考虑前车减速状况的跟随车安全距离分析
2011-02-28郑茂才
郑茂才
(湖南省农林工业勘察设计研究总院,湖南长沙 410007)
0 前言
随着高速公路的迅速发展,高速公路的交通事故一直呈上升趋势。而追尾碰撞是高速公路交通事故的主要类型之一。如何防止追尾碰撞事故,确定跟随车的临界安全车距,显得尤为重要。而安全车距数值的多少,根据汽车运行中的速度高低、气候、道路的好坏、驾驶员反应的快慢和汽车制动的技术状态等因素综合分析累计而成。然而在很多的追尾碰撞事故中发现:当前车已非正常制动减速时,跟随车往往会发生追尾碰撞交通事故。没有考虑前车减速状况的跟随车安全车距缩小了它的适用范围,降低了它的指导行车安全的科学性[1]。针对此缺陷,本文通过研究前车不同的减速状况、驾驶员的不同反应时间与跟随车安全车距的关联,建立新的跟随车安全车距公式,对减少“尾碰撞”事故,更好地、科学地指导安全行车,促进交通安全具有现实的意义。
1 传统的临界安全车距计算公式
1.1 定义
安全车距:即安全行车间距,指行驶在高速公路上同一车道的后车与前车之间为保证交通安全而必须保持的行车间距,如果前、后两车行车间距保持在此距离以上,则不会发生追尾碰撞类交通事故。
临界安全车距:即临界安全行车间距,是指为保证安全而两车之间必须保持的最小行车间距[2]。
1.2 传统的临界行车安全车距计算公式的推导
根据参考文献[3,4],传统的临界行车安全车距计算公式的推导如下:设1号车为前车,2号车为后车,当后车驾驶员发现前车制动信号灯亮时随之制动直至停车,需要经过3段时间:即后车驾驶员制动感觉反应时间t1、后车制动协调时间t2和持续制动时间t3
[5],在这3段时间内汽车所行驶的距离分别为S1、S2和S3。它们的和为后车的制动行驶距离SF。t1时间内后车做匀速运动。t2可以分为制动传递延迟时间t′1和制动增长时间t″2。那么t′1时间内仍然以匀速运动来计算;t″2时间内,制动力成线型增长为变减速运动,经积分变换后可求得该段时间内所走距离。在t3时间内,后车做匀减速度运动。车速以m/s为单位,距离以m为单位,可以求出SF为:
式中:V0为后车制动前的初速度;ja2为后车的制动减速度。
令t=t1+t′2。通常称t为制动操作反应时间,它包括驾驶员的制动反应时间和制动传递延迟时间,又因t″2非常小,故可忽略不计,则后车的制动行驶距离公式简化为:
对于前车来说,从后车发现其制动信号灯亮算起到制动停车止,前车所走的距离应是该车持续制动时间内所走的距离。可得前车的持续制动距离简化公式为:

式中:SQ为前车持续制动距离;ja1为前车制动减速度;V0为前车制动前的初速度,因高速公路为稳定交通流,可认为前后两车的初速度是相等的。
所以临界安全车距为:

式中:SV为前后两车的行车安全距离;S0为制动停车后前车车尾距后车车头间的安全间距。
2 传统的临界行车安全车距计算公式分析
通过上面的计算公式的推导过程来看,笔者发现其公式的推导以前车正常制动为条件,即前车处于正常的减速状态。但交通事故往往发生在车辆不是以正常制动的情况下。从定义来看,临界安全行车间距,是指为保证安全而两车之间必须保持的最小行车间距。然而以此为条件的临界安全车距并不能保证车辆的安全,并且还有可能诱发连环追尾碰撞的交通事故。
传统计算临界安全车距公式以前车的正常的减速状态为条件,即前车以正常制动减速度ja1,使前车的速度变为0[5,6]。然而当前车发生交通事故时,前车并非以正常的制动减速度方式停止,即前车并非以正常制动减速度ja1使前车速度变为0。当前车发现前面有障碍物或者紧急的情况,前车有3种形式是速度变为0。
第一种形式:前车以正常的制动减速度使得速度变为0,也就是传统计算公式中所用的条件,即前车以正常的减速度ja1使前车的速度变为0,那么在此种情况下,临界安全车距公式(4)是具有很好的指导意义的。
第二种形式:当前车发现前面有障碍物时或者有紧急情况,前车开始以正常制动,但是由于各种原因,前车速度还没有变为0时,前车就与障碍物相撞。前车与障碍物相撞后车速变为0。
假设1号车发现前方有障碍物或者紧急情况时,经过反应及动作时间,汽车以制动减速度ja1作匀减速阶段,最后以车速Vc与障碍物相撞。那么在此段时间内,前车行驶的距离为:

