微流量传感器及其在压电泵闭环控制中的应用❋
2010-09-11杨晓亚刘亚欣陈立国曲东升荣伟彬
杨晓亚,刘亚欣,陈立国,曲东升,荣伟彬
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨 150080)
0 引 言
生物试剂的高精度、自动化分配是生物、化学、医药等领域不可或缺的实验操作手段[1-3].在蛋白质分离、免疫分析、DNA分析和测序、细胞培养及检测、药物筛选等方面具有重要应用.目前,随着生命科学实验高通量化发展,对试剂分配的精度和可观性提出了更高要求[4-7].
压电泵是微流量系统中典型的微执行部件,它是利用压电元件(压电片或压电叠堆)作为换能器进行流体传输的.它具有结构简单、体积小、重量轻、驱动力大、低泄漏、响应时间短、耗能低、无噪声、无电磁干扰等优点[8].输出高精度的流量是压电泵的发展趋势[9].由于压电陶瓷存在磁滞、蠕变等特点,使得压电泵分配试剂的精度不易控制,影响其在更高精度要求场合的应用.针对压电泵的特点,本文提出了研制一种流量传感器,使传感器与压电泵集成,进而建立具有微流量试剂输送与自检测功能的闭环控制系统.文中首先介绍压电泵流量控制系统的组成及工作原理;然后阐述了适用于压电泵流量控制系统的传感器的设计过程,给出了传感器信号的校准和标定过程;通过实验测出所设计的传感器的动态响应速度和重复测量精度;之后建立了传感器与压电泵集成的闭环控制系统,并在所搭建的压电泵闭环控制系统基础上进行了定量试剂分配性能测试实验.
1 压电泵闭环控制系统的组成原理
图1为压电泵闭环控制系统框图,它主要包括压电微泵、微流量传感器、控制器、流量信号的显示模块、压电泵驱动电源以及其他辅助器件(如试剂、管路等).
控制系统的工作原理如下:由压电陶瓷驱动电源驱动压电泵工作,压差式微流量传感器检测的信号通过调理芯片进行放大、转换成压电泵的流量,然后将流量信号传给控制器,控制器根据流量值进行计算得到实际分配的试剂体积,之后与目标体积值进行判断,调整驱动电源的输出电压,来调节压电泵的输出以达到要求的体积值.这样就可以做到实时控制压电泵驱动电压,提高了压电泵的输出精度.在此过程中,流量显示模块实时显示压电泵的流量信息以方便观察.可见,压电泵闭环控制系统具有微流量输送与自检测功能.
考虑到传感器与压电泵的系统集成及实现微流量控制系统的小型化与便携化,传感器的尺寸应与压电泵的结构尺寸一致.本文使用的是吉林大学设计制造的膜片式压电泵[10].已知压电泵的外径是Ф27 mm,输出流速不大于 20μL/s,最大压强是 35 kPa.从而确定微流量传感器的外径为Ф27 mm,检测流速量程为 20μL/s,且传感器流过流体流速最大时,压力损失不超过 25 kPa.
2 微流量传感器的研制
2.1 微流量传感器芯片结构设计
2.1.1 流速检测原理
液体流经细小管路时,管路两端压力损失和流速之间的关系可用式(1)表示[11]

式中:Δp为压力差;Qv为流速;C为无量纲摩擦因数;_为粘度;L为管路长度;A为管路截面积;Dh为管路的水力直径.
可见,当液体粘性、管路尺寸确定后,通道两端压差和流速呈线性关系;并且流速检测的灵敏度可通过调整 A,L和 D来实现.即可以通过测量液体流过通道时产生的压差来实现流速的快速测量.

