四开关三相永磁同步电机磁场定向控制系统
2010-08-28王晓丹郭希铮
王晓丹, 李 端, 郭希铮
(1.河南理工大学电气工程与自动化学院,河南焦作 454001;
2.北京交通大学电气工程学院,北京 100044)
0 引言
20世纪70年代初,文献[1]提出异步电机磁场定向的控制原理,该方法以其控制简单、鲁棒性好,以及快速的动态性能被广泛研究。永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)具有功率密度高、效率高、低速大转矩及调速范围宽等优点,在电动汽车、舰船驱动领域有着广阔的应用前景[2]。磁场定向控制(Field Oriented Control,FOC)方法以其优良的性能也得到了广泛应用。
传统PMSM的FOC系统中,采用三相六开关逆变器(Six-Switch Three-Phase Inverter,SSTPI)供电。但是,由于电力电子器件是系统最为脆弱的一部分,因此当其出现故障时,如何采取相应的应对措施是学者研究的热点[3]。通常的解决方法有两种:第一种是采用开关器件冗余方法;第二种是实施四开关三相运行[4-6]。第一种方法会增加系统硬件成本,而第二种方法是低成本的选择,且当其单独应用于PMSM的FOC系统时,可以降低系统成本,并简化系统拓扑结构。
四开关三相逆变器(Four Switch Three Phase Inverter,FSTPI)只有4个开关器件,与 SSTPI相比,只有4个开关矢量,并且没有零矢量,其空间矢量脉宽调制方法(Space Vector Pulse Width Modulation,SVPWM)是应重点研究的问题[7]。本文以四开关三相PMSM的FOC系统为研究对象,首先分析了FSTPI空间矢量调制方法,其次分析了PMSM的FOC原理,并以此为基础建立了系统的控制模型。分析结果表明:四开关三相PMSM的FOC系统可以稳定运行,并且具有较好的转矩动态响应性能。
1 FSTPI空间矢量调制
四开关三相PMSM系统拓扑如图1所示。与采用传统SSTPI系统不同,FSTPI节省了1个桥臂,即节省了2只大功率全控开关器件,直流侧增加了1只电容,但是电容耐压值为SSTPI的1/2。

图1 FSTPI-PMSM系统拓扑结构图
1.1 电压矢量表
定义Sa、Sb为开关变量,其中:Sa=1时表示A相上桥臂T1导通;Sa=0时表示A相下桥臂T3导通。因此,FSTPI共有22=4种开关状态,每种开关状态对应一定的三相电压瞬时值。相对于SSTPI具有8个电压矢量(6个有效电压矢量,2个零矢量),FSTPI开关矢量的分布还与负载连接方式有关,对于PMSM的FOC系统来说,相当于星型负载连接。FSTPI-PMSM电压开关矢量表如表1所示,图2是其空间分布。
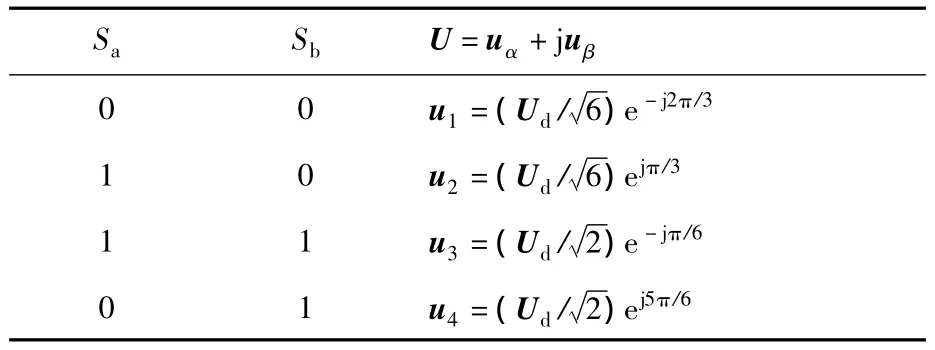
表1 FSTPI电压开关矢量表

