双闭环直流调速仿真系统的设计与实现
2010-09-20赵利
赵利
(山西大同大学工学院,山西大同037003)
双闭环直流调速仿真系统的设计与实现
赵利
(山西大同大学工学院,山西大同037003)
面向电气原理结构图仿真方法无需编程且不需推导系统的动态数学模型,系统的建模过程接近实际系统的搭建过程,仿真结果的可信度很高.本文以工程上用的最多的双闭环直流调速系统为例,详细介绍系统建模过程、元器件参数设置及建模注意的问题,并对仿真结果进行分析.掌握该方法,有助于自动化专业学生对所学理论的理解,提高其实践动手能力,对今后的课程设计和毕业设计具有重要指导意义.
电气原理结构图 双闭环直流调速系统 建模 MATLAB仿真
“运动控制系统”是自动化专业一门专业主干课程,该课程的要点是:从实际出发,深入地进行理论分析,应用理论解决运动控制中的实际问题,以计算机仿真等实验手段验证理论分析结果,提高学生分析问题和解决问题的能力.因此,“运动控制系统”是培养自动化专业学生理论联系实际的关键课程.
工程上用的最多的典型Ⅱ型系统是运动控制系统的基础,所以掌握双闭环直流调速系统的设计及其计算机仿真方法,对后续的课程设计和毕业设计具有重要的指导意义.
目前,使用MATLAB对控制系统进行计算机仿真的主要方法是以控制系统的传递函数为基础,使用MATLAB的Simulink工具箱对其进行计算机仿真研究.本文提出一种面向控制系统电气原理结构图,即使用Power System工具箱进行调速系统仿真的新方法.
在MATLAB5.2以上的版本中新增了一个电力系统(Power System)工具箱(本文使用MATLAB6.5版本),该工具箱与控制系统工具箱有所不同,用户不需自己编程且不需推导系统的动态数学模型,只需要从工具箱的元件库中复制所需要的电气元件,按电气系统的结构进行连接,系统的建模过程接近实际系统的搭建过程,且元件库中的电气元件能较全面地反映相应实际元件的电气特性,仿真结果的可信度很高.
面向电气原理结构图的仿真方法如下:首先以调速系统的电气原理结构图为基础,弄清楚系统的构成,从Power System和Simulink模块库中找出对应的模块,按系统的结构进行建模;然后对系统中的各个环节进行元件参数设置,在完成各环节的参数设置后,进行仿真参数的设置;最后对系统进行仿真实验,并进行仿真结果分析.为了使系统得到好的性能,通常要根据仿真结果来对系统的各个环节进行参数的优化调整.
按照这一步骤,本文将采用面向系统电气结构图的仿真方法,对典型的双闭环直流调速系统进行仿真研究.
1 系统的建模和模型参数的设置
双闭环调速系统的特征是系统的电流和转速分别由两个调节器控制,主电路采用三相桥式全控整流电路供电.速度调节器ASR、电流调节器ACR均设有限幅电路,ASR的输出作为ACR的给定,利用ASR的输出限幅起限制启动电流的作用;ACR的输出Uc作为触发器的移相控制电压.双闭环直流调速系统的电气原理结构图如图1所示.
系统的建模包括主电路的建模和控制电路的建模两部分.