2.1.2 传感器芯片结构设计
传感器芯片的结构设计主要包括硅杯结构设计、微流量通道设计、压阻条设计等三部分.
在硅杯结构尺寸设计分析时,首先须保证硅膜变形满足小挠度理论,即压力作用下最大变形远小于膜厚;其次,满量程压力下产生的应力应小于硅的弹性极限;最后,传感器满量程输出应尽可能大(桥压10 V时输出应大于 100 mV).由此,确定硅膜尺寸 22 mm,厚度 50μm;硅芯片整体尺寸 4.5 mm×9 mm× 400μ m.
在设计微流量通道时,要根据流量检测量程和压力损失情况,综合考虑流阻大小,从而确定微通道尺寸.液体在具有较大宽深比微通道中流动时,无量纲摩擦因数 C值可初步取 72[12].这样若需要传感器量程 20μ l/s时,压力差不超过 25 kPa,则流阻 R应小于 1.25×1012N◦ s/m5.结合加工工艺中通道深度限制,确定通道截面深 30μ m,底部宽度 1000μ m.
压阻条设计时,应结合加工工艺和功耗、桥压等具体情况.本课题中传感器压力检测芯片中压阻条布置在硅膜边缘中心处且在压力传感膜片的上部,阻值为 2 k Ω,条宽 12μ m.
2.2 微流量传感器的加工和封装
2.2.1 传感器芯片加工
在传感器芯片结构尺寸设计的基础上,进行传感器芯片加工及其整体结构的封装.芯片加工中采用(100)晶向的双面抛光 N型硅片,硅片初始厚度约为 400μ m.关键工艺流程步骤可总结如图 2所示.具体的工艺流程描述如下:
1)采用热氧化(湿氧)的方法,在硅片的双面生长厚度为 0.5μ m的二氧化硅(SiO2)薄膜,如图2(a).
2)标准光刻和标准氧化层腐蚀形成压阻硼掺杂电阻图形.
3)标准淡硼离子注入,在经过标准再分布或退火形成方块电阻率在 270Ω压阻.
4)第二次光刻和标准氧化层腐蚀形成欧姆接触区图形.如图 2(b)所示.
5)采用双掩膜工艺进行硅杯和通道的加工.如图 2(c)~(g)所示.
6)去胶清洗.
7)标准光刻形成铝引线图形,并且湿法腐蚀铝.最后合金化形成铝引线.如图 2(h)~(i)所示.
8)清洗后硅片背面和玻璃键合.玻璃上面超声打孔.如图 2(j)所示.
2.2.2 传感器封装

图2 传感器芯片加工步骤示意图Fig.2 Process sequences of the pressure/flow-sensor chip
传感器封装结构设计截面示意如图 3所示.设计时考虑封装的密封性和坚固性以及传感器整体尺寸的指标,传感器芯片和带有孔径 1.8 mm的玻璃键合,形成流体通道和入口、出口两处压力检测腔.键合引线将芯片压阻连接到基底的 PCB板焊盘上.使用有机玻璃罩保护传感器芯片和键合引线.传感器信号校准和标定电路板通过接插件与基底上的PCB板相连.封装完成的实物见图4.封装后传感器的直径Ф26 mm,厚度 11 mm,满足设计要求.


2.3 传感器信号处理与显示
2.3.1 传感器信号调理
流量传感器通过检测微流量通道两端的压力差来实现流量检测,而通道两端的压力通过两个硅杯结构的压力传感结构进行检测.检测量是一定压力下电桥产生的电压输出,由此可以确定压力和电压的关系.在液体以一定流速流过传感器时,可以检测出传感器芯片两个电桥的输出,通过之前测出的电压和压力关系即可换算得到流速和压力差这一固有关系.这样在实际检测应用时,就可以依据电压输出信号,得到通道两端压力差,进而根据流速-压差这一固有关系换算出实际流速了.
这里采用美信公司的 M AX1452进行传感器信号的处理.信号处理电路分为两部分:一部分仅包含有两组 MAX1452芯片的基本调理电路,另一部分电路完成对调理电路进行校准补偿以及和计算机进行通信的功能.在进行压力-电压输出校准时,通过串口线与计算机连接,MAX1452的补偿程序可快速实现芯片的校准,并把校准信息烧写到 MAX1452芯片中.当校准和补偿完成以后,撤掉第二部分电路,只有封装在流量传感器中的第一部分基本电路进行工作,此时传感器工作在模拟模式,通过 PCI卡采集传感器输出端口的电压值到计算机中.如图 5所示.


2.3.2 显示模块设计为实时观测传感器测量数据值,本文设计了流量显示模块.其工作原理是根据传感器输出的上游、下游电压差值,再结合传感器标定时得出的电压和压力关系计算得出压差值;然后根据标定的流量-压差关系即可换算成流量值并将其显示出来.液晶显示模块以目前国内使用最广泛的一种单片机型 STC89C516RD为核心,使用 128×64点阵的汉字图形型液晶屏.电路原理框图如图 6所示.设计电路主要包括 A/D转换和液晶驱动电路;为了便于程序的烧写,将程序下载模块电路也集成在整个电路中.显示模块实物如图 7所示.显示模块工作程序流程如图 8所示.


2.4 传感器信号标定和性能测试实验
2.4.1 传感器信号标定实验
MAX1452是高度集成的信号处理器,它可以对传感器信号进行校准和标定.校准时,利用MAX1452自带的软件可调整并确定一定压力传感器芯片上游和下游电桥的电压输出,进而得到压力和电压关系曲线.标定时通过在一定流速下测量传感器芯片上、下游两个电桥的输出,再通过之前测出的压力和电压关系即可得到流速和压力差的关系.
经校准后的传感器信号输出电压 0.5~4.5 V.测量的传感器上游和下游处压力 p和电压输出 V关系式分别为


最终得到流速和压力差拟合关系式为

流速和压力差数据拟合的残差为 0.7003;相关系数为 0.9998.经计算无量纲摩擦因数 C值为84.3.比理论值 72略大,符合实际情况.
2.4.2 传感器性能测试实验
首先进行了流量传感器的响应速度测试,即在零流速下突然打开电磁阀,使管路中液体流动状态突然变化,观察传感器流速信号变化的时间.试验中采用示波器显示传感器在流速突然波动时反馈的电压信号,根据显示的流速信号输出得到传感器输出信号在4 ms内达到新的平稳值.由此可见传感器响应时间小于4 ms,具有较好的动态性能.

