基于遗传神经网络的超声波电机转速控制系统
2010-08-28史敬灼
陈 欢, 史敬灼
(1.武汉船用电力推进装置研究所,湖北武汉 430064;2.河南科技大学,河南洛阳 471003)
0 引言
超声波电机(Ultrasonic Motor,USM)是一种新型特种电机,在工业控制、精密仪器、办公自动化等领域有着广阔的应用前景[1]。但是,USM具有严重的非线性、时变性和强耦合,数学建模非常困难,至今还没有精确的数学模型,传统的依赖被控对象数学模型的控制策略很难对其实施有效控制。将动态递归神经网络(Dynamical Recurrent Neural Networks,DRNN)应用于USM的自适应速度控制,弥补了上述方法的不足。采用混合递阶遗传算法对网络的结构和初始参数进行了离线优化,再通过梯度下降对网络参数进行在线调整。试验结果表明:该方法不仅具有控制灵活、适应性强的优点,还具有较高的控制精度和鲁棒性。
1 USM驱动控制系统
USM利用两相具有一定频率、幅值和相位差的正弦电压来驱动,但由于电机本身的呈容性,可以使用方波电压来直接驱动。本文采用调相调速方案,使驱动电压的相位差在-90°~+90°连续可调。选取DSP56F801内置的脉宽调制(Pulse Width Modulation,PWM)模块作为驱动信号发生器,通过修改PWM周期寄存器(PWMCM)和计数模值寄存器(PWMVAL)的值,即可实现驱动电压频率和相位差的调节。驱动信号经隔离放大后,由两相推挽逆变电路逆变、升压成两相高压、高频方波电压,驱动USM。为了补偿USM的谐振频率飘移,需对USM弧极反馈电压采样,将采样值与设定值进行比较,若小于设定值则减小PWMCM的值,若大于等于则保持不变,以跟踪谐振频率的漂移。为保证测速的精度,采用光电编码器作为测速单元,将其接定时器内部的正交解码单元即可实现转速及转角的测算。控制系统结构框图如图1所示。
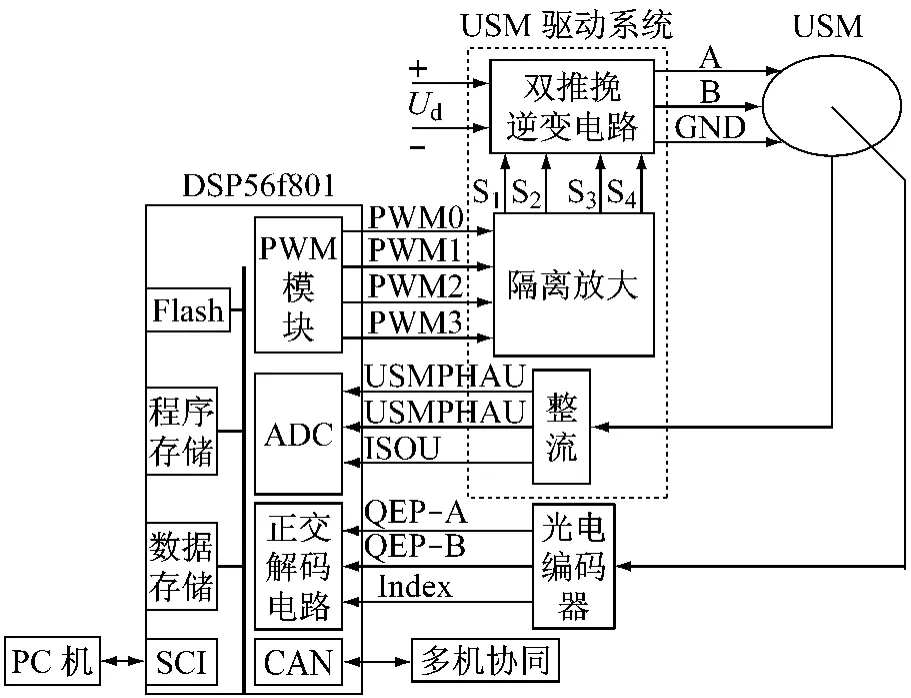
图1 控制系统结构框图
