辨识航行体水动力参数的智能方法
2011-02-27陈玮琪王宝寿
陈玮琪,颜 开,王宝寿
(中国船舶科学研究中心,江苏 无锡 214082)
1 引 言
水动力参数是设计水下航行体,如鱼雷、水下机器人等的原始数据,流体动力计算、风洞和水池试验是获取这些数据的常用手段,但由于实航环境的复杂性,这些手段获得的水动力参数与实航的水动力参数还是有较大的差别。因此应用辨识技术[1]从水下航行体的航行试验数据中提取它的流体动力参数具有重大的实际意义。
蔡金狮在文献[1]中总结了鱼雷水动力参数辨识的极大似然法;丁文镜利用极大似然法[2]和预报误差法[3]研究了受控航行体水动参数的辨识;刘建成探讨了极大似然法及其松弛算法在水下机器人水动参数的辨识中的应用[5];傅慧萍比较了牛顿-拉夫逊算法、单纯形法及模拟退火算法在水下运载器的水动力参数辨识中的优缺点[4],研究表明,牛顿-拉夫逊算法、单纯形法对初值要求较高,难以获得全局优化解,而模拟退火算法则有相对较好的全局收敛性,模拟退火算法本身是智能优化算法的一种。陈玮琪则将现代人工智能优化算法-群体智能优化算法PSO应用在水下航行体[6]的水动力参数辨识中,对物体出水过程[7-8]的水动力参数也进行过探索。这些研究表明,现代辨识技术通过引入最佳拟合准则将辨识问题转化为确定性函数的优化问题后,采用现代智能优化算法[9-11]来辨识是一个发展趋势。现代智能优化算法相对于经典的牛顿-拉夫逊算法具有很多优点,适合高维、多峰、连续性或可微性不好的非线性函数的全局优化,并且与函数的形式无关,因此,利用智能算法结合最小二乘准则就能获得较好的结果。
本文将文献[11]中发展出来的智能优化算法-微分群体算法(Different Swarm,简称DS)结合广泛使用的最小二乘准则用于水下航行体纵向平面运动的水动力参数辨识,仿真辨识表明,结果要好于文献[1]和文献[3]中给出的经典结果,而且以往算法所无法辨识的附加质量也能同时辨识出来。
2 水下航行体的运动状态方程
2.1 符号定义
ρ—水密度;
v—航行体运动速度;
L—航行体特征长度;
D—航行体直径;
m—航行体质量;
Jx,Jy,Jz—航行体转动惯量;
ωx,ωy,ωz—体坐标系下的角速度分量;
θ,ψ,γ—大地坐标系下的俯仰角、偏航角和滚动角;
vx,vy,vz—体坐标系下的速度;
x0,y0,z0—大地坐标系下的质心坐标。
2.2 平面弹道方程
在纵向运动中,令所有横向运动参数 vz,ωx,ωy,ψ,φ,z0,β 为 0。 并假设浮心总在导弹的纵轴上,浮心位置 (xB,yB,zB)=(xB,0,0 ),以航行体的重心为原点建立航行体体坐标系,则体坐标系下的纵向动力学方程:
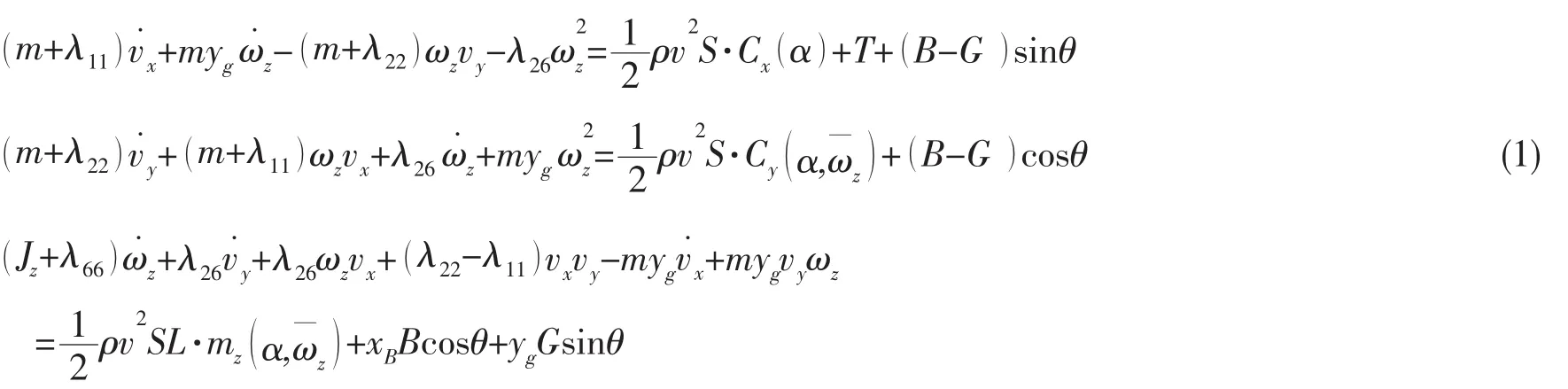
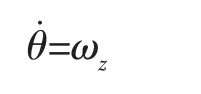
纵向运动学方程:

