基于新型变结构控制策略的直接转矩控制系统研究
2010-09-20邓国璋
邓国璋
黄冈职业技术学院
0 引言
直接转矩控制(direct torque control,DTC)是上个世纪八十年代由德国鲁尔大学的Depenbrock教授提出的一种高性能交流变频调速技术,并成功应用于感应电机控制领域。直接转矩控制技术放弃了矢量控制中电流解耦的控制思想,省略了电压调制模块和电流反馈环,通过检测定子电压和定子电流,直接计算出电机的磁链和转矩,并采用两个滞环比较器直接实现对定子磁链和转矩的解耦控制,因此具有结构简单、转矩响应快、对系统内部参数摄动和外部干扰鲁棒性强等优点,但同时也存在电流、磁链和转矩脉动大,逆变器开关频率不固定,系统低速运行时难以精确控制以及因转矩脉动引起的高频噪声等问题[1]。很多研究[2]-[5]表明,将空间矢量调制技术与直接转矩控制相结合可以有效解决DTC磁链和转矩的波动,并且可以实现逆变器开关频率恒定。然而在空间矢量转矩控制系统中,速度控制一般采用PI调节器,其中比例系数越大系统响应速度越快,但同时也增加了系统对噪声的敏感性,积分环节的主要作用是消除系统的稳态误差,但存在积分饱和问题,容易对系统的稳定性造成不利的影响。同时其设计过程比较依赖于控制对象的数学模型,对非线性、强耦合对象的适应性较差,对系统参数、外部扰动缺乏鲁棒性,因此在低速时很难达到较为理想的控制性能。
