves of three targets

Fig.6 A comparison example of standard samples and the preprocessed target signals
Some experimental results of target classification are listed in Table 1,the experimental results show that the classification correctness of the recognition algorithm proposed in the paper can reach 80%.However,since the sampling data from battle vehicle with tracks is lacking for our experiment,the training error of samples is a little high,which influenced the total classification correctness to a certain extent,as listed in Table 1.
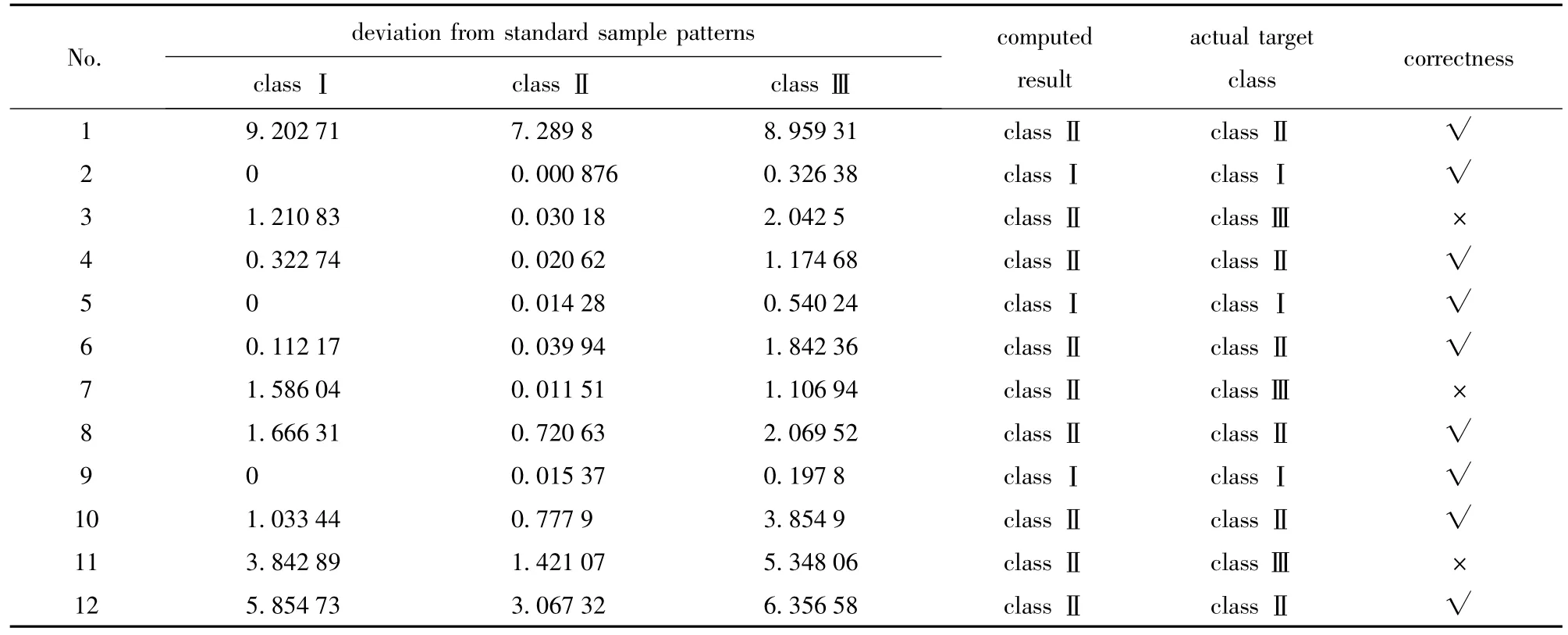
Table 1 Some experimental results of target classification
4 Conclusions
A novel classification algorithm based on abnormal magnetic signals is proposed for ground moving targets which are made of ferromagnetic material.Typical ground moving targets are divided into three classes,including battle vehicle,wheeled carry and transportation vehicle,and special light vehicle.Through a data preprocessing and a sample training,a classification machine model is designed to match the patterns of target sorts based on the magnetic field signals from a moving target.
Experimental results show that the classification algorithm is feasible,and it has the advantages of low computation cost and high classification correctness.This recognition method can also be applied to other complicated classification problems of magnetic moving targets.Furthermore,when the classification algorithm is being run,it is only used to preprocess the collected signal data and compute the shortest distance of neighboring feature pattern.Thus it has a very low computation cost,and has a good real time performance.
[1]Honeywell.Vehicle detection using AMR sensors:application note-AN128:1-2[EB/OL].[2003-01-01]Http:∥www.magneticsensors.com.
[2]ZHANG He.Detection and recognition technology[M].Beijing:Beijing Institute of Technology Press,2005.(in Chinese)
[3]ZHOU Li-wei,LIU Yu-yan.Target detection and recognition[M].Beijing:Beijing Institute of Technology Press,2002.(in Chinese)
[4]Cheol Oh,Stephen G R.Recognizing vehicle classification information from blade sensor signature[J].Pattern Recognition Letters,2007,28(9):1041 -1049.
[5]Ding J.Vehicle detection by sensor network nodes[D].Berkeley CA:University of California,2003.
[6]Brooks R,Amanath-AN P,Syeed K M.Distributed target classification and tracking in sensor networks[J].Proceedings of the IEEE,2003,91(8):1163-1171.
[7]CUI Xun-xue.Multiobjective evolutionary algorithms and their applications[M].Beijing:National Defense Industry Press,2006.(in Chinese)
[8]FANG Hai-qian,DUN De-cong.Research of vehicle type recognition based on pattern match[J].Microcomputer Applications,2002,18(4):20 -23.(in Chinese)
杂志排行

Defence Technology的其它文章
- Study on Outboard Inductive Damping Valve in Hydro-pneumatic Suspension
- Cooperative Navigation for Autonomous Underwater Vehicles Based on Estimation of Motion Radius Vectors
- Fuzzy Jamming Pattern Recognition Based on Statistic Parameters of Signal’s PSD
- Study on Instable Combustion of Solid Rocket Motor with Finocyl Grain
- A GNSS Signal Blind-decoding Algorithm at Low SNR
- Study of Load Modeling Technology on Hardware-in-the-Loop Simulator of Gun Servo System