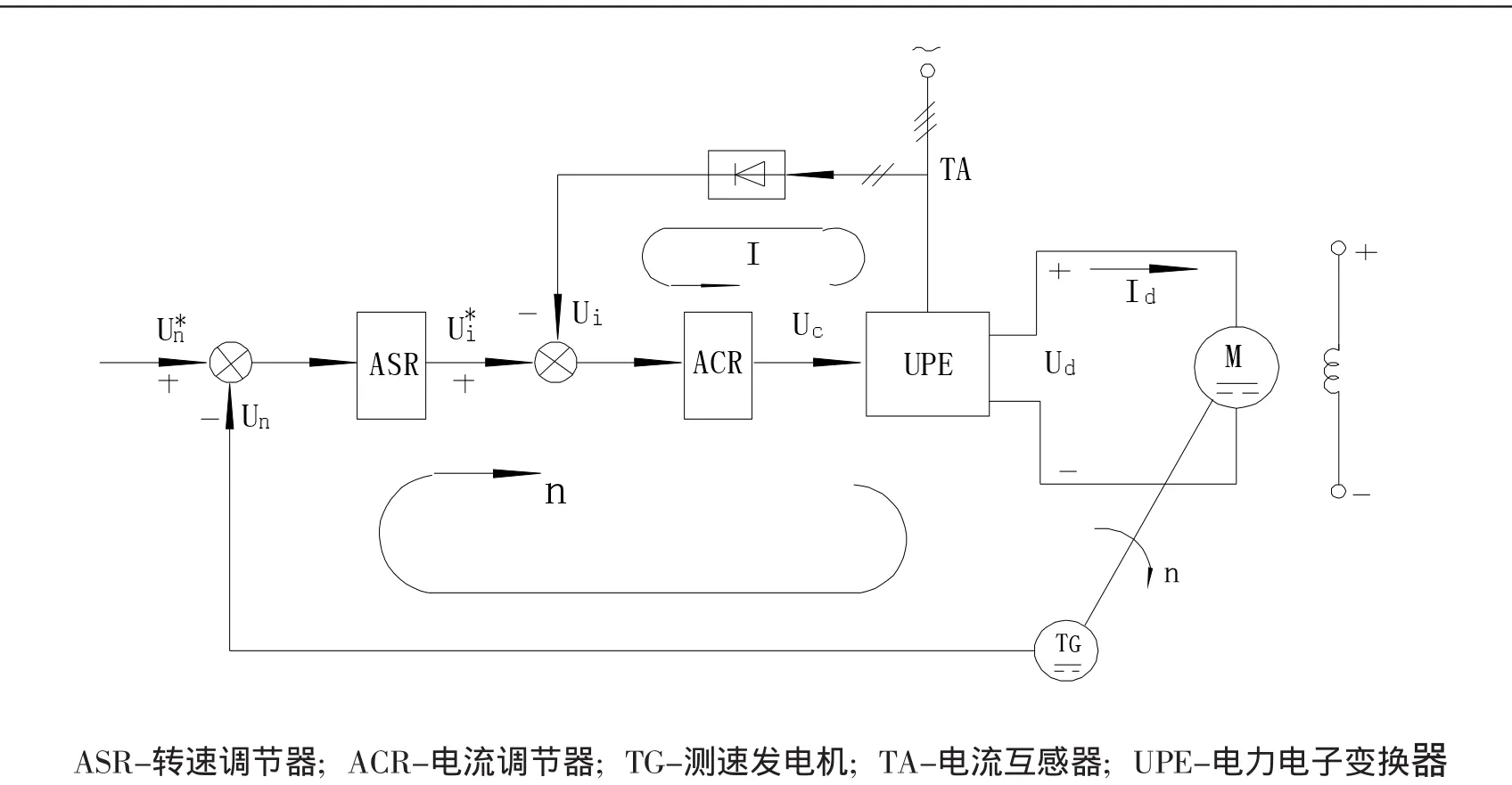
图1 双闭环直流调速系统的电气原理结构图
1.1 主电路的建模和参数设置
由图1可见,双闭环直流调速系统的主电路由三相对称交流电源、晶闸管整流桥、平波电抗器、直流电动机等部分组成.由于同步脉冲触发器与晶闸管整流桥是不可分割的两个环节,通常作为一个组合体来讨论,所以将触发器归到主电路进行建模.