2 USM参数辨识自适应控制系统
由于DRNN能够实现高度复杂的非线性动态映射,又具有自学习、自适应的能力,故将其作为自适应控制器(DRNNC),其输入为给定转速r(k)、电机上一时刻实际转速y(k-1)及NNC上一时刻输出的控制量UP(k-1),输出为控制信号UP(k)用以调节两相驱动电压的相位差。用作参数辨识的辨识器(DRNNI)输入为实际输入USM的控制量UP(k)和电机上一时刻的实际转速y(k-1),输出为预测转速y*(k)。利用y*代替y,为DRNNC的在线训练提供参数。USM参数辨识自适应控制系统框图如图2所示。
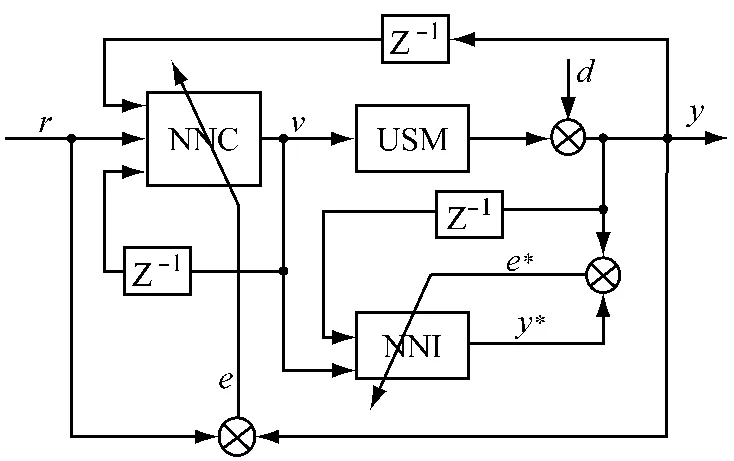
图2 USM参数辨识自适应控制系统框图
3 DRNN及其训练方法
DRNN结构如图3所示。它除了输入层、隐层、输出层外还有一个特殊的结构单元,用来记忆隐层单元以前时刻的输出值,结构单元在k时刻的输入等于隐层在k-1时刻的输出,但为了减少在线学习时间,提高实时性,结构单元的输出仅输入到相应的隐层单元。设网络输入向量为X,输入单元与隐层单元间的连接权值矩阵为W1,隐层单元与输出单元间的连接权值向量为W2,结构单元与隐层单元间的连接权值向量为W3,隐层激活函数为f(此处选为1/(1+e-x)),隐层第j个神经元输出为Hj,则网络的输入输出关系为
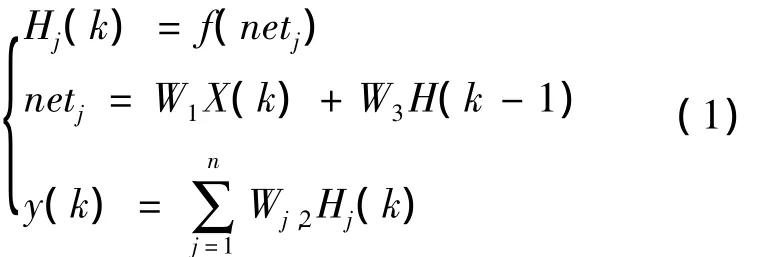
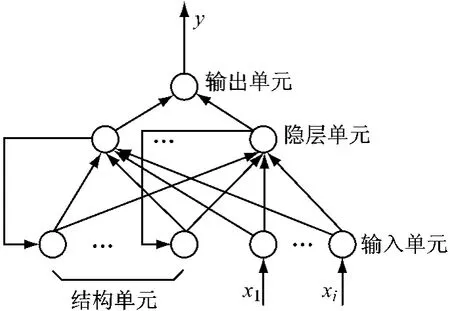
图3DRNN结构
3.1 离线训练
离线训练的样本均通过试验的方法获得。NNC的输入样本向量为Xci={r(k),y(k-1),Up(k-1)},输出样本矢量为Yci={Up(k)},Up(k)为输入USM的两相交流电压的相位差,可由k时刻电机转速通过查对应的转速相位差或转速电压幅值曲线获得。NNI的输入样本为向量XIi={Up(k-1),yf(k-1)},输 出 样 本 向 量 为YIi={y*(k)},y*(k)为预测转速。