3 水动力模型
(1)式给出了与水动力相关的量。 根据流体力学理论,附加质量λ11,λ22,λ26,λ66在水下是常数,而与粘性作用力相关的水动力可以近似展开为水动力系数的一阶线形模型:

待辨识的水动力参数共12个:

这里仅考虑全湿流状态,忽略空泡的影响。
4 辨识原理和算法
辨识12个参数的算法是,从12个水动力参数的初始值出发,根据方程(1)计算航行体的弹道,然后比较计算弹道与试验弹道之间的误差,再根据误差按一定方法逐步调整12个参数的值,最终使得计算弹道与试验弹道之间的误差达到最小,这时得到的12个参数值就是需要求解的水动力参数值。定义系统的状态向量为

待辨识的未知水动力参数向量为

则方程(1)可以整理为标准形式

辨识准则采用最小二乘法,即求ξ,使得计算弹道xi与试验弹道之间的误差平方和达到最小

文献[11]中所提出的DS智能优化算法[11]具有非常强大的约束优化能力,因此可以用于本问题。在DS中,每一个解称为一个粒子,粒子在解空间中的位置就表示一个可能解,解的变化对应于粒子的飞行。初始时解空间中包含一个粒子群体,群体中每个粒子在解空间中飞行并相互交换信息,然后每个粒子根据获得的信息确定下一步的飞行位置,直至找到最优解。DS中,粒子交换信息并改变位置的公式如下

这里,n表示粒子群体的个数,下标i表示的是第i个粒子,上标k表示第k步的飞行位置表示第i个粒子前k步所到达过的最好位置,表示整个粒子群在前k步所达到的最好位置,rk是[0 1]之间的随机数,ω是算法参数,一般取为1,和表示粒子群中随机选取的两个粒子i1,i2的最好位置。经过一定的迭代步数就是J的最优解。
5 模拟辨识
为检验辨识算法的可行性,采用模拟弹道进行仿真辨识,方法如下,先选取已知的水动力参数,再根据方程(5),利用 Runge-Kutta(4,5)方法求解状态方程(1),得到弹道运动状态参数然后叠加上伪随机数发生器产生的观测噪声ε,