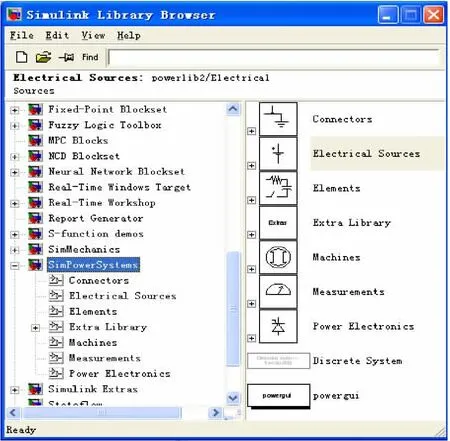
图2 电力系统工具箱
以三相对称交流电压源为例,说明主电路各部分的建模和参数设置方法.
首先打开电力系统(SimPower Systems)工具箱,如图2.从电源模块组(Electrical Sources)中选取一个交流电压源模块,再用复制的方法得到三相电源的另两个电压源模块,并用模块标题名称修改方法将模块标签分别改为A相、B相、C相;然后从连接器模块组(Connectors)中选取“Ground”元件和“Bus Bar”元件,将三相电源接成星形连接方式.
为了得到三相对称交流电压源,其参数设置方法及参数设置如下:
双击A相交流电压源图标,打开电压源参数设置对话框,A相交流电源参数设置:幅值取220V、初相位设置成0°、频率为50Hz、其它为默认值,如图3所示.B、C相交流电源参数设置方法与A相相同,除了将初相设置成互差120°外,其它参数与A相相同.由此可得到三相对称交流电源.
采用上述原则,可分别对晶闸管整流桥、平波电抗器、直流电动机等各部分进行建模和参数设置.
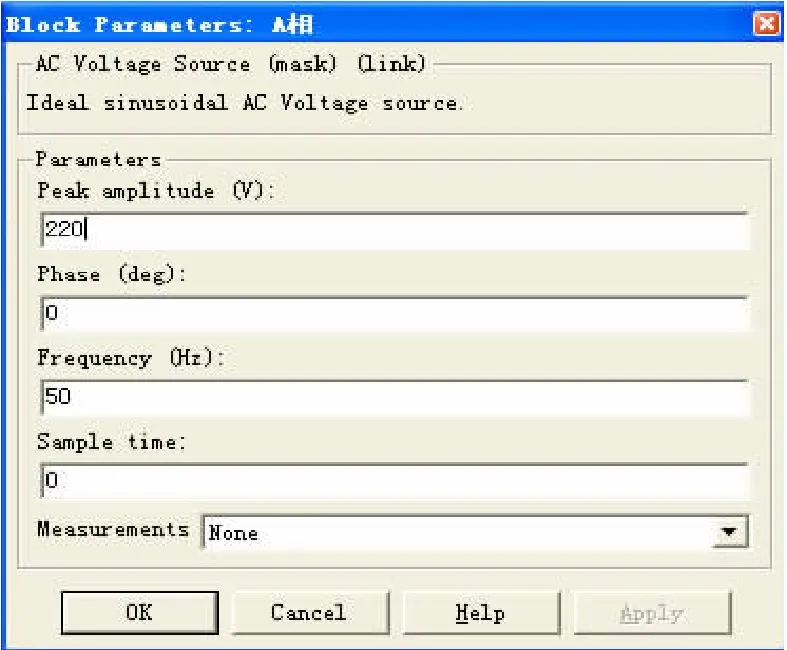
图3 A相电源参数设置
1.2 控制电路的建模和参数设置
转速、电流双闭环系统的控制电路包括:给定环节、速度调节器ASR、电流调节器ACR、限幅器、偏置电路、反相器、电流反馈环节、速度反馈环节等.
1.2.1 同步脉冲触发器的建模和参数设置
同步脉冲触发器包括同步电源和6脉冲触发器两部分.6脉冲触发器可从图2的附加元件库(Extra Library)的子模块组控制模块(Control Blocks)获得.6脉冲触发器需用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压.同步电源与6脉冲触发器及封装后的子系统符号如图4(a)、(b)所示.