当2号车发现1号车制动信号灯亮,2号车制动行驶距离SF为公式(2)计算所得。
那么临界的安全车距计算公式为:
第三种形式:当前车前面有障碍物或者发生紧急情况,前车驾驶员还没有时间进行制动,前车速度V0驶向障碍物,相撞之后,前车的速度变为0。当后车发现前车发生碰撞后,后车开始制动。
前车的制动距离SQ就为变为0,那么当后车发现前车发生事故后,进行反应和制动,那么后车制动行驶的距离SF为公式(2)计算所得。
那么临界的安全车距计算公式为:

通过上面的分析,由于后车驾驶员很难预料前车面临的状态,如果以第一种正常减速为条件所得的SV作为临界行车安全车距,当前车发生交通事故时,或当跟随车驾驶人由于注意力不集中时,前车已经停车,反而容易导致追尾碰撞事故。所以根据临界行车安全距离的定义,笔者认为应该选取前车的第三种减速形式作为临界安全车距的条件,则临界安全车距计算公式为公式(7)。
3 计算实例
根据中国当前高速公路的实际情况,汽车行驶的速度为60~120 km/h,即16.7m/s≤V0≤33.3 m/s;考虑到安全问题,两车停止时需保持的距离S0≥3m[7],本文取S0为3m。
考虑基准条件下(正常情况),即跟随车和引导车的制动强度大致相等,而车辆制动减速度按照路面附着系数的平均值来取。干燥路面取为6m/s2,潮湿路面取为5m/s2,积雪路面取为2.85 m/s2[8],所以本文取干燥路面的ja1=ja2=6 m/s2,并且在第二种减速形式中,假设进行计算。
在传统的临界安全车距的计算中,t1的取值为制动感觉反应时间的平均值[9]。根据临界安全车距的安全条件,就必须考虑驾驶员的感觉反应时间的分布。
统计分析表明:经验的制动感觉—反应时间概率不是正态分布,其对数呈逼近的正态分布,图1为感觉反应时间的对数正态分布。
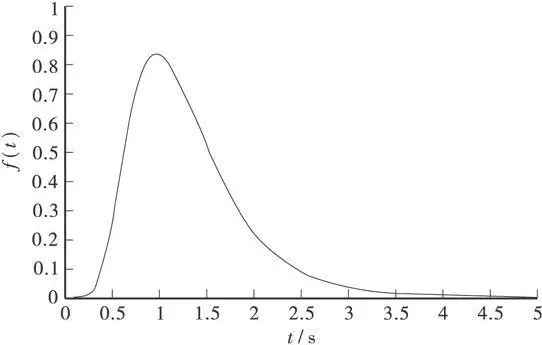
图1 驾驶员的制动感觉—反应时间分布
Lerner[10]等人对制动感觉反应时间作了进一步研究,通过对数正态分布将这些数据转化,得到表1的数据。

