双馈发电系统的神经网络转速辨识*
2010-08-28喻明江
李 岚, 喻明江
(太原理工大学电气与动力工程学院,山西太原 030024)
0 引言
无速度传感器双馈发电系统转速的准确辨识对高性能的矢量控制非常重要。目前,双馈发电系统转速辨识常采用模型参考自适应系统(Model Reference Adaptive System,MRAS)。文献[1]以静止α-β两相坐标系转子磁链的电压模型作为参考模型、电流模型作为可调模型,仿真结果验证了所提策略的正确性;文献[2]利用小信号模型分析和设计了MRAS观测器,稳态和动态试验证明了所提方法的有效性。但是,MRAS在低速和动态情况下转速辨识精度会相应下降[3-4];另外,自适应控制是一种基于数学模型的控制方法,电机参数的时变性也会给转速辨识带来一定误差,影响系统的控制精度。
人工神经网络经过严格的训练后,具有对非线性系统进行辨识的能力,利用人工神经网络对双馈发电机转速进行辨识,能使神经网络较准确地反映电机转速。本文根据双馈发电机的数学模型,建立了基于MRAS的参考模型和可调模型,利用后项差分法推导了基于神经网络的MRAS可调模型,并用两层神经网络实现可调模型中的磁链运算,通过误差反传算法对两层神经网络进行训练,得出双馈发电机的辨识转速。对双馈发电系统进行了仿真,结果表明:基于神经网络的MRAS辨识转速能反映实际转速,且辨识精度得到了有效提高。
1 转速辨识模型
模型参考自适应系统的基本结构如图1所示。参考模型和可调模型(自适应模型)被相同的外部输入所激励,X和X^分别是参考模型和可调模型的状态矢量。参考模型用其状态X规定了一个给定的性能指标,该性能指标与测得的可调模型性能X^比较后,将其差值矢量e输入自适应机构,由自适应机构来修正可调模型的参数,使得其状态X^能够快速而稳定地逼近X,使差值趋于零[5]。

图1 MRAS基本结构
双馈发电机定子绕组采用发电机惯例、转子绕组采用电动机惯例的情况下,两相静止α-β坐标系下,电压、磁链基本方程为

式中:uαs、uβs,uαr、uβr——定、转子电压的 α、β 轴分量;
iαs、iβs,iαr、iβr——定、转子电流的 α、β 轴分量;
Ψαs、Ψβs,Ψαr、Ψβr——定、转子磁链的 α、β轴分量;
Rs、Rr——定、转子绕组电阻;
Ls、Lr——α、β 坐标系下两相定、转子绕组的自感;
Lm——α、β坐标系下同轴定、转子绕组间的等效互感;
ωr——转子角速度;
p——微分算子。
根据式(1)、(2),可得到两种形式的转子磁链模型:

式(3)不含辨识值,将其作为参考模型,由它表示的电机状态与实际相符,即转子磁链是准确的;式(4)含有辨识值ωr,将其作为可调模型,在该模型中,假定电机参数是不变的,ωr是可调参数,即需要辨识的参数,由可调模型可估计出转子磁链。
2 基于神经网络的转速辨识可调模型
将式(3)作为转速辨识参考模型,用一个神经网络来构造式(4)所表示的可调模型。
采用后项差分法对式(4)进行离散化处理,得到可调模型的离散化状态方程:
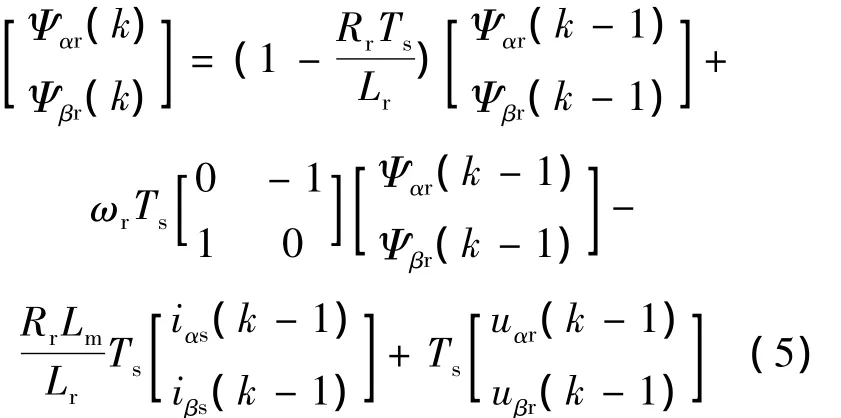
式中:Ts——采样周期;
k——步数。
因此,转子磁链的估计值为