变结构控制(variable structure control,VSC)是一种鲁棒性较强的非线性控制方法,具有结构简单、响应快速、对系统参数摄动及外部扰动不敏感等优点。然而传统变结构控制中离散化采样延迟、开关器件惯性等因素容易导致“抖振”问题,引起高频振荡,对系统的控制性能造成很大危害。因此本文提出一种新型控制策略,将变结构和PI控制相结合,在变结构策略中采用带有线性区间的非线性控制结构,既能利用非线性特性抵偿内外扰的影响,又能实现系统在原点附近无抖振,在保证变结构控制快速性和鲁棒性优点的同时,有效改善了系统的性能。
1 感应电机直接转矩控制
感应电机直接转矩控制系统的结构如图1所示,磁链环和转矩环均采用滞环调节器,根据调节器的输出通过开关向量表选择合适的电压矢量,对磁链和转矩进行控制。图中定子磁链可由如下表达式计算:
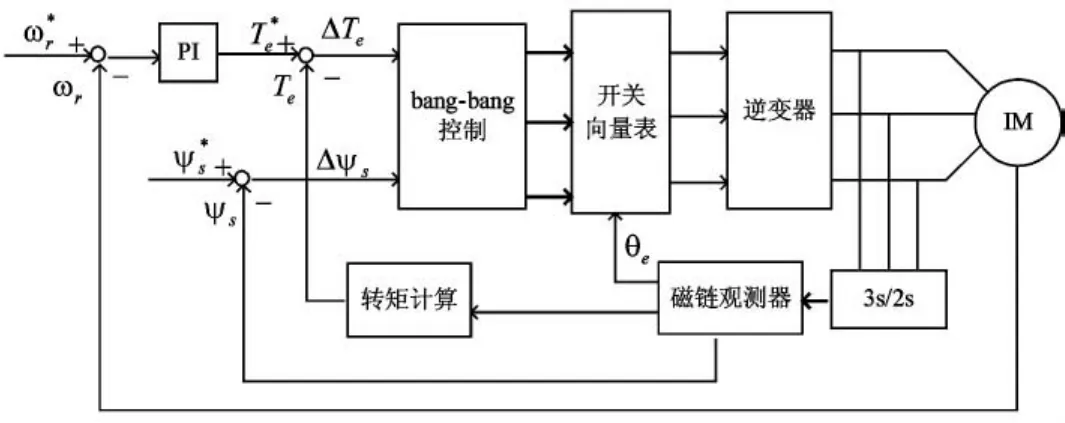
图1 感应电机直接转矩控制系统结构框图

式中 ψs、Vs和Is分别为定子磁链、定子电压和定子电流,Rs为定子电阻。
在静止两相坐标系下,电磁转矩Te可由式(2)计算:

其中 ψsα,ψsβ分别为定子磁链的 α, β 分量,Isα, ψsβ分别为定子电流的 α,β分量,np为电机极对数。
2 基于VSC的空间矢量直接转矩控制
基于变结构控制的空间矢量直接转矩控制系统的原理如图2所示。转速给定值ω*r与反馈值 ωr之差经过速度环控制器,得到电磁转矩的给定信号。由转矩观测值Te与相比较得到转矩误差信号ΔTe,经过PI调节器,再与 ωeψs相加生成定子电压分量。