图9 检测精度测试实验系统原理图Fig.9 Experiment system of test precision
接下来进行了传感器流量检测精度测试.图 9所示是流量传感器检测精度测试系统原理图.试验中计算机控制注射泵的流速,显示模块显示流量传感器检测的流量.测试时将注射泵的流速设为 25μ L/s,多次采集传感器检测的流量值.然后,根据变异系数公式即可得到流量检测重复精度为0.65%(CV).由此可见,该流量传感器具有较高的响应速度和重复测量精度.
3 压电泵闭环系统搭建及实验研究
3.1 压电泵闭环系统的搭建
在完成 MEMS微流量传感器及其显示模块研制的基础上,搭建了如图 10所示的压电泵流量闭环控制系统.系统主要由流量检测模块、计算机控制模块、计算机通讯模块、压电陶瓷驱动模块、压电泵等部分组成.计算机控制模块采用上位机实现闭环控制算法及人机交互界面的编程.计算机通讯模块通过并口实现计算机对压电陶瓷驱动模块的控制;通过 PCI9111数据采集卡实现对流量检测模块流速信号的采集.压电陶瓷驱动模块根据计算机输出的电压信号实现压电泵不同频率和幅值的驱动电压输出.压电泵是系统的执行机构,通过压电膜振动实现一定体积试剂的分配.流量检测模块完成对压电泵输出流速的实时检测.

3.2 压电泵闭环控制性能实验
压电泵中压电膜片在电场的作用下通过弯曲振动从而驱动液体流动,其输出瞬时流速也和压电泵驱动电压一样呈正弦周期实时变化.压电泵平均输出流速不仅受管路尺寸和状态影响,且随着压电泵驱动电压幅值增大呈递增趋势;在不同频率电压驱动下压电泵流速也会有较大变化.这样,当压电泵驱动电压的幅值和频率确定后,仅通过标定的平均流速来确定压电泵工作时间,进而进行定量液体分配,势必会存在一定的偏差.而且,当压电泵停止工作后,管路中流速不会马上变为零,会有一定量残余液体继续流出,压电泵驱动电压越大,残余体积越多.这些,都会影响压电泵系统进行定量液体分配的精度.
为此,在搭建了压电泵闭环控制系统硬件的基础上,依据压电泵工作特性,本文将模糊控制与 PID控制两者结合起来,设计了一种模糊 PID控制器来实现压电泵精确的定量液体输出控制.该控制器原理示意如图 11所示.每次分配过程中把期望分配的液体体积 作为给定值,将反馈流速 积分运算得到的实际分配体积 V作为反馈值.在压电泵工作过程中,将给定值与实际计算值的偏差 e以及偏差的变化ec作为模糊控制器的输入变量.经过模糊控制器运算推理确定其输出变量即比例系数 Kp.将 Kp和偏差 e的乘积作为压电陶瓷驱动电源的输入控制信号 VA,进而不断调整压电泵驱动电压幅值 V.该控制方法一方面通过实时流速积分运算,减少了各种扰动因素对输出液体体
积的影响,另一方面驱动电压的灵活调整,最大限度地减少了压电泵临近停止工作状态时的驱动电压,减少了参与液体体积,确保了精确的体积液体分配.
最后,在该压电泵闭环控制系统搭建及其控制方法研究的基础上,进行了定量体积液体分配实验研究.首先,在开环状态下进行分配 100μL液体实验.此时压电泵驱动电压幅值 58 V,根据开环标定结果该电压驱动时每一个驱动脉冲分配 0.405μL左右试剂,那么工作 246个电压驱动周期将可以分配100μL试剂.本实验共进行 30次,将每一次实际分配液体体积绘制成如图 12所示曲线.从实验结果可以看出,压电泵系统开环状态下,实际分配体积与目标分配体积存在一定偏差,分配误差在 10% 左右.


