三自由度绳驱动并联机器人运动学分析
2011-02-19乔文刚盛如龙
乔文刚,盛如龙,乔 魏
QIAO Wen-gang,SHENG Ru-long,QIAO Wei
(内蒙古科技大学 机械工程学院,包头 014010)
0 引言
自1987年Hunt提出并联机器人结构模型以来,并联机器人的研究受到广泛的关注,并取得了一定的成果。与串联机器人相比并联机器人的工作空间较小;并联机构的灵活性较差,且在工作空间内部存在着奇异点;其控制系统非常复杂,致使研究难度、生产成本等相应增加。并联机器人由于其运动速度高、动态响应快、定位准确性好等优点,在某些领域作为串联机器人强有力的补充,所以应用潜力非常大,广泛应用于装配、包装、点焊等领域。近年来,少自由度并联机构在工业一线应用成为机器人技术研究的新领域。与六自由度Stewart平台相比,少自由度机构具有结构简单,造价低等特点,因此在工业生产及其它领域具有广阔的应用前景。
本文提出一种三自由度绳驱动并联机器人,其驱动器可以直接安装在底座上,不需杆作支撑,因此结构简单、实用性强、惯性小、具有重调整和可移动性强、完全分离的传动优点。
1 绳驱动并联机器人组成及工作原理
1.1 机构组成及特点
绳驱动并联机器人(如图1所示)是一种特殊的并联机器人,由Stewar平台发展而来。应为Stewar 平台考虑腿部的质量影响,使得计算量和控制都非常复杂,而且不宜实现高速运动。绳作为柔性物质,只具有单向力,即只能承受拉力,这是绳驱动并联机器人需要解决的问题,即要使
机器人在其工作空间内绳处处长紧。
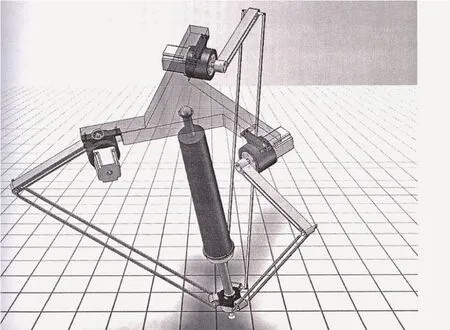
图1 三自由度绳驱动并联机器人
绳驱动并联机器人有许多优点,包括:
1)大个子空间:一个绞盘可以提供很大的范围的可变绳长。这样的便利是其他机器人所不具备的。
2)低惯性:材料提供最高的力/质量比。当它们处于张紧状态时,绳子只能紧,最大化了材料的力,因此,减小了控制器的质量和惯性。
3)结构简单:绳简化了控制器的机构,绳的柔性简化了关节的连接及润滑。
4)重调整和可移动性:绞盘可以简单的拆卸来重调整,并且可以改变绳驱动控制器的工作空间。
5)完全分离的传动:用全绳驱动控制器,所有的传动和敏感部分可以放在离终端执行器和工作地带很远的地方。可适应危险的工作环境。
1.2 动作原理
三自由度绳驱动并联机器人共计九个关节,包括三个转动关节(即电机与摆杆的连接)和有六个球面副关节(即绳与摆杆机、动平台的连接和气缸与上下平台的连接)。由于气缸的两端分别安装在两平台的几何中心,所以起辅助支撑作用不参与机构主要运动。该机构的动力源来自安装在基座上的伺服电机,每个电机驱动一组摆杆和绳,绳的另一端与动平台相连。通过伺服电机输出的一定的转角带动摆杆使其摆动带动绳,从而使动平台实现预期的运动。由于绳只能承受张力所以在上下平台之间安装一气缸来使绳时刻处于张紧状态,同时利用气缸来作一支撑,使机构具有一定的刚度。
2 运动学分析
2.1 坐标系建立
1)XYZ:固联于基座的质心O点,并且处于三个驱动器轴垂分线的交点。
2)XiYiZi:固联于第i个驱动器上,其中Xi垂直于转轴i并且通过基座质心点O。Yi沿着转轴i,Zi根据右手笛卡尔坐标系确定。
如图2所示,三自由度绳驱动并联机器人坐标系的建立。
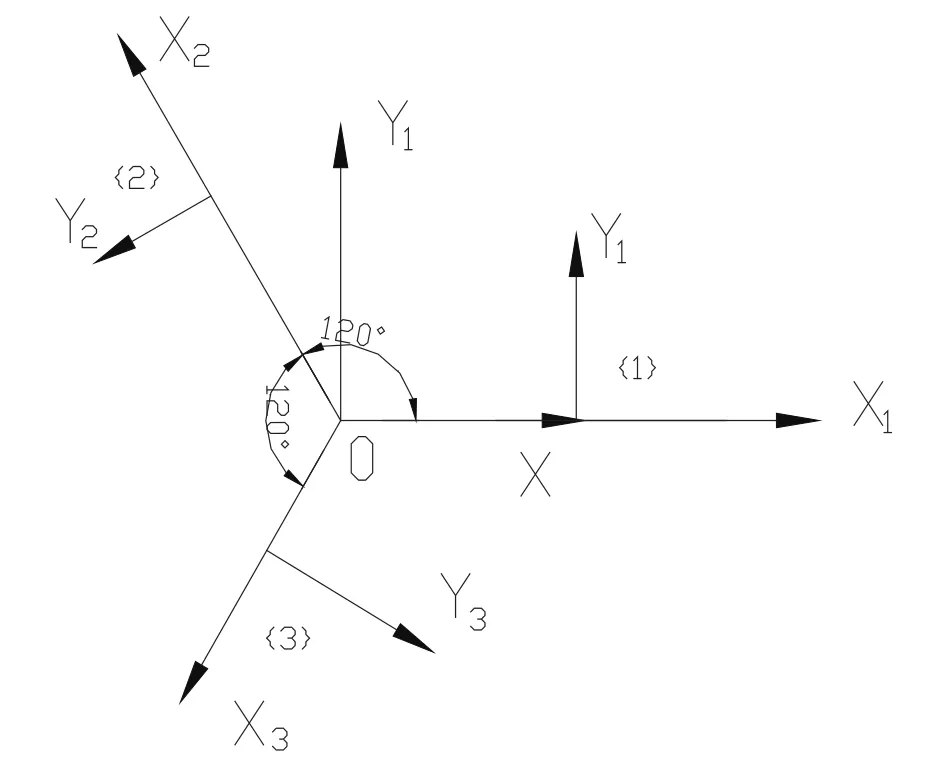
图2 三自由度绳驱动并联机器人坐标系
2.2 变量和向量
1)P:移动平台的质心
3)Ai:第i轴在XiZi平面投影
4)Bi:摆杆末端在XiZi平面投影
5)Ci:移动平台末端在XiZi平面的投影
6)ϕi:X与Xi的夹角
7)θ1i: Xi与的夹角
8)θ2i:绳与Xi的夹角
9)θ3i:绳与Yi的夹角
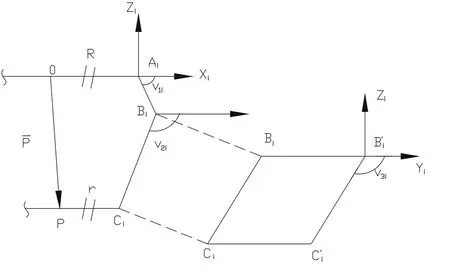
图3 三自由度绳驱动并联机器人第[i]坐标系
2.3 逆向运动学分析
逆向运动学是用来解决移动平台在笛卡尔坐标系已知的情况下来求解三组驱动器的角度。在计算中移动平台的位置由 给出。逆向运动学通过计算得到三个关节空间的变量θ1i、θ2i和θ3i,这样就可以确定机器人的可能的形位。
同样