传统的训练算法是在网络结构已知的基础上对网络参数进行寻优,无法对网络结构进行优化。本文采用混合递阶遗传算法对网络结构和参数一并优化,递阶遗传算法的寻优过程如下:
(1)编码。采用二级递阶染色体结构描述网络结构和参数,其中一级控制基因表示隐层节点,采用二进制编码,二级参数基因采用十进制编码。
(2)产生初始种群。
(3)适应度评价。选取与期望性能相关的、适当的适应度函数,以达到优化系统性能的目的。本文选为 2N/[(0.95+0.05em)∑(y*-y)2],N为样本数,m为激活神经元个数。
(4)选择。选择适应度较大的进行复制。
(5)交叉。按照交叉概率随机选取部分个体,对其进行随机配对,对配对的两个个体随机选择一个位置进行交叉操作。
(6)变异。按照变异概率随机选取部分个体,对被选个体随机选择一个位置进行变异操作。
(7)重复(3)~(6)直到获得最优解。
3.2 在线训练
在线训练采用的是梯度下降误差纠正法,对于NNI选定式(2)为整定指标:

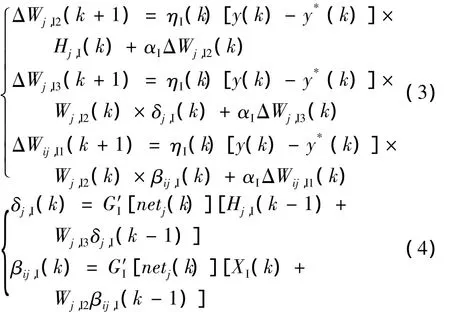
按照式(3)、(4)调节权值:
其中,G′I[netj(k)]=Hj,I(k)[1-Hj,I(k)],式(4)是随时间变化的非线性动态递归方程,可以通过已知初值条件:δj,I(0)=0,βij,I(0)=0,递推求得。
网络权值可按式W(k+1)=W(k)+ΔW(k+1)调整。其中,W分别表示NNI的权值W1,W2,W3;η(k)为自适应学习率;α 为动量因子;X(k)=[U(k),y(k-1)]。
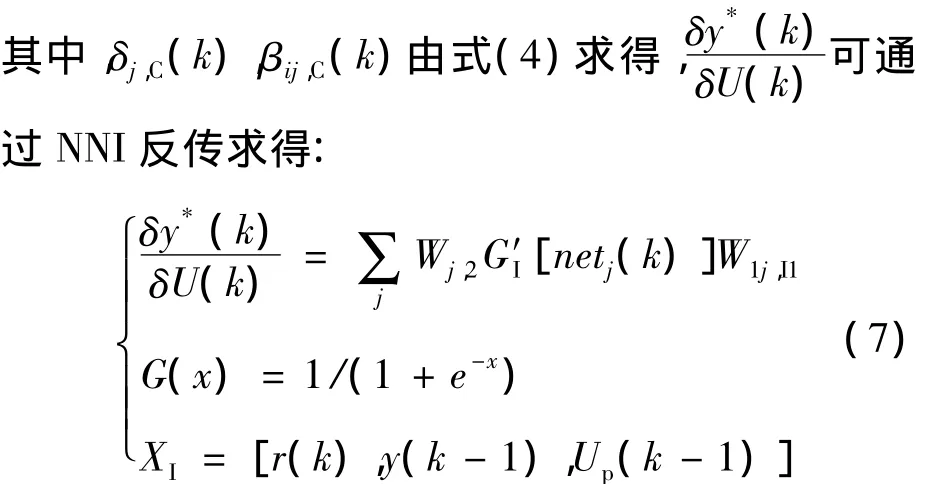
对于NNC,选定式(5)为整定指标:

按梯度下降法调节隐层和输出层之间的权值:

4 试验结果及分析
利用上述平台对新生公司Φ30行波型USM进行控制,径向基函数网络(Radial Basis Function Network,RBFN)的在线训练由 Freescale公司的56F801DSP完成。用于试验的USM技术参数如下:外径为30 mm,输入电压为12 V DC,额定功率为3 W。
