基于空间矢量脉宽调制方法的自控式永磁同步电动机控制系统的数字化实现*
2010-11-21王礼鹏张化光侯利民刘秀翀韩杰
王礼鹏,张化光,侯利民,刘秀翀,韩杰
(东北大学信息与科学工程学院,辽宁沈阳 110004)
0 引言
面贴式永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、体积小、效率高、转矩/重量比高、转动惯量低、易于维护等特点,目前广泛应用于数控机床、机器人、航空航天等领域。近年来,随着永磁材料性能和电力电子器件性价比的不断提高,微机控制技术和电机制造工艺的迅猛发展,以PMSM为动力核心的驱动系统逐渐受到国内外的普遍关注。本文采用TI公司的电机控制专用芯片DSP2812,采用高性能的静态CMOS技术,主频达150 MHz,使得指令周期缩短为6.67 ns,提高了控制器的实时控制能力。
在文献[1-3]的理论基础上,通过数字信号处理器(Digital Siginal Processing,DSP)和硬件电路来完成空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)方法的数字化实现,并把该方法应用到PMSM的调速系统中。文献[4]采用旋转变压器来计算转子位置角,通过给定子注入已知大小和方向的直流电进行转子初始定位;文献[5]采用先进行转速开环控制然后过渡到转速闭环控制的方法。与文献[4]和文献[5]比较,该系统采用日本多摩川公司的增量式光电编码器进行转子初始定位和角度计算,其中U、V、W 信号进行转子初始角度估计,A、B、Z脉冲信号进行转子角度计算,从而实现转子磁场定向的矢量控制,可一次性完成速度闭环控制。
此外,与传统的增量式PID控制器不同的是:本文采用了对增量进行限幅的方法,使得起动电流很小,减少了起动时大电流对电机的冲击,延长了电机的使用寿命。
1 SVPWM原理及数字化实现
SVPWM算法的基本步骤如下:(1)判断空间矢量所在的扇区;(2)计算相邻两开关电压矢量作用的时间;(3)根据开关电压矢量作用时间合成三相PWM信号。
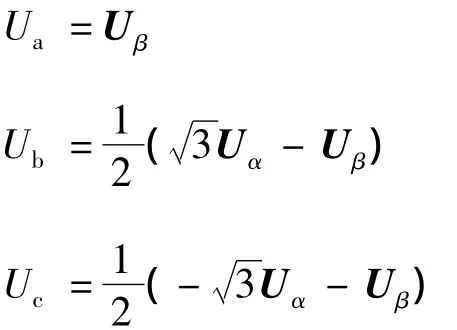
再定义三个变量A、B、C,如果Ua>0,则A=1,否则 A=0;如果 Ub>0,则 B=1,否则 B=0;如果Uc>0,则C=1,否则C=0,空间矢量所在扇区可表示为:N=4C+2B+A。基本矢量空间分布和切换状态如图1所示。
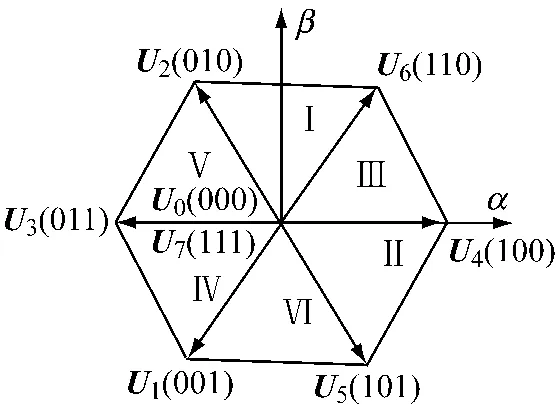
图1 基本矢量空间分布和切换状态

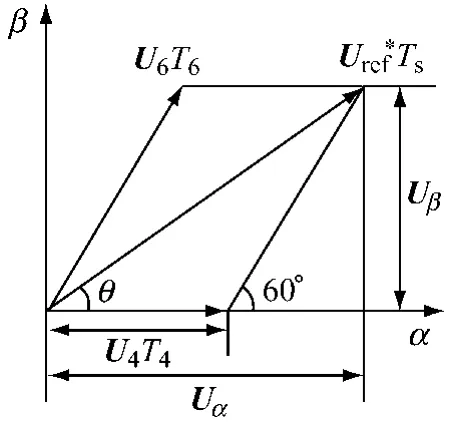
图2 参考电压的合成与分解

从式(2)可以求得:

如果定义:
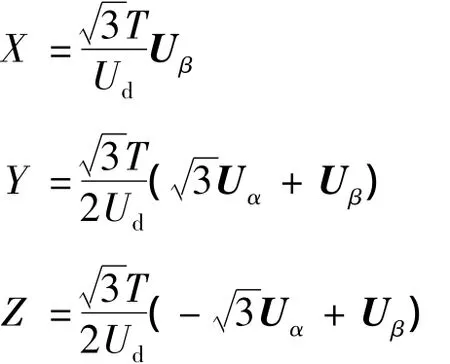
那么对于第Ⅲ扇区的两个空间矢量U4、U6的作用时间可以表示为T4=-Z,T6=X。同理,当在其他扇区时,相应的作用时间也可以用X,Y,Z表示,它们的对应关系如表1所示。

表1 T1和T2的赋值表
为了计算空间矢量比较器的切换点Tcm1、Tcm2、Tcm3,定义:

则扇区和比较器的切换点的关系如表2所示。
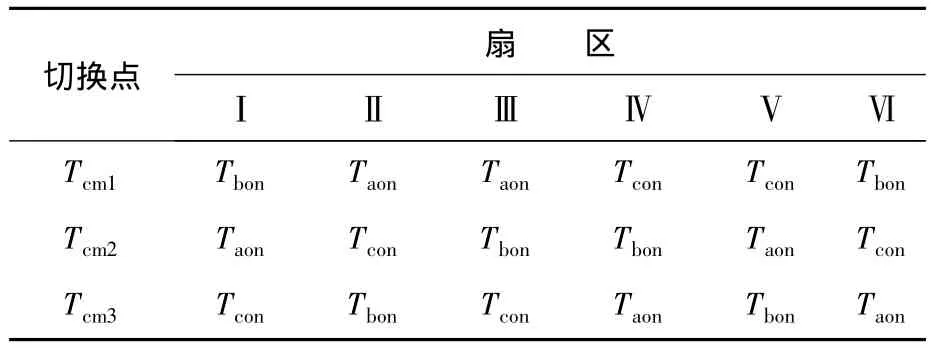
表2 切换点Tcm1,Tcm2,Tcm3的赋值表
在以上理论基础上,利用 TI公司的DSP2812,通过软件实现了SVPWM算法,通过阻容滤波,在PWM1引脚输出的波形如图3所示。

