基于模糊自适应PID的温度控制系统
2011-01-10王晓员
王晓员
(合肥学院基础实验与实践教学中心,安徽合肥 230022)
0 引 言
在电气系统控制的发展中,PID控制在电气系统控制中占据重要的地位.但传统PID控制参数一经确定后,无法随着对象的变化而调整,而在实际电气控制中,会出现时变的、非线性、易受到随机干扰的情况,为了使系统具有很好的动态性能,希望参数能依据当前系统的状况来做出相应的调整.模糊控制是以模糊语言集、模糊变量和模糊推理为基础的新型智能控制算法,其特点是无需知道被控系统的数学模型,控制性能鲁棒性强[1,2].目前,PLC的功能指令越来越强大,依据模拟量的输入输出模块就能够实现许多复杂的控制算法.将模糊控制理论与PLC相结合,对无法建立精确数学模型的、复杂的非线性控制系统,有较好的控制效果[3-5].本文将模糊控制理论与PID控制算法相结合,设计了一种基于PLC的模糊自适应PID温度控制系统,在实际应用测试中,取得了良好的控制效果.
1 模糊自适应PID控制器设计
1.1 模糊自适应PID控制系统结构
模糊自适应PID温度控制系统结构如图1所示.
由图1可见,控制系统由模糊控制器与PID控制器2部分组成.模糊控制器是由SFC1、SFC2、SFC3子模糊控制器构成的复合模糊控制器.模糊推理系统利用系统的误差和误差变化率作为输入,依据设计好的模糊推理规则来进行模糊推理运算,分别控制PID控制器的参数,Kp、Ki、Kd,使系统达到较好的动态、静态性能.本控制系统的子模糊控制器的输出为:
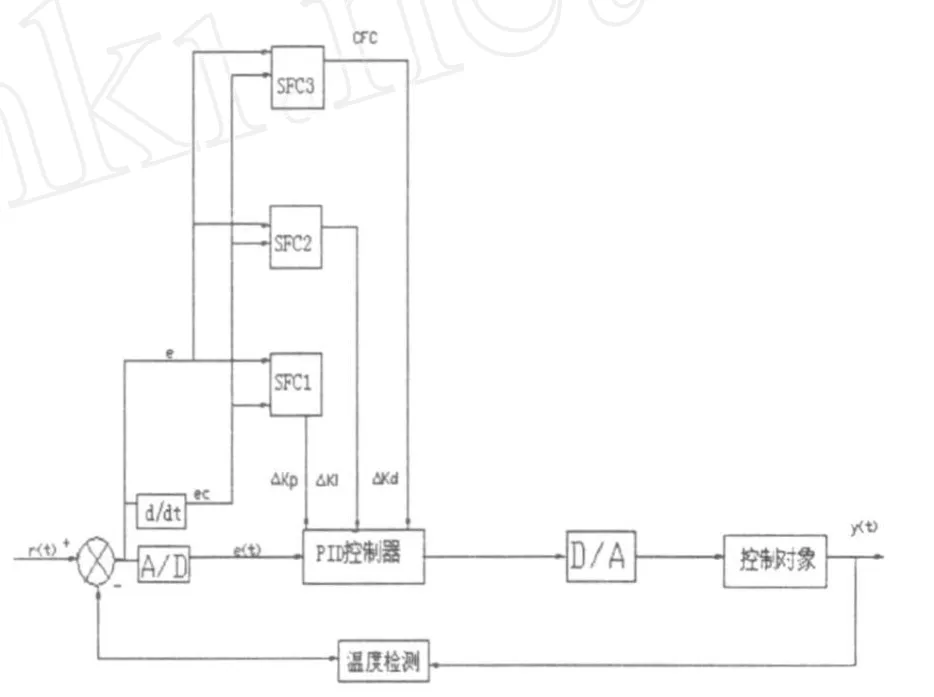
图1 模糊自适应PID温度控制系统结构示意图
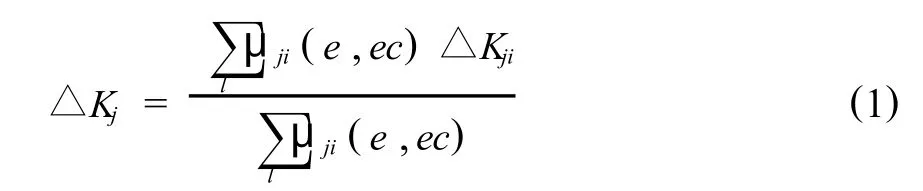
式中,△Kj分别代表 △Kp、△Ki、△Kd.
模糊控制器的输出 △Kp、△Ki、△Kd分别经过修正系数修正后,和常规PID控制器的 Kp′、Ki′、Kd′分别相加,相加之和作为PID控制器的实际参数.