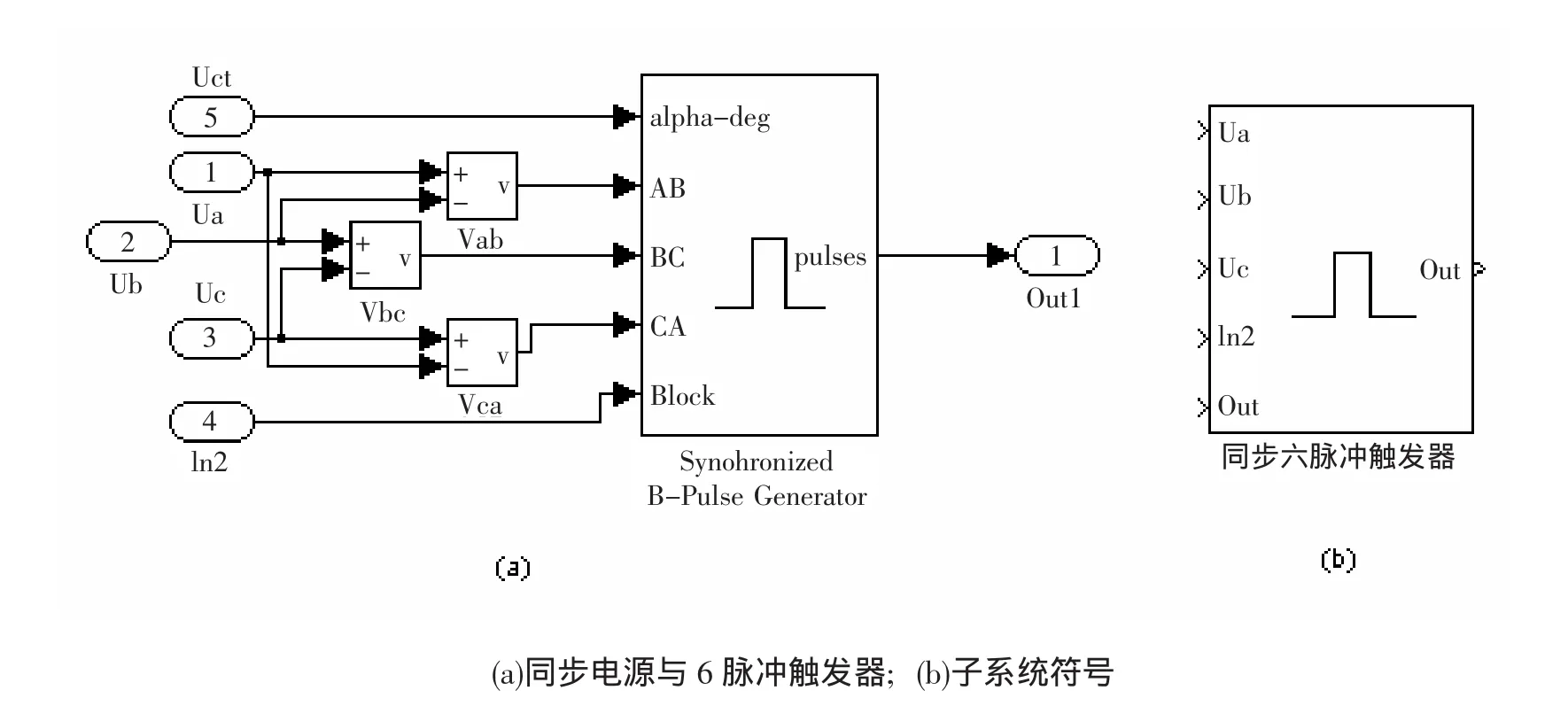
图4 同步触发脉冲器和封装后的子系统符号
1.2.2 给定环节的建模和参数设置
从输入源模块组中选取“Constant”模块,并将模块标签改为“给定环节”;然后双击该模块图标,打开参数设置对话框,将参数设置为某个值,此处设为130 rad/s.实际调速时,给定信号是在一定范围内变化的,读者可通过仿真实践,确定给定信号允许的变化范围.
