基于表面阵列电极的指力相关指浅屈肌活动模式检测
2010-08-13侯文生杨丹丹吴小鹰郑小林
安 媛 侯文生 杨丹丹 吴小鹰 郑小林
(生物流变科学与技术教育部重点实验室(重庆大学),重庆大学生物工程学院,重庆 400044)
引言
人手指的灵巧活动能力是人类区别于其他灵长类动物的重要特征,依靠手内肌和手外肌的共同控制,使手指间既相互独立又协同配合。手指力量的输出主要受指浅屈肌(flexor digitorum sublimis,FDS)、指深屈肌(flexor digitorum profundus,FDP)的共同作用,其肌束下移为四条肌腱进入第2~5指的屈肌腱鞘,控制人手第2~5指的指骨间关节各种运动,肌腹分化为与四条肌腱相对应的四个相对独立的功能分区[1]。研究多腱外在肌肉对手指活动模式的调控机制,对运动科学研究具有重要的学术意义,并在人机交互、假肢控制、人体工效学和康复训练等领域有显著的应用价值[2]。
Bhadra等在较早时期发现,人类指浅屈肌和指深屈肌虽然具有细化肌肉的各种特征,但它们并不是由四个完全独立的手指成分构成,对于每个手指的控制模式不同[3]。国内外各研究小组采用不同的研究手段,对手指动作与前臂肌肉的相关性进行了探索。Kursa等采用植入肌肉的力量传感器,研究肌肉力量与手指力量的相关性,发现FDS四个功能分区并不是完全独立控制相应手指活动[4]。Butler等采用针电极记录单个运动单位活动,从神经肌肉控制角度研究手指协同动作,结果发现FDS神经肌肉功能单位能够根据人的意识激活[5]。清华大学采用双电极结构采集前臂肌肉表面肌电(surface electromyography,sEMG)信号,识别拇指伸、拇指屈、拇指食指松开、拇指食指对捏、平掌和强力抓取6种手指活动模式,实现手指运动模式识别系统开发[6]。本课题组利用双电极结构采集前臂肌肉sEMG信号,在频域范围内对其进行分析,研究发现sEMG信号最大功率谱可作为表征手指活动模式的参数[7]。
虽然sEMG信号检测手段克服了针电极和力量传感器的有创,但传统的双电极sEMG只能记录一块肌肉的运动单元综合电活动,不能提供肌肉不同空间位置的电活动信息。近年来出现了一种基于阵列电极的sEMG信号检测方法,它可以通过同时记录肌肉表面多个空间位置的电活动,以获取肌肉电活动的空间分布特征[8]。Barandun等利用阵列电极采集拇短展肌sEMG信号和拇指力量,估计评价拇短展肌疲劳前期拇指力量和sEMG信号的变化[9]。香港大学采用阵列电极采集腰部肌肉sEMG信号,引入 sEMG信号均方根(root mean square,RMS)二维彩色地形图,实现实时估计评价腰部肌肉活动[10]。鉴于多腱肌存在空间位置相对独立的功能分区,而阵列电极为检测肌肉不同解剖位置的电活动提供了技术可能,本研究采用阵列电极记录前臂肌肉FDS的sEMG信号,提取sEMG信号特征值RMS,分析其与食指力量水平的相关性,研究FDS不同解剖位置处运动单位的募集情况。
1 方法
1.1 实验对象和实验过程
本实验对象为8名大学生志愿者,其中男性4名,女性4名,受试者年龄在20~24岁之间,身体健康,实验前两天没有进行高强度运动,实验前6个月上肢没有出现扭伤、运动损伤、断裂等影响运动功能的伤病,没有运动神经类疾病,实验开始前受试者签署知情同意书。
测试中受试者保持坐姿,保证身体在测试过程中不移动,用尼龙带将测试腕部和前臂固定在搁板上,受试者掌心向下,拇指内收,1~4指微屈,轻放于传感器上,按要求依次完成6、8、10、12 N等4个力量水平的单指力量跟踪实验。实验过程中,为受试者提供目标力量曲线,并实时反馈实际指力的大小,使其尽力模仿目标线完成任务。以完成一轮6、8、10、12 N的力量跟踪实验为一组,重复5组,每组间隔1 min。实验前,每个受试者有熟悉实验过程的训练环节。为避免实验中受试者产生适应性,测试中完成任务的顺序是随机的。
实验采用表面阵列电极和RM6280C多道生理参数记录仪记录前臂指浅屈肌(FDS)表面肌电信号及力量传感器的输出电压,其中电极是直径为1.2 mm镀金圆电极组成的6×2(行×列)电极阵列,各电极中心距为3 mm,沿肌纤维方向贴于前臂指浅屈肌肌腹处,记录仪信号采样率设为2000 Hz。为保证电极记录效果,需要对受试者待测部位皮肤进行处理,用磨砂膏及75%酒精去除角质及皮脂。