图2 FSTPI-PMSM系统开关矢量分布
上述开关矢量有如下特点:
(1)开关矢量幅值不同,|u2|=|u1|;
(2)不存在零矢量;
(3)只有4个开关矢量可以利用,控制自由度降低。
1.2 FSTPI空间矢量调制算法
设u*为合成的电压矢量,根据脉冲等量原则:合成矢量与时间的乘积等于四个基本矢量与相应时间乘积之和,存在如下关系:

Ts为开关周期,t1、t2、t3、t4满足式(2):

u*在静止坐标系时表示为u*=uα*+juβ
*,
且FSTPI开关矢量存在以下关系:

可以得到式(3):

其中:t13=t1-t3,t24=t2-t4。
由式(3)可以得到:

其中:u1α=-Ud/12,u1β=-Ud/4,u2α=Ud/4,u2β=-Ud/4。由式(4)可以得到:

由上文分析可知,结合式(2)、(5)无法求解t1、t2、t3、t4,且 FSTPI不存在零矢量,根据式(3)推得零矢量的作用时间为

由图 2 可以看到,u1=-u3,u2=-u4,那么零矢量可以等效为以下3种方式:
(1)u1,u3同时作用,如图3(a)所示;
(2)u2,u4同时作用,如图3(b)所示;
(3)将零矢量分为kδT和(1-k)δT(0≤k≤1)两部分,即u1,u3和 u2,u4共同作用,如图3(c)所示;此时,计算得到的t1、t2、t3、t4如表2 所示。
由表2可以看出:当k=1时,即选择矢量u1、u3共同作用等效为零矢量;当k=0时,即选择矢量u2、u4共同作用等效为零矢量。由表2计算得到的t1、t2、t3、t4满足式(2)、(5)。

图3 FSTPI零矢量的选择方式

表2 FSTPI不同扇区各矢量作用分布表
1.3 矢量切换顺序
在SSTPI空间矢量算法中,通过插入零矢量,在不同扇区通过合理的选择矢量开关顺序,保证每次电路拓扑结构三个桥臂中只有一个桥臂的开关状态发生变化,从而减少开关损耗。以第一扇区为例,选择开关矢量u1(001),u2(011),那么其矢量切换顺序为u0(000)—u1(001)—u2(011)—u7(111)—u2(011)—u1(001)—u0(000)。
这里所遵循的原则是每次切换时只有一个开关状态发生变化。因此,在FSTPI中满足此原则的矢量切换顺序如图4所示。
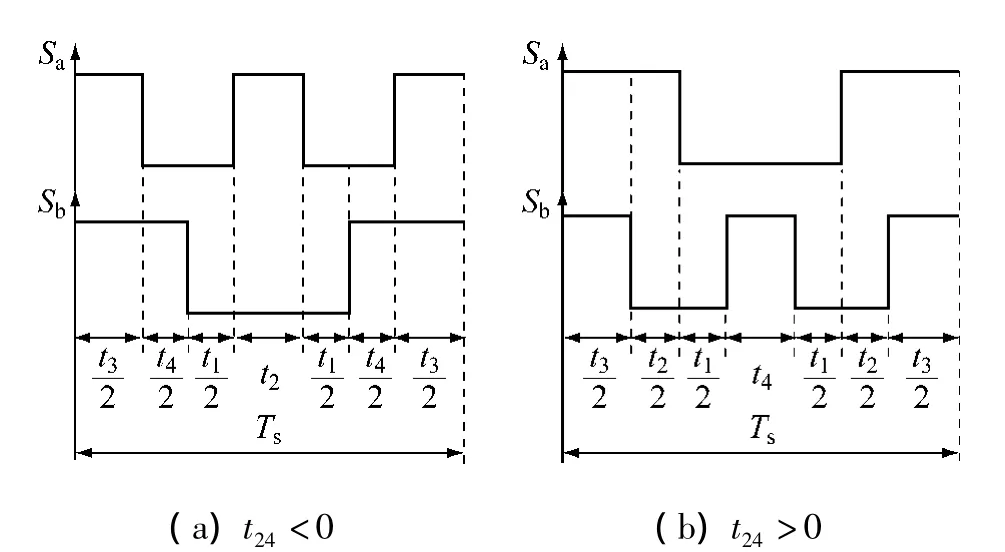
图4 矢量切换顺序
2 四开关三相PMSM的FOC系统实现
PMSM在同步旋转坐标系下的dq轴数学模型[1]如下。
(1)电压方程:


式中:p——微分算子;
Rs——定子电阻;
Ld、Lq——d、q轴等效电感;
P——电机极对数;
Ψm——转子固有磁链。根据上述模型,四开关三相系统控制框图如图5所示。图中:Is*为根据转矩指令查表获取的电流指定,通过MTPA曲线[9]得到d、q轴电流指令idr
*、iqr
*,电流指令与反馈相比较经过PI调节
对于FSTPI或SSTPI来说,其输出电压范围是一定的。当PMSM转速升高时,其转子反电势由永磁体产生而无法调节,电机定子电压会超过逆变器最大输出电压uslim限制。图5中将uslim与参考电压幅值us比较后通过单向PI调节器产生弱磁电流分量Δidr,使得逆变器输出最大线电压并保持不变。
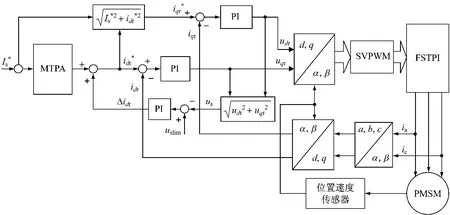
图5 四开关三相PMSM的FOC系统控制框图
3 仿真研究
为了研究FSTPI-PMSM的FOC系统性能,对图5所示系统建模,并采用MATLAB进行仿真研究,其中SVPWM部分采用S_function建模。仿真参数设置如下。
(1)永磁电机:Rs=0.107 Ω,Ld=Lq=2.5 mH,Ψf=0.175,P=4;
(2)逆变器:C1=C2=3 300e-6 μF,Ud=330 V,fsw=10 kHz;
图 6(a),(b),(c)比较了k=0,0.5,1 时,FSTPI-PMSM的FOC系统仿真结果,其中转矩给定为20 N·m,电机转速为320 r/min。图6表明:选取不同的k值时,系统均能稳定运行;但是,k=0.5时的电流波形正弦性和转矩脉动情况要明显优于其他两种情况;k=0时,转矩脉动最大,电流波形中的谐波分量加大。图6(d)为SSTPIPMSM系统仿真结果,相对于图6(b),其电流波形光滑,谐波分量减小,转矩脉动降低。这表明,在减少系统成本和提高系统性能之间存在折中。
图7为FSTPI-PMSM的FOC系统转矩响应曲线,0.3 s时转矩指令突增为30 N·m,0.35 s时转矩突降为15 N·m,可以看到,电机输出电磁转矩能够快速响应转矩指令变化,保持了FOC系统转矩动态响应快的特点。
在FSTPI中采用SVPWM算法时,其零矢量是将两个位置互差180°的矢量同时作用来等效的。该方法所带来的直接影响使得逆变器直流侧的两支电容电压产生波动,如图8所示,可以通过增加直流侧电容值来增加电容储能能量,从而减小电压波动幅值。
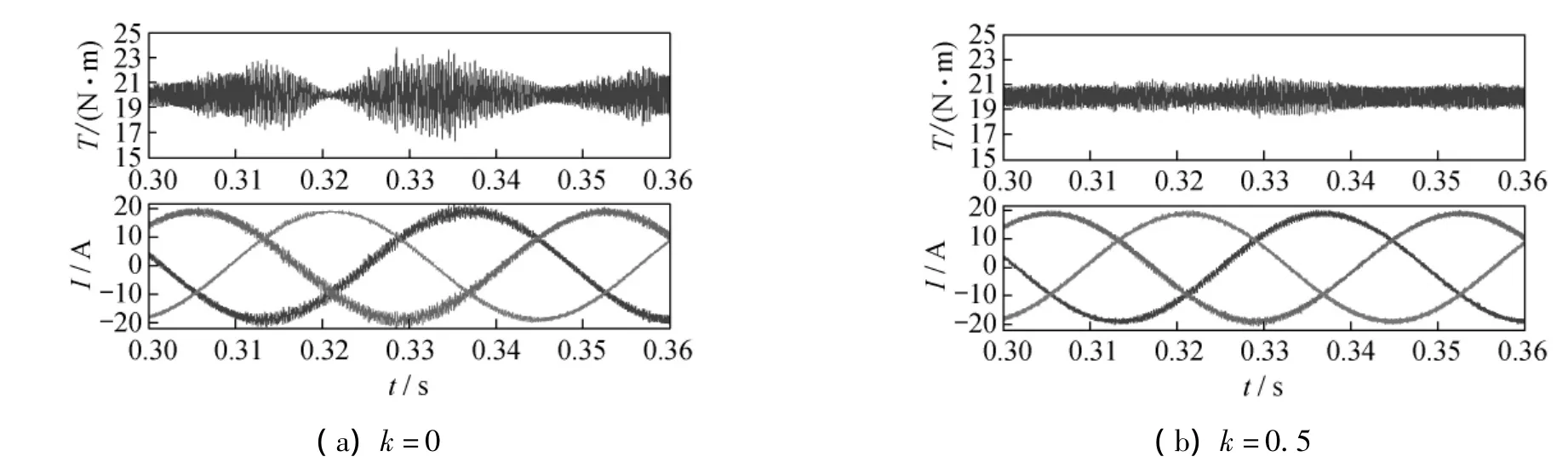
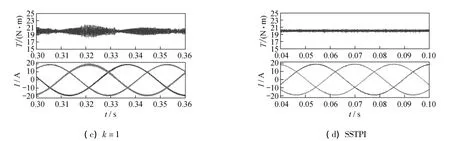
图6 FSTPI-PMSM的FOC系统仿真结果
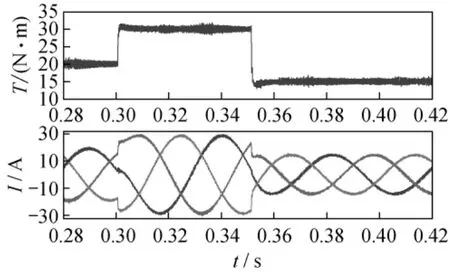
图7 FSTPI-PMSM的FOC系统转矩响应曲线