由定子磁链观测值 ψs与定子磁链给定信号相比较得到磁链误差信号Δψs,再经过PI生成定子电压分量,然后结合定子磁链位置角 θψs进行坐标变换,从而产生SVM模块的输入电压指令和,最后由SVM的输出控制逆变器的开关信号。图中速度环控制器的结构如图3所示。下面将对速度环控制策略的设计进行具体分析。
其中Te为电磁转矩,TL为负载转矩,np为转子极对数,J为转动惯量,ωr为电气角速度,B为摩擦系数,则速度环的跟踪误差:

对图3所示的控制器,其控制量:

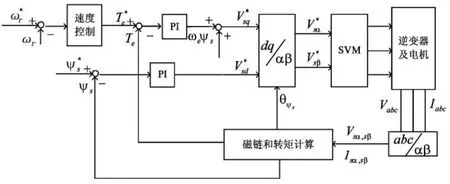
图2 基于VSC的空间矢量直接转矩控制系统结构框图
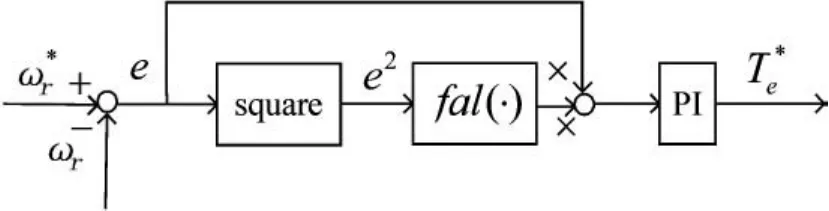
图3 速度环控制器结构图
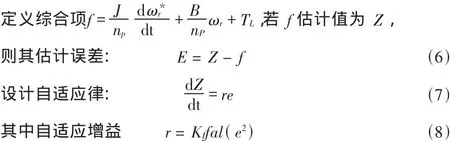
带有线性区间的非线性fal函数定义如下
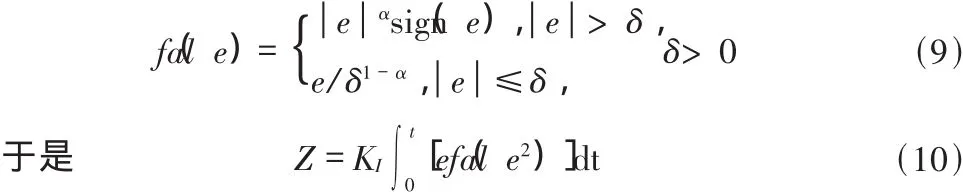
为了保证Z对f观测误差的有界性,本文引入不连续投影算子[6]对自适应律加以修正:
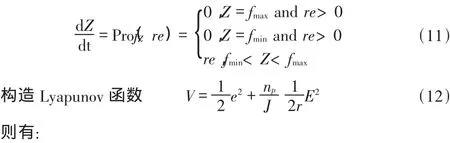
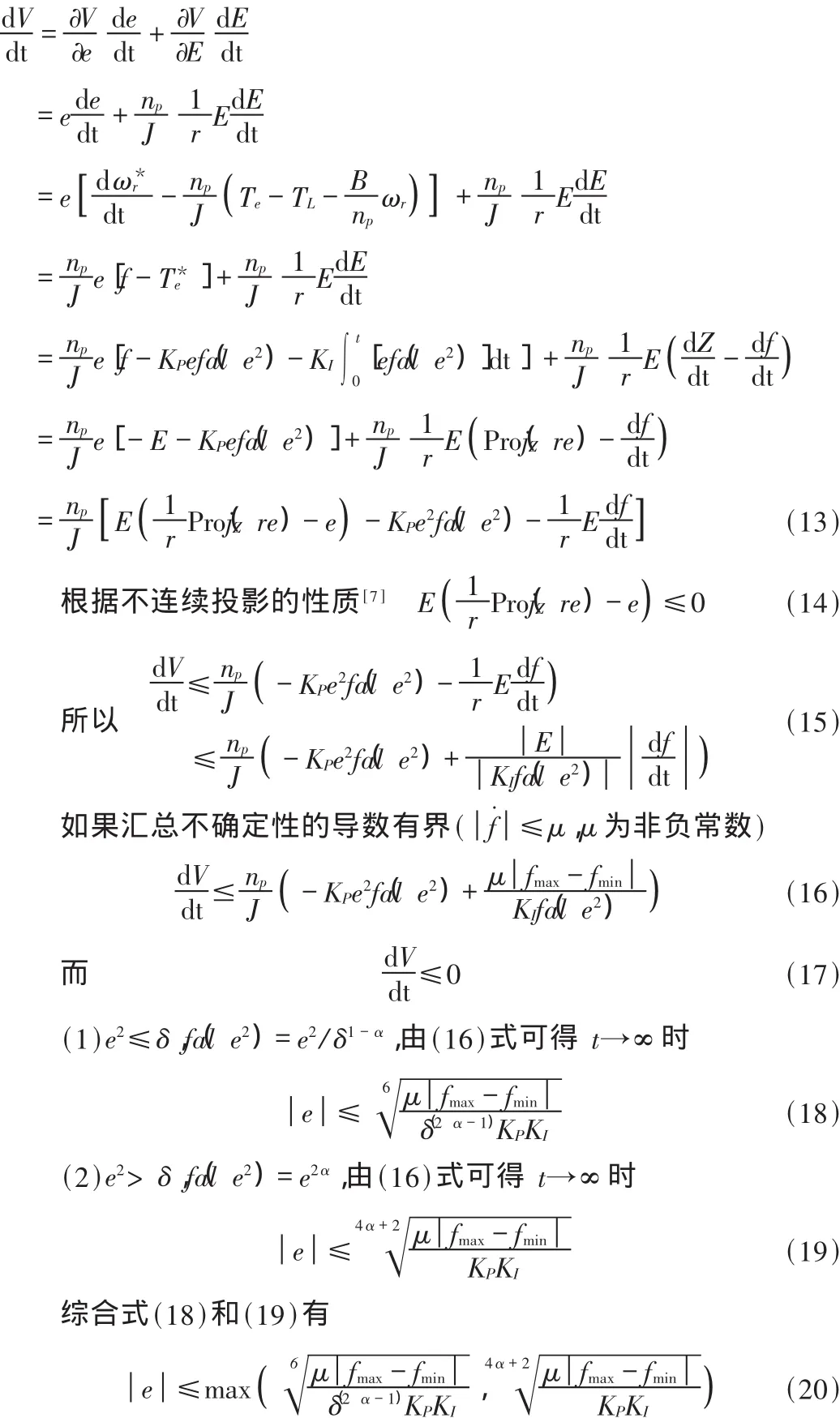
因此对图2中的直接转矩控制系统,若采用图3所示的控制器,以及式(7)~(11)描述的自适应律,则系统全局一致渐近有界。
3 仿真实验分析