1.2 数据处理
由于sEMG信号的时域特征值易于提取且性能稳定,实验中采用在时域范围内对sEMG信号进行分析。
作为传统的表征肌电信号特征的方法,均方根(root mean square,RMS)描述了一段时间内sEMG信号的平均变化特征,与手指力量表现出明显的相关性,可反应肌肉的活动状态,用于检测肌肉运动单位募集情况以及动作电位的大小,定义为所有数据点的平方和除以数据点数后开平方的结果,定义为[11]

式中,M为sEMG信号时间序列S(n)的长度。
根据生理记录仪6280记录软件中的标定结果,将指力传感器的输出电压转换为力量曲线,选择长度为1 s且在目标力量±0.25N%范围内波动的力量平稳段,将该段sEMG信号用于分析。原始sEMG信号中存在噪声干扰,且其频率范围介于20~500 Hz,需对其进行滤波处理。在Matlab7.0中,用椭圆滤波器对原始sEMG信号进行带通滤波。
计算各通道滤波处理后sEMG信号RMS值。首先以500点为一个时间窗,窗不重叠,将经过滤波处理的2000点的sEMG信号分成4段,用式(1)分别计算每段的RMS值,然后计算这4段sEMG信号RMS的均值 aveR、aveI,将 aveR、aveI作为这 2000点sEMG信号的RMS值。
2 结果
根据2.2中计算sEMG信号RMS的方法,计算出每个受试者所有动作的RMS值,然后对每一力量水平下重复5次的特征值数据取平均,以尽量避免随机因素的影响。图1显示了各通道sEMG信号RMS值在不同力量水平下的幅值变化。

图1 各通道sEMG信号RMS值随力量水平变化Fig.1 The variation of RMS of all channel sEMG signal with the variation of index force level
由图1可知,不考虑不同FDS解剖位置的影响,所有通道的sEMG信号RMS均随力量水平的增加而增加。
同时,电极在FDS不同空间解剖位置记录到的sEMG信号RMS幅值不同。各通道记录到的sEMG信号RMS幅值大小差异性较大,表1和表2给出了各通道sEMG信号RMS值的均值与标准差以及方差,可观察到通道2和通道5的RMS幅值均值和标准差以及方差均较其他通道大。
表1 各力量水平下各通道sEMG信号RMS(μV)()Tab.1 The RMS of all channel sEMG signal at four force level()

表1 各力量水平下各通道sEMG信号RMS(μV)()Tab.1 The RMS of all channel sEMG signal at four force level()
力量水平/N通道5 1.1538 ±0.1566 1.3813 ±0.2281 1.11 ±0.113981.1644 ±0.2029 1.4577 ±0.4181 0.8416 ±0.0928 1.2087 ±0.1706 1.4968 ±0.2709 1.1652 ±0.116610 1.228 ±0.2952 1.6569 ±0.5678 0.8892 ±0.1375 1.2644 ±0.2055 1.6422 ±0.3857 1.2239 ±0.155812 1.3314 ±0.2989 1.8199 ±0.6752 0.9374 ±0.1573 1.3272 ±0.2506 1.8116 ±0.4636 1.2969 ±0.2035 ch1 ch2 ch3 ch4 ch5 ch661.0963 ±0.1647 1.3354 ±0.3479 0.7931 ±0.096

表2 各通道sEMG信号RMS与力量水平的线性回归模型斜率Tab.2 The scopes of the linear regression model for the RMS and force level
在相同的力量水平下,研究了电极点位置对记录到的sEMG信号活动的影响,单因素方差分析表明电极点位置对sEMG信号RMS的影响为主效应(P<0.001)。对各通道RMS进行单因素方差分析,结果表明,除了通道1和通道4、通道1和通道6、通道4和通道6、通道2和通道5外,其他任何两个通道间RMS均具有显著性差异(P<0.05)。