表1 制动感觉—反应时间t1 s
选取概率为5%到概率95%对应的制动感觉反应时间之内的值进行计算(t′1取0.2 s[11]),即取0.77 s≤t≤2.65 s。
计算结果见图2、图3。其中图2是根据传统跟随车的临界安全车距的公式(4)计算的结果。图3是考虑前车不同的减速状态的跟随车临界安全车距计算的结果,图3中的1是公式(7)计算的结果;2是公式(6)计算的结果;3是公式(4)计算的结果。
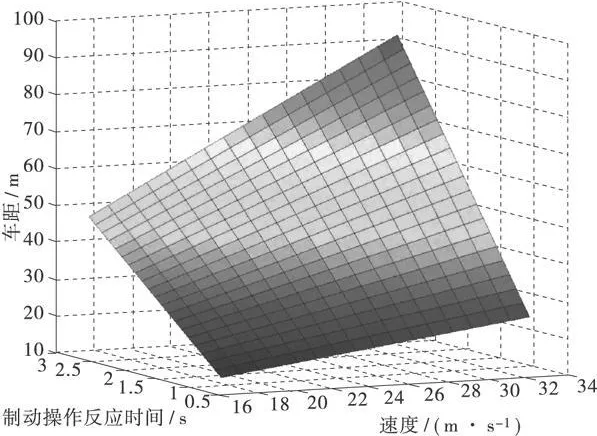
图2 传统公式计算的跟随车临界安全车距
从图3可知,前车的减速状况对跟随车安全车距影响很大,并且随着速度的增大,前车没有制动减速这一过程的临界安全车距与前车正常制动减速的临界安全车距的差值也越大,那么在高速的情况下,传统的跟随车安全车距很难保证安全。所以在车速比较高的路段,特别是在高速公路上,更应该考虑前车的减速状况,确保行车安全。在实际情况中,由于视距、道路线形、驾驶员、车辆等原因,前车发生碰撞,没有进行正常制动减速,如果后车以前车正常制动减速所得的临界安全车距进行跟随,由于车间距离过小,很可能与前车相撞,从而引发连环追尾的特大交通事故。同时从图2、图3还可以看出,驾驶员制动操作反应时间的差异对临界安全车距影响也非常大,选取合适的制动操作反应时间指导安全行车是至关重要的,根据临界安全行车车距的安全需要和统计学原理,取概率为95%对应的制动感觉反应时间是合理的。综上所述,在干燥的路面上,取概率为95%对应的制动感觉反应时间和前车没有制动减速的一个过程为条件计算所得的临界安全车距是能够很好地指导驾驶员安全行车。
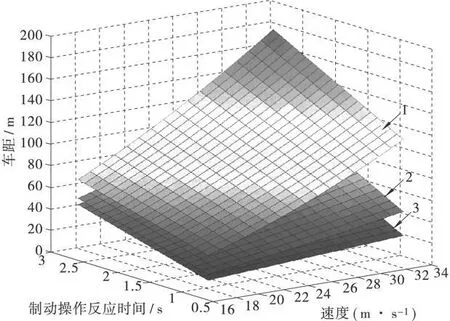
图3 考虑前车不同减速状况的跟随车临界安全车距
4 结论
临界安全车距对于指导驾驶员安全行车和预防高速公路汽车追尾具有重要的意义,前车的减速状态对临界安全车距影响是随着速度的增大而增大,所以在车速比较高的时候,考虑前车减速状态和驾驶员的不同反应时间的临界行车安全车距能够更好地保证行车安全,同时对于预防连环追尾的特大交通事故也具有十分积极的作用。
[1]马 骏.高速公路行车安全距离的分析与研究[J].西安公路交通大学学报,1998,18(4):90-94.
[2]钟 勇,姚剑峰.行进中车辆临界安全车距的探讨[J].湖南大学学报,2001,28(6):54-59.
[3]徐 杰,杜 文,孙 宏.跟随车安全距离的分析[J].交通运输工程学报,2002,2(1):100-104.
[4]郑安文,张炳焕.高速公路不同跟车状态下安全行车间距分析[J].武汉科技大学学报,2003,26(1):54-57.
[5]徐吉谦.交通工程总论[M].北京:人民交通出版社,2002.
[6]Kiyoshi Minami,yasuma,Shigeru Okabayashiet al.A Collision Avoidance warning System Using Laser Radar[J].SAE transaction section 5-joural of Aerospace,1998,97:830-836.
[7]Walter UL Ke,Roll Adomat,Karlheinz Butscher and Wolfgang lauer.Radar Based Automotive Obstacle Detection System[J].SAE transactions section 6-journal of passenger cars,1994,103:1224-1236.
[8]唐文杰.汽车安全车距的安全度评定系统研究[J].现代制造工程,2005(11):50-52.
[9]唐琤琤.限速、车速与安全[J].公路交通科技,2005(3).
[10]胡 红,刘小明,杨孝宽.基于最小安全间距的应急交通疏散车辆跟驰模型[J].北京工业大学,2007(10).
[11]丁建友,李铁柱,李文权.高速公路安全行车间距与追尾事故预防[A].2007第三届中国智能交通年会论文集[C].2007.