为了验证本文提出控制策略的有效性,应用Matlab/Simulink对图2和图3所示系统进行了仿真实验,并将仿真结果进行了对比。仿真时所用的感应电机参数如下:
额定功率:5.5kW 额定电压:380V
额定频率:50Hz 极对数:2
定子电阻:0.813Ω 转子电阻:0.531Ω
定子电感:0.10626H 转子电感:0.10875H
励磁电感:0.1024H 转动惯量:0.02kg·m2
图1滞环控制器的容差范围设为0.001。电机起动时给定转速设为0转/分,0.2秒时电机转速变为150转/分,0.5秒给系统突加TL=35N·m的额定负载,仿真结果如图5至图7所示。
图4和图5为直接转矩控制系统和基于VSC的空间矢量直接转矩控制系统的转矩响应曲线及其局部放大图。从图中可以看出,这两种系统的转矩动态响应速度没有明显差异,直接转矩控制系统的转矩波动范围为±2N·m,基于VSC的空间矢量直接转矩控制系统的转矩脉动为±1N·m,大约减小了50%。图6为系统的转速响应曲线,由图可知转速突变和突加负载时,直接转矩控制系统的转速波动较大,到达稳态的时间较长,而基于VSC的空间矢量直接转矩控制系统转速响应较快,超调较小,加载后的恢复时间较短,表明本文提出的控制策略在改善了系统性能的同时有效解决了抖振问题,
5 结论
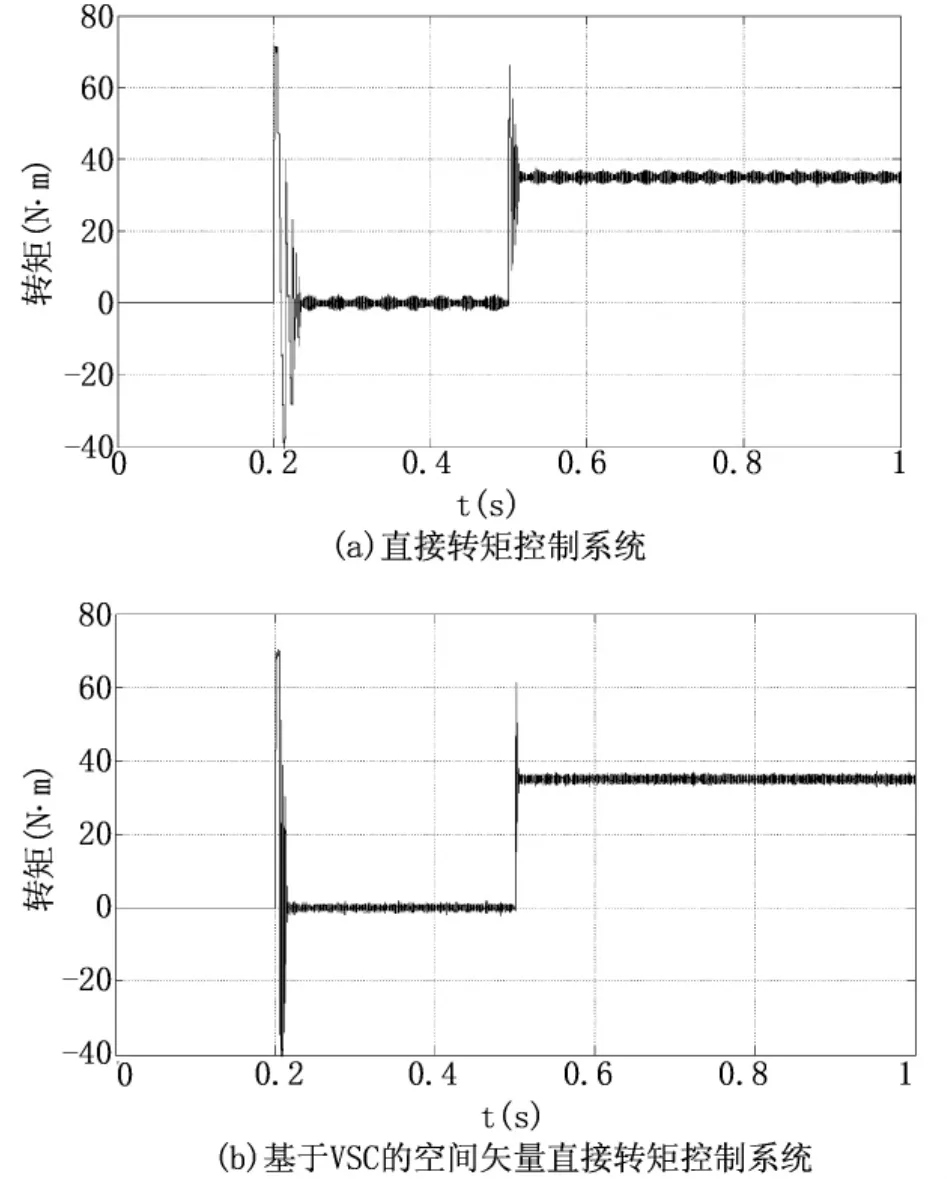
图4 转矩响应
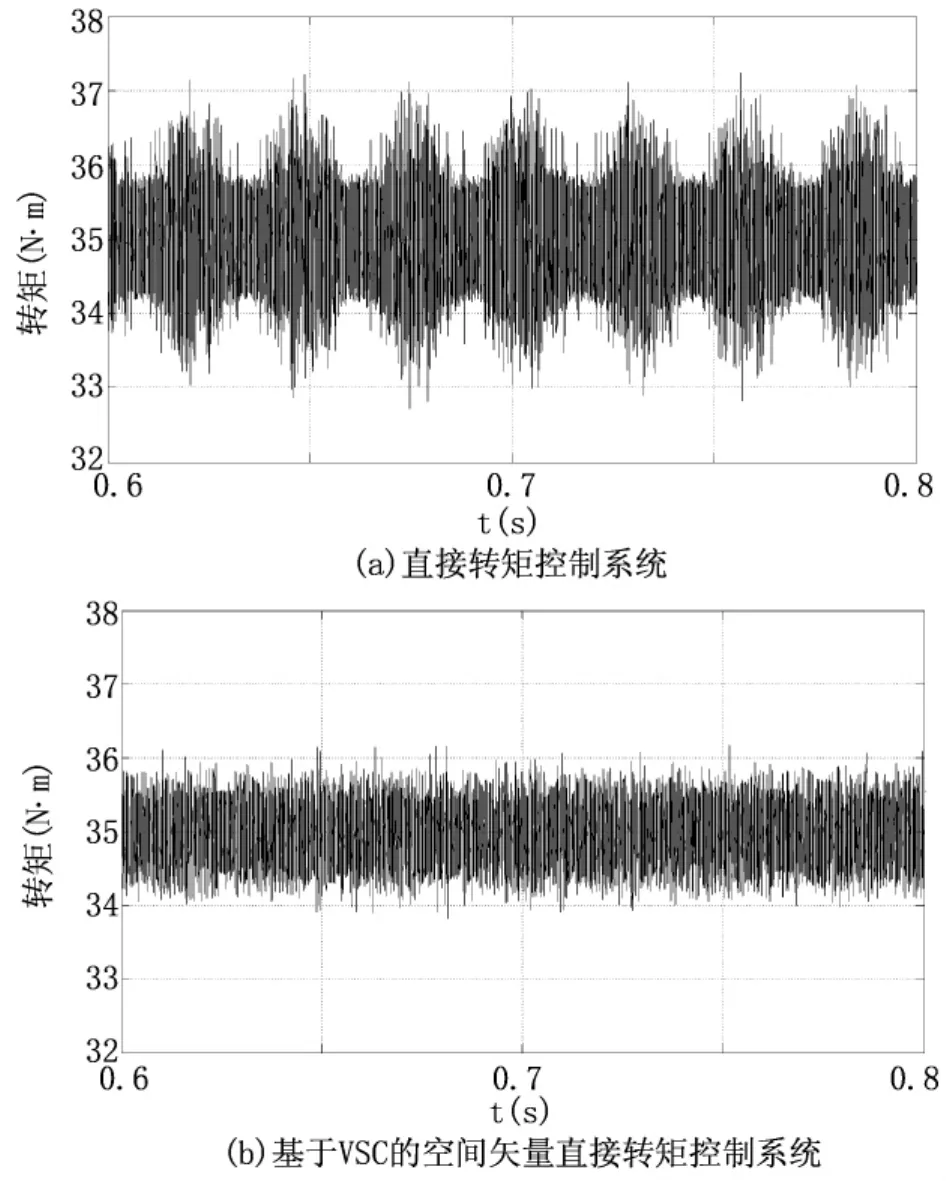
图5 转矩响应局部放大图