以模拟试验观测数据。最后根据模拟试验观测数据来辨识水动力参数,并和选取的已知水动力参数值进行比较。
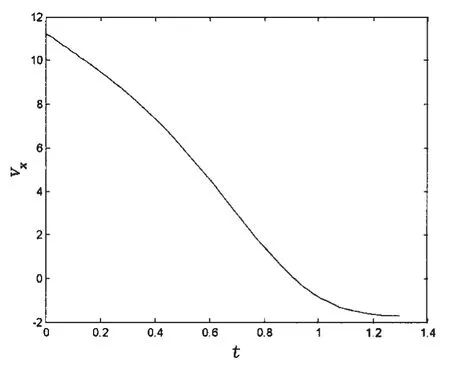
图1 积分弹道曲线vxFig.1 The integral trajectory curve for vx
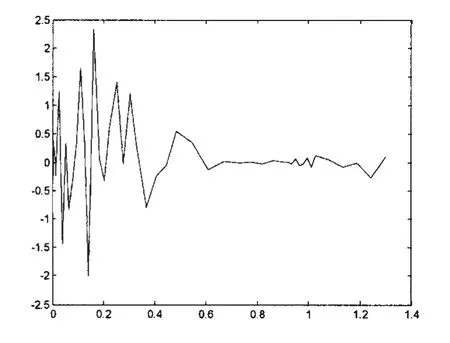
图2 观测噪声Fig.2 The observed noise
模拟弹道的已知值见表1,初始值根据试验数据的某一时间选取。图1显示了根据水动力参数已知值积分出来的模拟弹道曲线vx,图2是伪随机数发生器产生的观测噪声,图3是弹道曲线vx叠加观测噪声得到的模拟观测数据。
表1中列出了观测噪声水平分别为标准差0、1%、3%峰值下,辨识的水动力参数与已知精确值的比较(通常λ11非常小,这里不参与辨识)。
从模拟弹道的辨识结果来看,首先,算法在不同噪声水平下,得到的辨识结果都和已知值吻合得相当好,最大相对误差不超过7%,这说明了本文的算法是可行的,也是可靠的;从中还可以看出,观测噪声对结果的影响不大,这说明该算法具有很好的鲁棒性;同时,该算法可以同时辨识出附加质量和其它水动力参数,而文献[1]中基于极大似然法所提出的鱼雷辨识算法则认为附加质量是不可以辨识的量,因此文中的算法更有优越性。另外,算法对初值几乎没有要求,可以从任意值开始进行搜索,而且速度极快,这是牛顿-拉夫逊算法所不具备的优势。
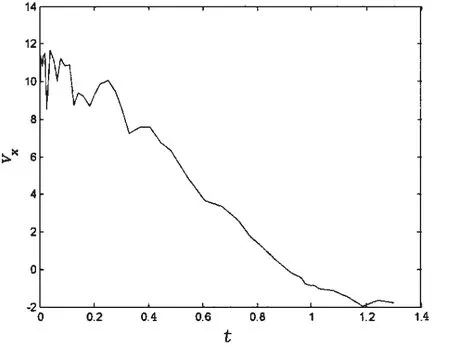
图3 模拟观测弹道Fig.3 The simulating trajectory
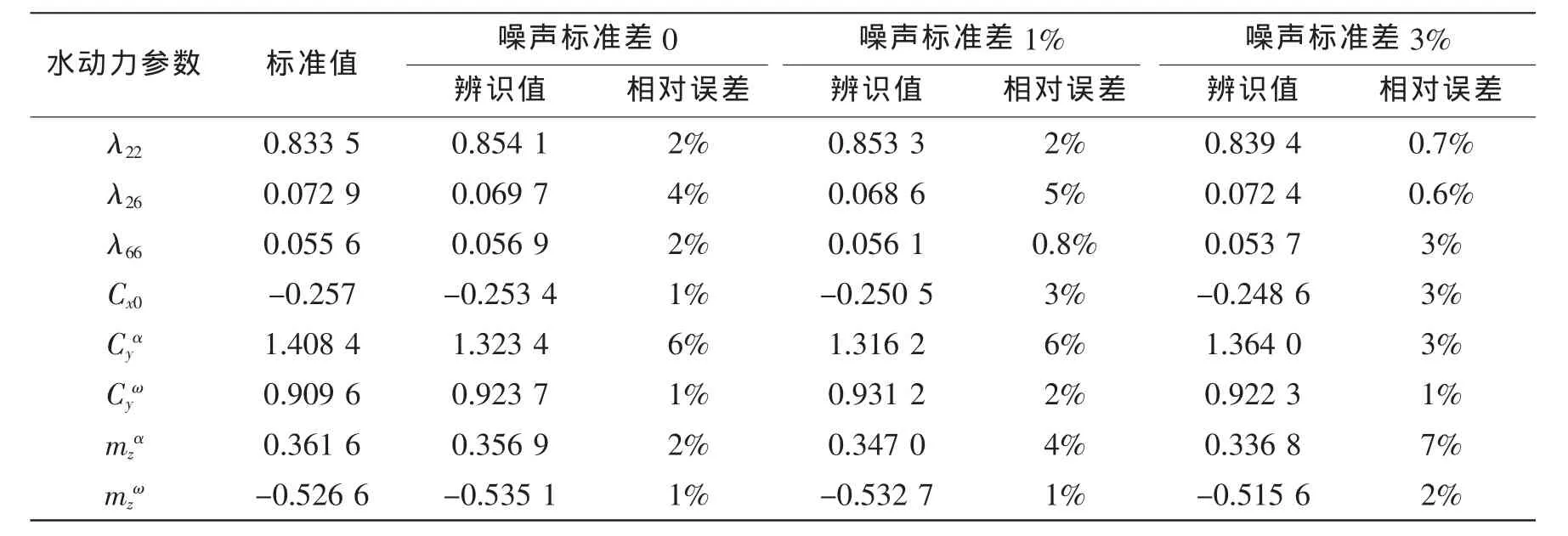
表1 仿真辨识结果比较Tab.1 Comparison between the identification simulating results
6 结 论
(1)和经典的牛顿—拉夫逊算法比较起来,智能辨识算法要简单得多,因为智能算法过程无须考虑运动方程的复杂的数学形式,而且对初值要求不高,甚至几乎没有要求,这是经典辨识算法所不具备的优点,因此适合工程应用。