图2显示了不同电极点位置记录的sEMG信号RMS随力量水平变化的变化曲线,可知,在食指活动模式下,通道2记录的sEMG信号对力量变化最敏感,通道5次之,其余四个通道RMS对力量敏感度较差。这一现象在表3RMS对力量变化的灵敏度中进一步被证实(P<0.001),通道2和通道5的RMS对力量水平的灵敏度几乎为其他通道的两倍。

图2 各通道sEMG信号RMS随力量水平变化曲线Fig.2 The variation curve of RMS of all channel sEMG signal with the increase of index force level
3 讨论
3.1 各通道sEMG信号RMS随力量水平增加呈现递增趋势
通过图1观察发现,不同电极点位置记录到的sEMG信号RMS均随力量水平的增加而增加。Reiners等用针电极观察到肌肉运动单位的发放率均随肌肉力量的增加而呈现递增趋势,当肌肉收缩力量较小时,低阈值的运动单位被募集,其发放率较低,产生的动作电位较小;当肌肉收缩力量较大时,阈值较高的运动单位被募集,高阈值运动单位发放率更快,也较不规则,电极测得的动作电位较大[12]。另外,以传统双电极结构也记录到sEMG信号的幅度(RMS)随力量增加而增加的变化趋势[13],这说明随力量水平增加而募集的高阈值、高发放率的运动单元的电活动通过肌肉组织和皮肤的传导与综合,也显著地表现为sEMG信号幅值的增加;而本研究通过阵列电极采集二维sEMG信号进一步证实,与力量水平相关的运动单元募集模式及其电活动水平还体现在肌肉表面不同解剖位置的电活动强度变化,即随肌肉收缩力量的增加,肌肉表面不同解剖位置的sEMG幅值将同步增强。
3.2 FDS不同空间解剖结构处RMS存在差异
从图2中可以观察到,相同力量水平下,FDS不同空间解剖结构处电极记录到的sEMG信号RMS差异性较大。图3给出了实验中阵列电极放置于指浅屈肌的示意图,表1中为各通道sEMG信号RMS的均值和方差,实验结果与先前Travis[14]的报道相符,当肌肉以一定力量收缩时,相应的运动单位发生募集,动作电位由神经支配区域沿肌纤维向两侧传输,神经支配区域和肌腱附近的动作电位较低,而处于中间区域的动作电位相对较大。
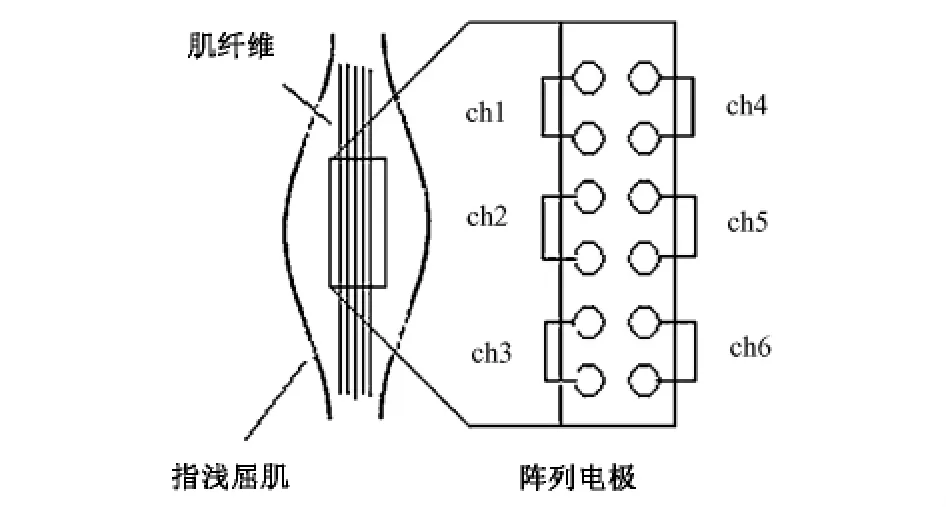
图3 阵列电极放置位置示意Fig.3 The schematic diagram of the placement location of electrode array
各通道RMS的显著性差异表明,FDS不同空间解剖位置处运动单位募集程度不同,不同解剖位置激活强度存在差异,即FDS不同解剖位置参与手指力量控制模式程度不同,放电模式不均衡。Reilly和Schieber利用针电极记录屈手指时指深屈肌(FDP)的电活动时发现,FDP中存在与手指高度相关的功能区域,不同手指所对应的功能分区处肌电活动强度不同,而且存在支配单指的较高核心选择区域[15];而本研究采用阵列电极检测到食指不同力量水平下,FDS不同解剖位置肌电活动也存在差异,这表明FDS同一功能分区不同解剖位置在手指控制模式中担任的角色不一样,其对运动单位的募集具有空间选择性。
4 结论
本研究利用阵列电极,在食指单指力量输出实验中,多点采集FDS高密度sEMG信号,提取sEMG信号RMS,分析其随力量水平的变化情况。研究结果表明,RMS幅值随手指力量水平的增加呈现出递增趋势,可作为sEMG信号的特征值,用于反映肌肉活动水平;FDS不仅存在不同的功能分区,对于同一功能分区,不同解剖位置参与手指活动控制程度不同。本研究虽然是小样本量的探索研究,但证实了阵列电极可用于检测FDS肌电活动的空间信息,估计FDS的空间激活特性及对手指的控制模式,为进一步研究前臂肌肉的空间活动模式提供技术支持。
[1]Schieber MH,Santello M.Hand function:Neural control and peripheral limits to performance [J].Appl Physiol,2004,96:2293-2300.