图4显示了USM空载时给定转速阶跃变化时系统的跟踪结果。其中:图4(a)为USM的跟踪转速,图4(b)为转速跟踪误差。
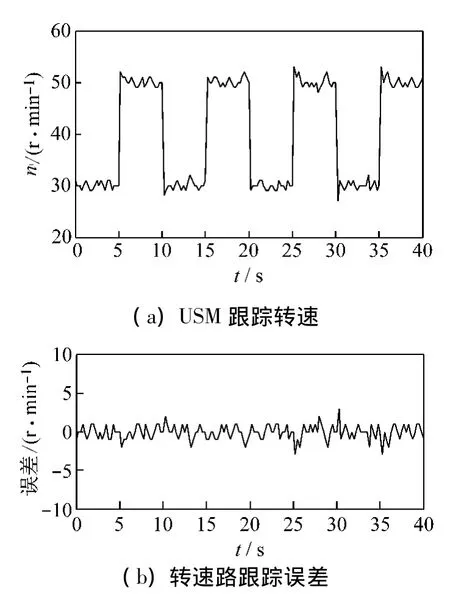
图4 USM空载时系统的阶跃响应跟踪
图5为USM转速稳定情况下,给系统施加阶跃负载时,系统的响应结果。其中:图5(a)为所施加的阶跃负载,图5(b)为USM跟踪阶跃负载转速跟踪结果,图5(c)为跟踪阶跃负载转速误差。
从图4可看出,系统能很快地响应给定转速的变化,有较好的跟踪能力和稳定性;由图5可知:系统有较强的抗外界干扰的能力,动态响应良好,具有较好的鲁棒性。
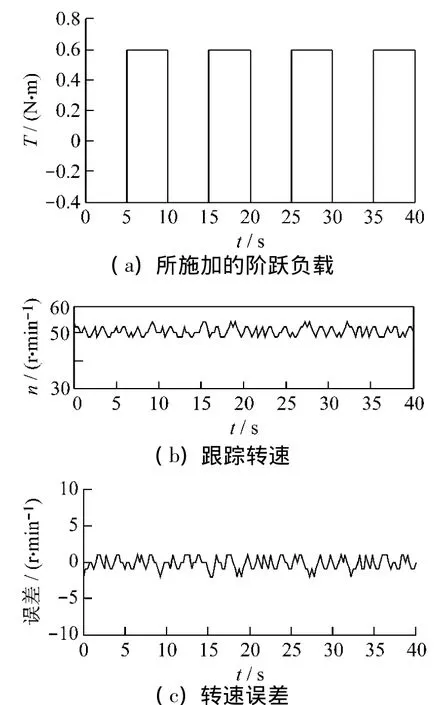
图5 USM带负载时系统的恒定转速跟踪
本文采用的方法不依赖于电机模型,在离线训练时对网络结构和初始参数进行了优化,使网络结构紧凑,而且避免了神经网络训练过程中陷入局部最小化的缺点,也加快了在线训练过程中网络的收敛速度,进而加快了系统的响应速度,增强了系统的适应性。
5 结语
在应用神经网络实现USM转速自适应控制时,运用混合递阶遗传算法离线对网络结构和参数一并进行了优化,从而使网络结构更趋合理,非线性函数逼近能力更强,收敛速度更快。试验证明,系统具有较好的稳定性和动态响应能力,可以达到较高的控制精度。
[1]夏长亮,徐绍辉,史娟娜,等.基于遗传算法的超声波电机模糊自适应速度控制[J].中国电机工程学报,2003(3):99-103.
[2]金龙,褚国伟,王心坚,等.基于DSP的超声波电机控制系统[J].电工技术学报,2004(8):1-4.
[3]夏长亮,祁温雅,杨荣,等.基于RBF神经网络的超声波电机参数辨识与模型参考自适应控制[J].中国电机工程学报,2004(7):117-121.
[4]陈维山,方艳,谢涛,等.基于DSP的行波型超声波电机的驱动与控制[J].机械工程师,2005(8):2-3.