图3 SVPWM输出波形
从图3可以看出,SVPWM输出的波形是马鞍波,相当于在正弦波中叠加了三次谐波,可以有效提高直流母线的电压利用率,与传统的正弦脉宽调制(Sin-Wave Pulse Width Modulation,SPWM)相比,利用率提高了15.47%。
2 SVPWM方式在PMSM调速系统中的应用
PMSM的id=0控制实质是一种矢量解耦控制,可以实现转矩线性化控制。面贴式PMSM的Ld≈Lq,由PMSM的电磁转矩公式Te=pn[Ψfiq+(Ld-Lq)idiq]可以看出,采用id=0的控制方式能够实现由最小的电流得到最大的输出转矩。
2.1 控制系统硬件电路设计
控制系统的硬件电路主要包括相电流检测电路、光电码盘接收到的脉冲信号处理电路、功率驱动和保护电路等。
相电流检测电路如图4所示:放大电路采用的是MC33074芯片,它把霍尔元件检测和转换后的小电流信号经过采样电阻转换为电压信号,经阻容滤波和三级放大电路,最后得到DSP中A/D采样可以接收的0~3 V电压信号。
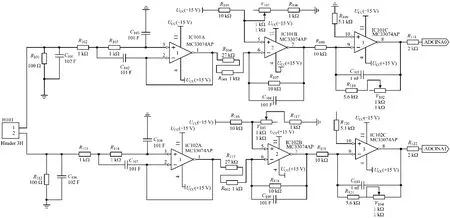
图4 相电流检测电路
光电编码器采用多摩川的增量式编码器,该编码器的分辨率为2 500脉冲/转,输出信号包括A、B、Z、U、V、W 脉冲,其中 A 和 B 信号互差 90°电角度,DSP通过判断 A和 B脉冲的相位和个数可以得到电机的转向和速度。U、V、W脉冲用于在电机起动时判断电机转子的位置,U、V、W信号每转变化 p×360°,电机转子360°空间被分成p等分,每一等分对应电信号一个周期。在每一个360°电角度空间,U、V、W信号按所对应的状态将该空间分成6份。U、V、W状态信号在一个周期内为 010、011、001、101、100、110,他们各对应电信号的60°区间。在电机初始上电时,由U、V、W状态可以判定电机转子所处空间位置的相应区间,初始定位角度误差为±30°。光电编码器的信号接收及处理电路如图5所示。差分信号驱动芯片AM26LS32可以减少工业现场中其他信号对脉冲信号的干扰,为准确计算转子角度提供了保障。
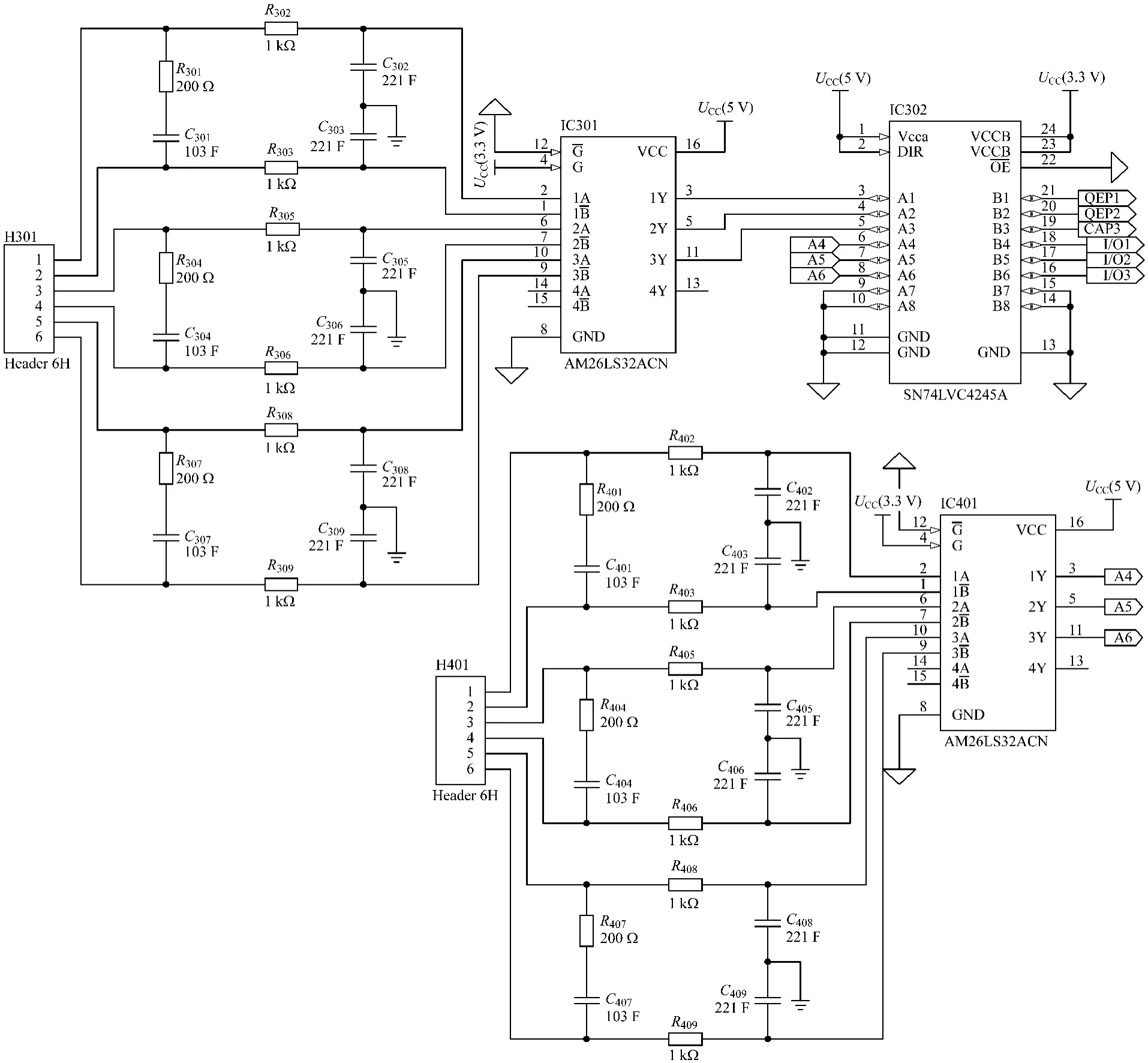
图5 光电编码器的信号接收电路
控制系统的功率驱动电路采用7个绝缘栅双极晶体管(IGBT),其中6个IGBT作为SVPWM信号的开关管,1个IGBT作为制动单元的开关管;IGBT的信号驱动电路采用西门康公司的驱动板,该驱动板带有故障保护、光电隔离等功能。当有过流、过压、欠压信号发生时,会输出一个低电平信号,该信号输入到DSP2812的PDPINTA引脚,触发故障中断,并在软件中进行故障处理(封锁驱动脉冲)。
2.2 控制系统软件设计
系统的软件分为主程序和中断服务程序。主程序内首先完成系统的初始化,以及DSP内各个控制模块寄存器的设置等,然后进入循环程序,等待中断的产生,程序框图如图6(a)所示。中断服务程序包括PDPINTA中断服务程序、PWM中断服务程序、Z脉冲中断服务程序及通信中断服务程序等。当有故障信号到来时,进入PDPINTA中断服务程序,封锁PWM驱动信号;在定时器T1下溢中断时调用PWM中断服务程序,中断频率为10 kHz,电流环的控制周期为0.000 1 s,速度环的控制周期为0.001 s,程序框图如图6(b)所示。当有光电编码器的Z脉冲到来时,进入Z脉冲中断服务程序,把计数器T2计的脉冲数清零,防止转子转动过程中的脉冲累积误差;每当上位机发送指令时,触发SCI通信中断,DSP根据相应的指令发送数据到上位机。