1.2.3 ACR限幅值的确定
通过对Uc参数变化范围仿真实验的探索而知,当Uc(即图4中3端)在50~310范围内变化时,同步脉冲触发器能够正常工作;当Uc为50时,对应的整流桥输出电压最大,而Uc为310时对应的输出电压反而最小,它们是单调下降的函数关系.为此,将限幅器的上、下限幅值设置为 [130,-130],用加法器加上偏置“-180”后调整为[-50,-310],再经反相器转化为[50,310].这样,在电流环系统内通过限幅器、偏置、反相器等模块的作用,就可将ACR的输出限制在使同步脉冲触发器能够正常工作的范围之内.同理,可设置ASR的上、下限幅值为[40,-40].
速度调节器、电流调节器、限幅器、偏置、反相器等模块的建模与参数设置都比较简单,只要分别在Simulink的Math、Nonlinear、Sources模块库中找到相应的模块,并按要求设置参数即可.
两个PI调节器的参数设置分别是:ACR:Kpi= 2,τi=100,上、下限幅为 [130,-130];ASR:Kpn= 1.2,τn=10,上、下限幅为 [40,-40].电流反馈系数设为0.1,速度反馈系数设为1.
1.3 双闭环直流调速系统的仿真模型
将上述主电路和控制电路的仿真模型按照双闭环直流调速系统电气原理图的连接关系进行模型连接,即可得到图5所示的闭环直流调速系统仿真模型.
图5是采用面向电气原理结构图方法构成的双闭环直流调速系统的仿真模型.注意到,在整流桥后面,并联了一个二极管,它的作用是加快电动机的减速过程,同时避免在整流桥输出端出现负电压而使波形畸变.当然,模型中没有这个二极管,仿真结果也可以出来.图5中触发器开关信号为“0”时,开放触发器;为“1”时,封锁触发器.
1.4 系统的仿真参数设置
在MATLAB的模型窗口打开“Simulink”菜单,进行“Simulink”设置,点击“Simulink parameters…”菜单后,得到仿真参数设置对话框,仿真中所选择的算法为ode23tb,由于实际系统的多样性,不同的系统需要采用不同的仿真算法,到底采用哪一种算法,可通过仿真实践进行比较选择;仿真Start time一般设为0;Stop time根据实际需要而定,一般只要能够仿真出完整的波形就可以了,此处设为0.25 s.
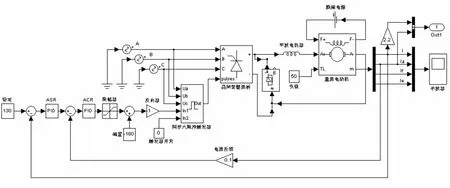
图5 双闭环直流调速系统的仿真模型
2 系统的仿真及仿真结果
当建模和参数设置完成后,即可开始进行仿真.
在MATLAB的模型窗口打开“Simulation”菜单,点击“Start”命令后,系统开始进行仿真,仿真结束后可输出仿真结果.
根据图5的模型,系统有两种输出方式:当采用“示波器”模块观察仿真输出结果时,只要在系统模型图上双击“示波器”图标即可;当采用“out1”模块观察仿真输出结果时,可在MATLAB的命令窗口输入绘制命令plot(tout,yout)即可得到未经编辑的“Figure No.1”输出的图形,对“Figure No.1”图形编辑后得到的转速、电流双闭环系统仿真图形如图6所示.