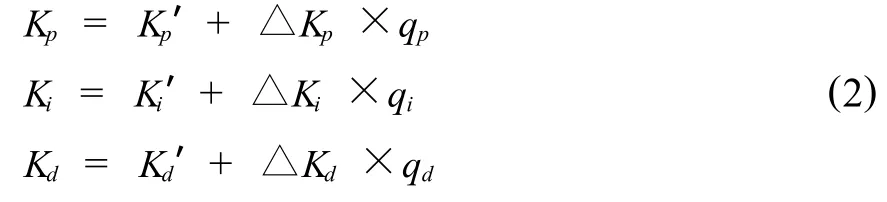
式中,qp、qi、qd分别为 △Kp、△Ki和 △Kd的修正系数.Kp、Ki、Kd是PID控制器的实际控制参数.
1.2 PID参数调整规则
数字PID控制算法为,

通常,模糊规则的建立依赖于操作者的经验与技术专家的技术知识.依据 Kp、Ki、Kd对系统输出的影响,得出 Kp、Ki、Kd的调整规则如下:
(1)当|e|较大时,可加快系统的响应速度,取较大的 Kp,较小的 Kd,为防止积分饱和,去掉积分,取Ki=0.
(2)当|e|、|ec|的值处于中间时,为防止系统产生过大的超调量,可取较小的 Ki值,适中的Kp、Ki,以保证系统的响应速度.
(3)当|e|较小时,适当选取 Kd值.如果|ec|较小,Kd可取大些;如果|ec|较大时,Kd可取小些,以保证系统响应具有良好的稳态性.
同时,依据PID参数的作用,在不同的偏差和偏差变化率时,对 PID参数的要求,可制定相应的△Kp、△Ki、△Kd模糊控制规则.
1.3 论域和隶属度函数
本控制系统利用采样得到的温度信号和给定值相比较,得系统的误差和误差变化率,再通过量化,得到系统的输入变量e和ec,输出变量 △Kp、△Ki、△Kd.隶属函数是论域元素对于变量从属程度的描述,根据控制对象的具体情况,本文选用三角型隶属函数,输入变量e和ec,输出 △Kp、△Ki、△Kd均采用三角型隶属函数.
误差 e和误差变化率ec的模糊子集为,{PB、PM、PS、ZO、NS、NM、NB},其对应的论域为,{3、2、1、0、-1、-2、-3}.
输出变量 △Kp、△Ki、△Kd的模糊子集为, {PB、PMB、PM、PMS、PS、ZO、NS、NMS、NM、NMB、NB},其对应的模糊论域为,{1、0.8、0.6、0.4、0.2、0、-0.2、-0.4、-0.6、-0.8、-1}.
1.4 建立模糊控制表
由于模糊推理过程必须进行复杂的矩阵运算,计算量很大,在线实施推理很难满足控制系统实时性的要求,据此本文采用查表法来进行模糊推理运算,依据制定的模糊控制规则也就是推理语句,求出控制量,并以此来制定模糊控制表.
根据图1,控制系统的推理语句形式可表示为,
If e is Ai、and ec is Bithen△Kjis Ci
其中,Ai、Bi、Ci分别是e、ec和输出量 △Kj(j=p、i、d)的模糊子集,其合成关系是,

对于特定的输入量A*i、B*i,通过式(4)可以计算得到对应的输出量 C*i.将求得的模糊控制输出量 C*i求并,可得到模糊输出 C*,

模糊控制输出 C*是模糊量,运用反模糊加权平均法求得输出控制量 △Kj的精确值,并且经Matlab仿真加以修正,最后获得如表1所示模糊控制表.
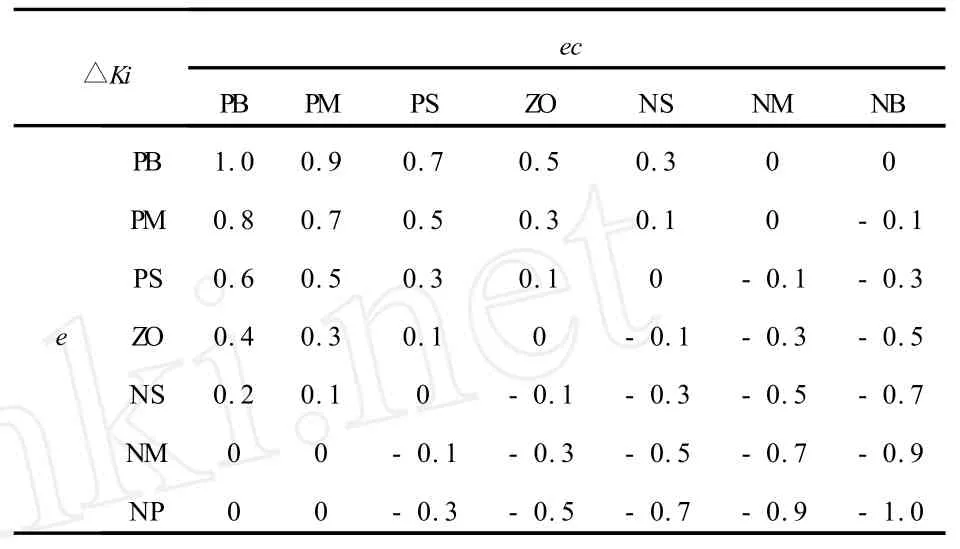
表1 模糊控制表
2 模糊自适应PID温度控制系统
2.1 温度控制系统组成
本文设计的模糊自适应PID温度控制系统由PLC、输入/输出模块、EM235模块、接触器等组成. PLC采用西门子S7-200系列CPU224.依据不同的输入指令,PLC进行各数字量的逻辑控制、模拟量的处理、数据运算,通过变频器控制电机控制泵的速度,从而使系统温度稳定在设定值范围中.温度控制系统结构如图2所示.