因此对于给定的移动平台的位置参数,可以得到4组解。
2.4 前向运动学分析
前向运动学主要用来解决对于已知关节空间角度输入相对应的移动平台的笛卡尔坐标,对于这个机器人来说,已知关节输入是绳长对应的移动平台输出是P在XYZ坐标系下的坐标值。
给定θ1i为已知,可以导出9个未知数的9组方程,即:
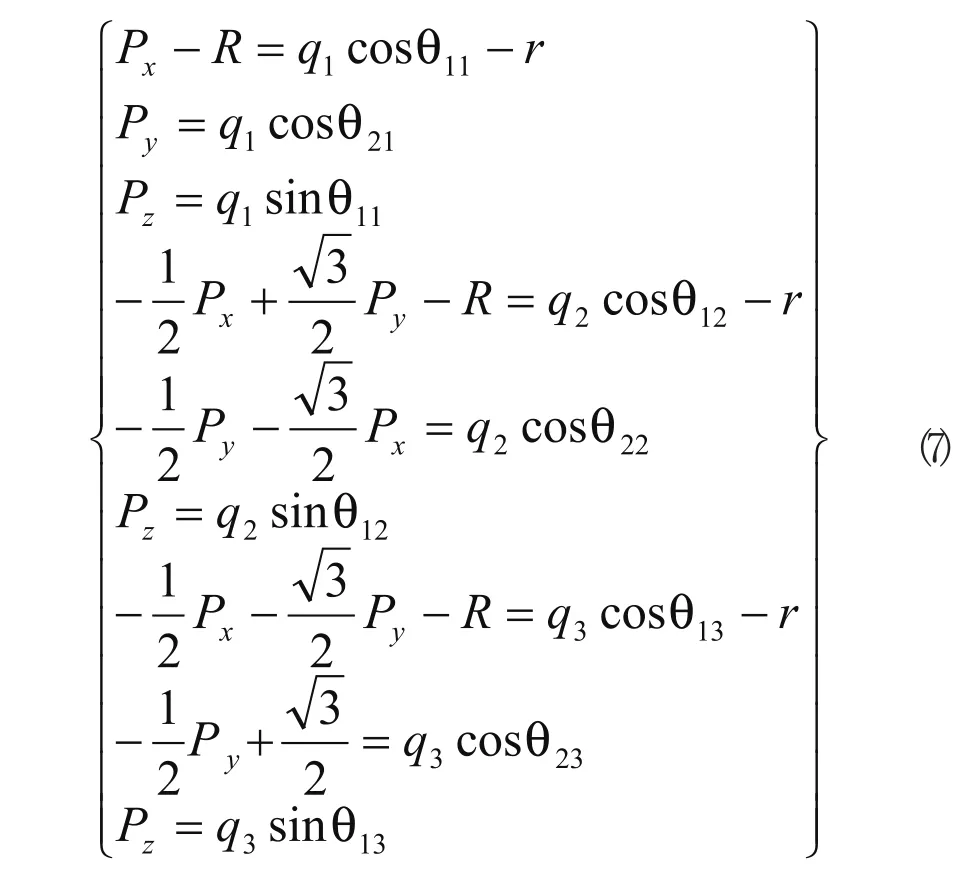
通过消元法可以得到只含有pxpypz的三个方程,即:


其中:

2.5 数值分析
由设计模型可知:R=300mm,r=80mm,l=468mm,L=277mm。利用MATLAB软件进行计算,角度输入值如表1所示。

表1 角度输入
在求正解过程当中,计算的结果(位置输出)为x、y、z,其由两组解构成,则动平台有八种可能的位置,通过模型及机构坐标系进行分析,采用排除法得到动平台正确的位置输出,如表2 所示。

表2 动平台位置输出
经过MATLAB的计算可知,正解与反解的结果是一一对应,故关于位置正解与位置反解推导过程是正确的。
3 结束语
本文在阐述三自由度绳驱动并联机器人结构特点的基础上,对其运动学进行了分析,得出了该机器人运动学正反解方程,为该机器人进一步的研究奠定了基础。从运动学方程显而意见,该机构具有正反运动学计算相对简单、易得出显示表达式、易于实现实时控制的特点,为以后该类机器人的应用推广提供了可靠的理论依据。
[1]张春林,余跃庆,高等机构学[M].北京:北京理工大学,2005.
[2]马香风.机器人机构学[M].北京:机械工业出版社,1991.
[3]宗光华.程君实,等.机器人技术手册.北京:科学出版社,2007.
[4]刘雄伟,郑亚青.6自由度绳牵引并联机构的运动学分析[J].机械工程学报,2002,(38):16-20.
[5]黄真.空间机构学[M].北京:机械工业出版社,1991.
[6]熊有伦.机器人学[M].北京:机械工业出版社,1996.
[7]梁崇高,荣辉.一种Stewart平台型机械手位移正解[J].机械工程学报,1991,27(2):26-30.
[8]赵杰,朱延河,蔡鹤皋.Delta型并联机器人运动学正解几何解法[J].哈尔滨工业大学学报,2003,35(l):25-27.