图8 FSTPI直流侧电容电压波形
4 结语
本文将FSTPI应用于三相PMSM的FOC系统,针对其仅有4个有效电压矢量,采用通过两个互差180°的电压矢量叠加等效的方法产生零矢量作用。通过对三种SVPWM策略进行仿真研究,结果表明:
(1)k=0.5时,即采用4个电压矢量同时作用等效零矢量时,电机电流波形、转矩脉动均得到了改善。
(2)FSTPI-PMSM的FOC系统保持了FOC系统转矩动态响应快的特点,是一种具有实用前景的控制拓扑结构。
[1]Blaschke F.The principles of field orientation as applied to the new RANSVEKTOR closed-loop control system for rotating field machines[J].Siemens Review,1972:217-220.
[2]金能强,何洪涛.稀土永磁电机的应用和发展状况[J].电工电能新技术,1995(3):17-21.
[3]Kastha D,Bose B K.Investigation of fault modes of voltage-fed inverter system for induction motor drive[J].IEEE Transactions on Industry Applications,1994,30(4):1028-1038.
[4]Salazar L,Vasquez F C,Wiechmann E.On the characteristics of a PWM AC controller using four switches[J].PESC’93,1993:307-313.
[5]Jacobina C B.Vector and scalar control of a four switch three phase inverter[J].IAS,1990(5):2422-2429.
[6]Lee Hong Hee,Dzung P Q.The development of space vector PWM for four switch three phase inverter fed induction motor with DC-link voltage imbalance[J].ICIT,2009:1-6.
[7]Beltrao De Rossiter Correa.A general PWM strategy for four-switch three-phase inverters[J].IEEE Transactions on Power Electronics,2006,21(6):1618-1627.
[8]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[9]Hu Jun,Wu Bin.New integration algorithms for estimating motor flux over a wide speed range[J].IEEE Transactions on Powe Electronics,2006,13(5):969-977.