式(6)可简化为如下形式:
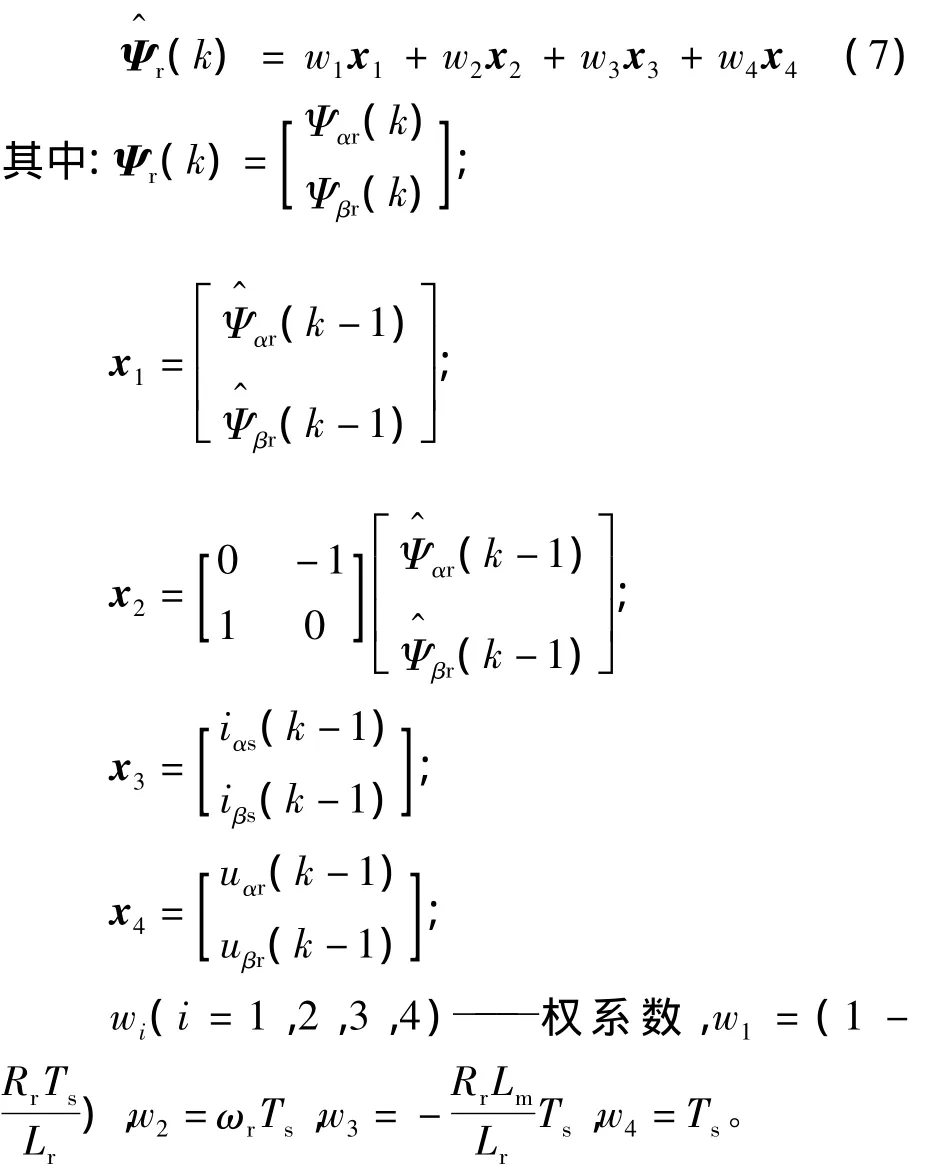
根据式(7),利用两层神经网络模型代替可调模型,如图2所示。四个输入节点分别代表转子电压、转子磁链及定子电流的过去值,输出是目前估计的转子磁链值,权值w2正比于转子转速。
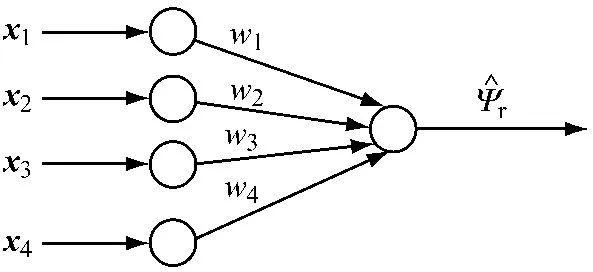
图2 神经网络表示的可调模型
参考模型输出与神经网络模型输出的偏差为

如果由可调模型估计的转子磁链与参考模型确定的相同,即e(k)=0,则转速估计值ω^r一定与实际值ωr一致;如果两者存在偏差,则说明转速估计值ω^r一定与实际值ωr不一致,此时利用神经网络进行权值调整,最终使转速估计值ω^r与实际值ωr相等。
定义误差函数:

权值变化:
将式(6)、(9)代入式(10),可得:
因为权值w2正比于ωr,又由:

可得转速辨识值:
3 双馈发电系统仿真
将基于神经网络的MRAS转速辨识方法应用于双馈发电系统。图3所示为基于定子磁场定向的双馈发电机励磁系统转子侧矢量控制原理框图。建立了相应的MATLAB仿真模型,重点对发电机转速特性进行仿真,并与基于MRAS辨识双馈发电系统的转速特性进行比较。
当发电机工作在亚同步、同步、超同步状态时,设定给定转速分别为=1 350 r/min、=1 500 r/min=1 700 r/min时,发电机转速仿真波形分别如图4、5、6所示。
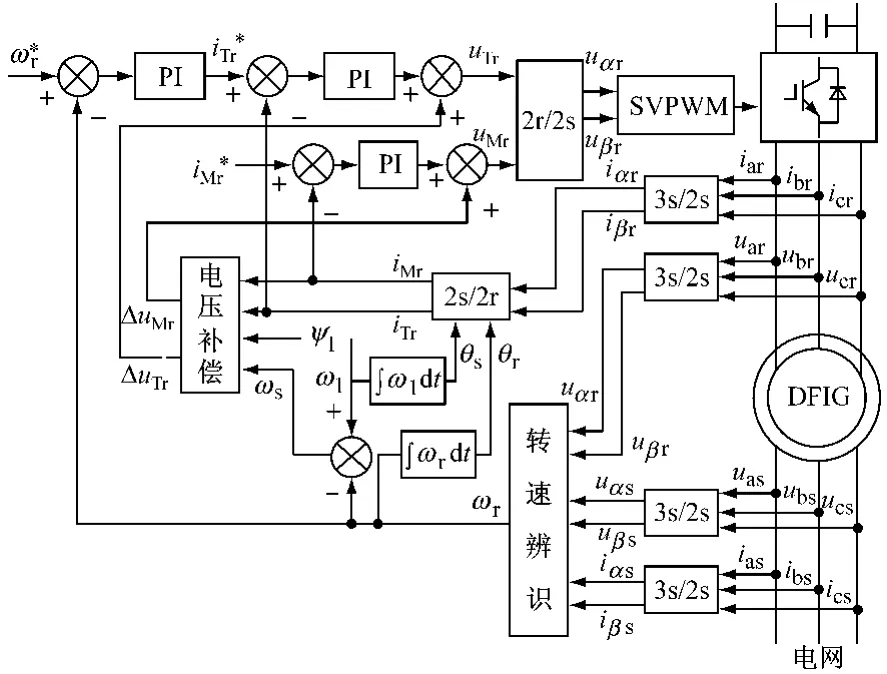
图3 双馈发电励磁系统
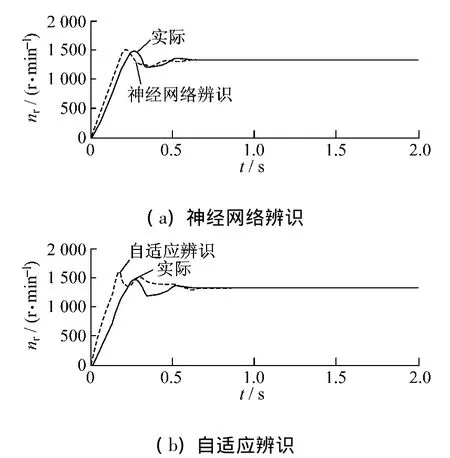
图4 n*r=1 350 r/min时转速波形
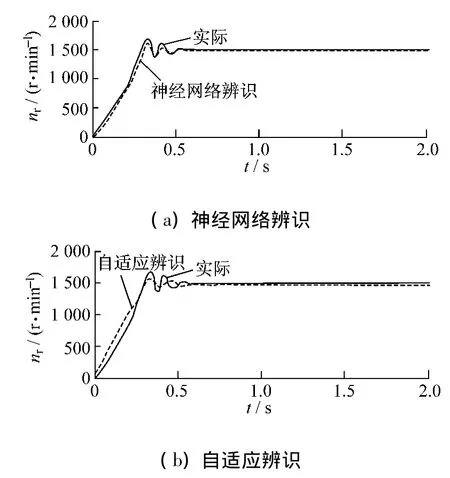
图5 n*r=1 500 r/min时转速波形

图6 n*r=1 700 r/min时转速波形
4 结语
从仿真结果可以看出:在起动过程中,基于神经网络的MRAS辨识转速与实际转速稍有偏差,但与基于MRAS辨识方法相比,偏差减小;进入稳态后,基于神经网络的MRAS辨识转速能够跟随实际转速,但MRAS辨识转速与实际转速之间存在一定的偏差。因此,采用基于神经网络的MRAS辨识双馈发电机系统转速,可以使转速辨识精度得到有效提高。
[1]秦涛,吕跃刚,肖运启,等.基于模型参考自适应的无速度传感器双馈风力发电机组控制技术研究[J].现代电力,2008,25(4):64-70.
[2]Roberto Cardena,Ruben Pena,Jose Proboste,et al.MRAS observer for sensorless control of standalone doubly fed induction generators[J].IEEE Trans on Energy Conversion ,2005,20(4):710-718.
[3]李楠,姚兴佳,邢作霞.双馈风力发电机无速度传感器矢量控制[J].可再生能源,2006(5):83-85.
[4]陈伯时,杨耕.无速度传感器高性能交流调速控制的三条思路及其发展建议[J].电气传动,2006,36(1):3-8.
[5]夏超英.交直流传动系统的自适应控制[M].北京:机械工业出版社,1998.