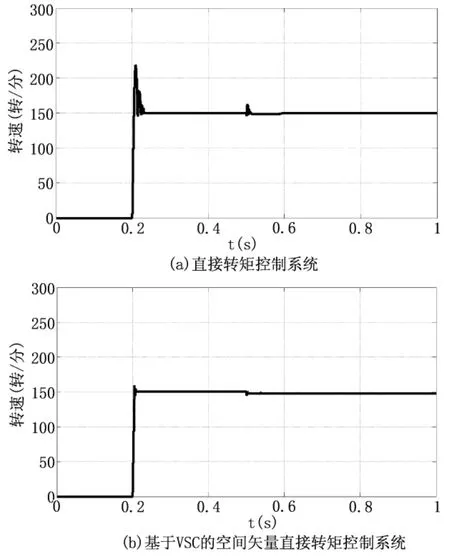
图6 转速响应
针对感应电机直接转矩控制系统磁链和转矩波动大、逆变器开关频率不固定等问题,本文提出一种新型控制策略,在变结构控制中采用带有线性区间的非线性控制结构,保证变结构控制快速性和鲁棒性的同时,又能实现系统在原点附近无抖振,有效改善了系统的动态和稳态性能,具有一定的理论和实用价值。
[1]贾洪平,孙丹,贺益康.基于滑模变结构的永磁同步电机直接转矩控制[J].中国电机工程学报,2006,26(20):134 ~ 138.
[2]Lai Y.S., Chen J.H.A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction[J].IEEE Transactions on Energy Conversion.2001,16(3):220 ~227.
[3]Lascu C.,Boldea I., Blaabjerg F.Very-low-speed variable-structure control of sensorless induction machine drives without signal injection[J].IEEE Transactions on Industry Applications.2005,41(2):591 ~ 598.
[4]Zelechowski M.,Kazmierkowski M.P.,Blaabjerg F.Controller design for direct torque controlled space vector modulated(DTC-SVM)induction motor drives[J].Proceeding of Power Electronics and Drive Systems,2005,951~956.
[5]Shady M.Gadoue,Damian Giaouris and John W.Finch.Sensorless Control of Induction Motor Drives at Very Low and Zero Speeds Using Neural Network Flux Observers[J].IEEE Transactions on Industrial Electronics,2009,56(8):3029~3039.
[6]Sastry S.,Bodson M.Adaptive Control-Stability Convergence and Robustness[M].New Jersey:Prentice Hall, 1989:58 ~ 65.
[7]Loannou P., Fidan B.Adaptive Control Tutorial[M].Philadelphia:Society for Industrial and Applied Mathematics, 2006:52~63.