(2)此次研究虽然采用了平面弹道,但是由于辨识算法是通用的,因此换成6自由度全弹道方程来进行辨识是很容易做到的,而且算法对待辨识参数的维数不敏感。
(3)以后的工作将考虑空泡,并在水动力模型中增加空泡与水动力之间的模型,利用类似的辨识技术最终获得带空泡航行体的水动力参数及其模型。
[1]蔡金狮等.飞行器系统辨识学[M].北京:国防工业出版社,2003.
[2]丁文镜,罗仁凡等.受控航行体水动参数的极大似然辨识[J].清华大学学报(自然科学版),1992,2(32):89-95.
[3]丁文镜,罗仁凡等.辨识航行器水动力参数的预报误差法[C].鱼雷控制系统学组学术交流会,1991.
[4]傅慧萍.潜射导弹运载器水弹道动力学系统建模理论与应用[D].西安:西北工业大学,2000.
[5]刘建成,刘学敏,徐玉如.极大似然法在水下机器人系统辨识中的应用[J].哈尔滨工程大学学报,2001,22(5):1-4.
[6]陈玮琪,颜 开,史淦君,王士同,刘志勇.水下航行体水动力系数的智能辨识方法研究[J].船舶力学,2007,11(1):40-46.
[7]陈玮琪,颜 开,史淦君,王士同.基于TSK智能技术的物体垂直出水水动力系数辨识研究[J].水动力学研究与进展,2005,20(4):445-451.
[8]陈玮琪,颜 开.新的智能算法和物体斜出水水动力系数辨识[J].船舶力学,2008,12(2):204-210.
[9]Lu Haiyan,Chen Weiqi.Self-adaptive velocity particle swarm optimization for solving constrained optimization problems[J].Journal of Global Optimization,2008,41:427-445.
[10]Lu Haiyan,Chen Weiqi.Dynamic-objective particle swarm optimization for constrained optimization problems[J].J Comb.Optim.,2006,12(4):409-419.
[11]陈玮琪.智能辨识技术及其在物体出水水动力参数辨识中的应用研究[D].无锡:江南大学,2008.