图12 开环时分配 100μL体积的精度情况Fig.12 Dispensed volume for open-loop when the desired volume is 100μL
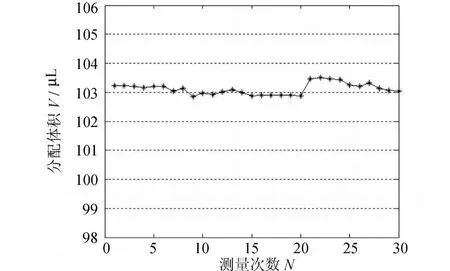
图13 实时积分闭环分配 100μ L水时的精度情况Fig.13 Dispensed v olume for real-time integral closed-loop when the desired v olume is 100μL
当利用传感器反馈流速信息不断实时积分进行闭环分配 100μL液体时,得到 30次分配结果如图13所示.可见对于压电泵闭环系统,在实时积分闭环控制下,压电泵系统开环分配的实际体积与目标体积的偏差在 4μL以内,分配精度有了较大提高.
最后,当采用模糊 PID闭环控制算法下,进行闭环分配 100μL液体时,得到 30次分配结果如图14所示.从实验结果可以看出,实际分配的体积和目标体积的偏差均在 0.1μL之内,具有较好的分配精度.
可见,压电泵采用模糊 PID控制算法后,相比于开环控制以及简单的实时积分控制,压电泵闭环控制系统可以自动地实现精确体积试剂的分配操作,提高了分配准确性和精度,具有很好的应用前景.

图14 采用模糊 PID闭环分配 100μL水时的精度情况Fig.14 Dispensed volume fo r fuzzy PID closed-loop when the desired volume is 100μ L
4 结 论
针对压电泵流量控制系统对压电泵输出流体流量快速、准确检测的需要,设计了一种基于压差原理的快速微流量检测传感器以及其检测数据的显示模块.文中阐述了流量检测的工作原理,结构尺寸设计原则.在此基础上确定了传感器芯片整体结构尺寸,并根据压电泵的结构参数完成了传感器的封装.然后设计了传感器测量信号的显示模块,并进行了传感器信号标定实验和性能测试实验,传感器集成在管路中后响应时间小于 4 ms,流量检测重复精度为 0.65%(CV),满足快速微流量检测需要.在完成上述工作的基础上搭建了压电泵流量闭环控制系统,同时引入了具有鲁棒性好、可靠性高和精度高的模糊PID控制算法.最后,进行了定量体积液体分配实验,实验结果表明:压电泵闭环控制系统利用模糊PID智能控制算法分配 100μL液体时,分配误差小于 0.1μL,实现了精确体积试剂的定量分配操作,具有很好的应用前景.
[1]王立凯,冯喜增.微流控芯片技术在生命科学研究中的应用[J].化学进展,2005,17(3):482-497.Wang Likai,Feng Xizeng.Microfluidic network for research and application in life sciences[J].Progress in Chemistry,2005,17(3):482-497.(in Chinese)
[2]Stock D,Perisic O.Robotic nanolitre protein crystallisation at the M RC laboratory of molecular biology[J].Progress in Biophysics and Molecular Biology,2005,88:311-327.
[3]Dunn D A.Challenges and solutions to ultra-high-throughput screening assay miniaturization:submicroliter fluid handling[J].Drug Discovery Today,2000,5:84-91.
[4]Hazes B,Price L.A nanovolume crystallization robot that creates its crystallization screens on-the-fly[J].Acta Crystallographica Section D Biological Crystallography,2005,D61:1165-1171.
[5]Haber C,Boillat M,Bart van der Schoot.Flow sensor driven nanodispensing:the path to more reliable liquid handling operations[J].Amercian laboratory.2004,10:32-34.
[6]Felton M J.Liquid Handling: Dispensing Reliability[J].Today’s Chemist,2004,1: 51-54.
[7]Haber C,Boillat M,Bart van der Schoot.Precise nanoliter fluid handling system with integrated high-speed flow sensor[J].ASSAY and Drug Development Technologies.2005,2:203-212.
[8]何秀华,张睿,蒋权英.基于 M EM S的压电泵及其研究进展 [J].排灌机械,2007,25(4):64-68.He Xiuhua,Zhang Rui,Jiang Quanying.Progress on piezoelectric micropump based on M EM S[J].Drainage and Irrigation Machine.2007,25(4):64-68.(in Chinese)
[9]阚君武,杨志刚,程光明.压电泵的现状与发展 [J].光学精密工程,2002,10(6):619-623.Kan Junwu,Yang Zhigang,Cheng Guangming.Research on piezoelectric pump and its development[J].Optics and Precision Engineering,2002,10(6):619-623.(in Chinese)
[10]刘国君,程光明,杨志刚.一种压电式精密输液微泵的试验研究[J].光学 精密工程,2006,14(4):612-616.Liu Guojun,Cheng Guangming,Yang Zhigang.Experimental research on a piezoelectric micro-pump for precision pumping[J].Optics and Precision Engineering,2006,14(4):612-616(in Chinese)
[11]Mohamed G E H.The M EM S Hand Book[M].New York:CRC Press,2002.
[12]Gregort T,Kovacs A.Micromachined transducers sourcebook[M].New York:McGraw-Hill Press,1998.