图6 主程序和PWM中断服务子程序
2.3 试验结果
该系统的 PMSM参数如下:定子电阻为0.9 Ω,直、交轴电感为 Ld=Lq=0.8 mH,转子磁链为0.328 7 Wb,额定功率为22 kW,额定频率为50 Hz,额定电压为400 V,额定电流为70 A,额定转速为1 500 r/min,极数为4。
图7所示为给定转速1 000 r/min,起动时的转速和A相电流波形。
图8所示为给定转速1 000 r/min,稳态加载5 N·m时的转速和A相电流波形。
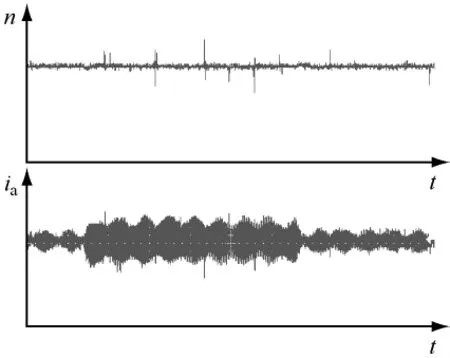
图8 1 000 r/min且加载5 N·m时速度和A相电流波形
由图7可看出,采用增量限幅的增量式PID控制器的电动机起动电流很小,这可以大大减小起动电流对电机的冲击,延长电机的使用寿命。
3 结语
介绍了SVPWM方法及其数字化实现,并将该调制方法应用到面贴式PMSM的id=0的调速控制系统中。采用了带有U、V、W信号检测的增量式光电编码器来完成转子的初始定位和角度测量,带有增量限幅的PID控制器可以有效减小电机的起动电流。理论分析及试验结果表明,系统能够实现最大转矩电流比,达到了较满意的调速效果和控制性能。
[1]田亚菲,何继爱,黄智武.电压空间矢量脉宽调制(SVPWM)算法仿真实现及其分析[J].电力系统及其自动化学报,2004,16(4):68-71.
[2]佘艳.基于SVPWM矢量控制变频仿真分析[J].电气传动自动化,2009,31(5):23-26.
[3]Sharma R K,Sanadhya V,Behera L,et al.Vector control of a permanent magnet synchronous motor[C]∥India Conference,INDICON 2008,Annual IEEE,2008(1):81-86.
[4]余浩赞,王辉,黄守道.永磁同步电机控制系统全数字化实现[J].电力电子技术,2009,43(1):25-27.
[5]Liu Jun,Wu Chun Hua,Huang Jian Min,et al.Research on the starting method of sensorless PMSM based on electrical steady-state model[J].Industrial Electronics,2009:519-522.
[6]苏奎峰,吕强.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[7]陈荣.基于增量式光电编码盘的永磁同步电机转子位置初始定位[J].电机与控制应用,2007,34(3):32-35.
[8]Zhang B,Li Y,Zuo Y.A DSP-based fully digital PMSM servo drive using on-line self-tuning PI controller[C]∥Proc PIEMC,2000(2):1012-1017.
[9]周卫平,吴正国,唐劲松,等.SVPWM的等效算法及SVPWM与SPWM的本质联系[J].中国电机工程学报,2006,26(2):134-137.