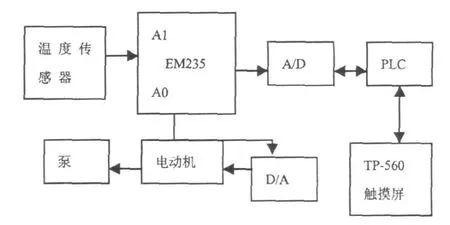
图2 温度控制系统结构图
2.2 系统控制过程
系统控制过程的具体步骤为:
(1)系统的各项操作指令通过触摸屏及通讯电缆传送到PLC.PLC依据操作指令与预先设计好的程序进行相应的动作控制.
(2)PLD控制器的参数在触摸屏上设定.通过触摸屏来读取PLC相应存储器的数值,显示被控系统的数值与变化情况.
(3)通过EM235模块对模拟量的输入与输出转换.系统的温度经温度传感器检测并经过EM235模块转换后,利用电流传输,来减少干扰信号的影响.
(4)触摸屏和PLC间采用RS-485通讯方式,数据类型是8位数据位,1位停止位.
(5)PLC依据采集到的误差与误差变化率输入信号,通过限幅量化处理,所对应的模糊论域中的值,查询模糊控制表,求出 △Kp、△Ki、△Kd的值并加以修正,和 Kp′、Ki′、Kd′相加,得到PID调节器的控制参数 Kp、Ki、Kd,依据PID控制算法计算输出控制量.
2.3 结果与分析
本文设计的模糊自适应温度控制器应用在锅炉温度控制系统中后,结果如图3所示.
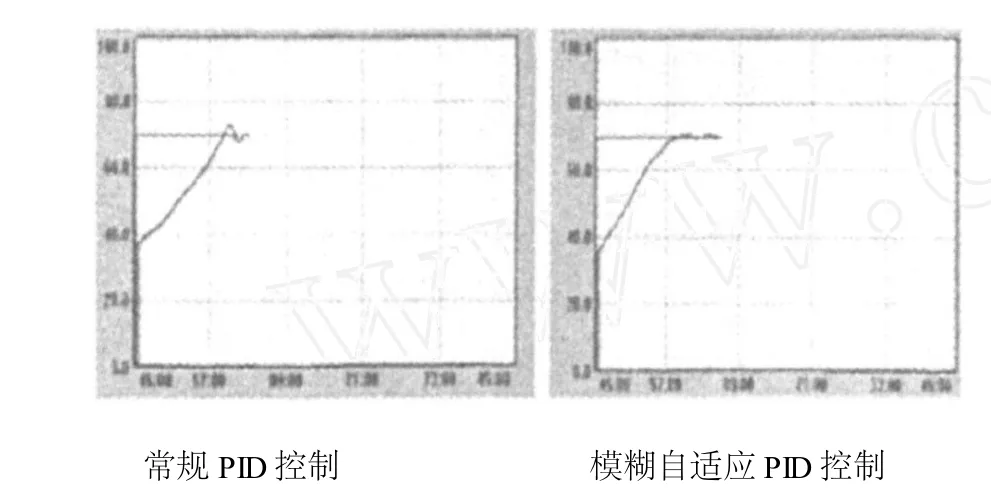
图3 锅炉温度实时曲线
由于锅炉温度为非线性变化,由图3可见,采用单一PID控制器控制时效果较差,与常规PID控制相比,模糊自适应PID控制波动度小、超调量小、稳定性好、过渡时间短,有较强的鲁棒性,其性能明显优于常规PID控制.
3 结 语
在PID控制与模糊控制技术的基础上,设计了基于模糊自适应PID的温度控制系统,系统具有很好的控制品质与较好的鲁棒性.实际应用表明,此温度控制系统方法简单、经济,具有一定的推广应用价值.
[1]谭伟,徐玲.智能温室温湿度控制系统设计及其仿真[J].东北林业大学学报,2008,36(8):88-89.
[2]谢书明,柴天佑.一种参数自适应模糊PID控制器[J].信息与控制,1998,27(4):255-259.
[3]李祖欣.Matlab在模糊控制系统设计和仿真的应用[J].系统仿真学报,2003,15(1):132-134.
[4]刘金琨.先进PID控制Matlab仿真[M].北京:电子工业出版社,2004.
[5]SIEMENS.SIMATIC S7-200可编程控制器系统手册[G].SIEMENS,2004.
[6]诸静.模糊控制原理与应用[M].北京:机械工业出版社, 2003.