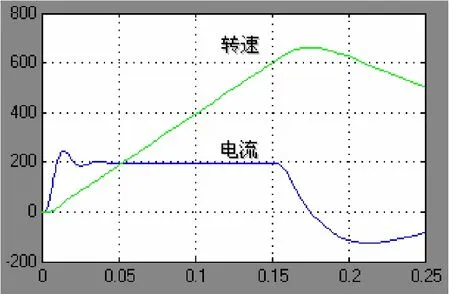
图6 转速、电流双闭环系统的仿真曲线
3 仿真结果分析
从图6仿真结果可以看出,它非常接近理论分析的波形,说明系统的建模与仿真是成功的.下面对仿真的结果作一分析.
启动过程的第一阶段是电流上升阶段.突加给定电压,ASR的输入很大,其输出很快达到限幅值,电流也很快上升,接近其最大值.第二阶段,ASR饱和,转速环相当于开环状态,系统表现为恒值电流给定作用下的电流调节系统,电流基本上保持不变,拖动系统恒加速,转速线性增长.第三阶段,当转速达到给定值后,转速调节器的给定与反馈电压平衡,输入偏差为0,但是由于积分的作用,其输出还很大,所以出现超调.转速超调之后,ASR输入端出现负偏差电压,使它退出饱和状态,进入线性调节阶段,使速度保持恒定,实际结果基本上反映了这一点.
4 结束语
在转速、电流双闭环直流调速系统建模与仿真结束之际,将建模与仿真参数设置的一些原则和方法归纳如下:
1)系统建模时,将其分成主电路和控制电路两部分分别进行.
2)在进行参数设置时,晶闸管整流桥、平波电抗器、直流电动机等装置(固有环节)的参数设置原则是:如果针对某个具体的装置进行参数设置,则对话框中的有关参数应取该装置的实际值;如果是不针对某个具体装置的一般情况,可先取这些装置的参数默认值进行仿真.若仿真结果理想,可认可这些设置的参数;若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数.
3)给定信号的变化范围、调节器的参数和反馈检测环节的反馈系数等可调参数的设置,其一般方法是通过仿真实验,不断进行参数变化.具体方法是分别设置这些参数的一个较大值和较小值进行仿真,弄清它们对系统性能影响的趋势,据此逐步将参数进行优化.
4)仿真时间根据实际需要而定,以能够仿真出完整的波形为前提.
5)由于实际系统的多样性,没有一种仿真算法是万能的.不同的系统需要采用不同的仿真算法,到底采用哪一种算法更好,这需要通过仿真实践,从仿真能否进行、仿真的速度、仿真的精度等方面进行比较选择.
[1]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006:97-105.
[2]李国勇,谢克明.控制系统数字仿真与CAD[M].北京:电子工业出版社,2003:130-148.
[3]常鸣,袁浩,郝莹.基于MATLAB engine的自动控制原理仿真实验设计[J].电气电子教学学报,2006,28(3):60-63.
[4]李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2005:174-180.
[5]张晓华.控制系统数字仿真与CAD[M].北京:机械工业出版社,2006:197-202.
[6]黄坚.自动控制原理及其应用[M].北京:高等教育出版社,2004:52-56.
Abstract:The simulation method of using schematic diagram need neither programming nor deriving mathematical model of the dynamic system,while modeling being close to the actual process,so the credibility of simulation results is higher.Taking an example for double-loop DC adjustabled-speed system,which is widely used in the electrical engineering,this paper introduces the modeling process,Components parameter setting,the issue of modeling and analyzing the simulation results in the last.Mastering the method,it will be useful for students to understand the theory,to improve their practical capacity,and it is of important significance for design of curriculum and graduation in a later.
Key words:schematic Diagram;double-loop DC adjustabled-speed system;building model;Matlab simulation
〔编辑 石白云〕
Design and Implementation of Double-Loop DC Speed Control Simulation System
ZHAO Li
(School of Engineering,Shanxi Datong University,Datong Shanxi,037003)
TP15
A
1674-0874(2010)03-0070-05
2010-04-12
山西大同大学科学研究项目[2008]
赵利(1968-),男,山西天镇人,硕士,副教授,研究方向:电力传动与运动控制.