[2]Staude nmann D,Kingma I,Daffertshofer A,et al.Improving EMG-based muscle force estimation by using a high-density EMG grid and principal component analysis [A].In: IEEE.Transactions on Biomedical Engineering[C],New York: IEEE Professional Technical Group on Bio-Medical Engineering,2006,53(4):712-719.
[3]Bhadra N,Keith MW,Peckham PH.Variations in innervation of the flexor digitorum profundus muscle[J].J Hand Surg Am,1999,24:700-703.
[4]Katarzyna Kursa,Edward Diao,Lisa Lattanza,et al.In vivo forces generated by finger flexor muscles do not depend on the rate of fingertip loading during an isometric task [J].Journal of Biomechanics,2005,38: 2288-2293.
[5]Butler TJ,Kilbreath SL,Gorman RB,et al.Selective recruitment of single motor units in human flexor digitorum superficialis muscle during flexion of individual fingers[J].Journal of physiology-London,2005,567(1):301-309.
[6]王人成,郑双喜,蔡付,等.基于表面肌电信号的手指运动模式识别系统 [J].Chinese Journal of Rehabilitation Medicine,2008,23: 5.
[7]Hou Wensheng,Wu Xiaoying,Zheng Jun,et al.Characterization of finger isometric force production with maximum power of surface electromyography [J]. Biomedical engineeringapplications basis communications,2009,21(3): 193-199.
[8]Schwartz FP,da Rocha AF,dos Santos I.Surface EMG and spatialresolution analysis with estimation of electromyographic descriptors[A].In: IEEE.200830th Annual International Conference of the IEEE EMBS[C].Vancouver: IEEE,2008.8: 4748-4751.
[9]Barandun M,von Tscharner V,Meuli-Simmen C,et al.Frequency and conduction velocity analysis of the abductor pollicis brevis muscle during early fatigue[J].Journal of Electromyography and Kinesiology,2009,19(1): 65-74.
[10]Hu Yong,Siu Stanley HF,Mak Joseph NF,et al.Lumbar muscle electromyographic dynamic topography during flexion-extension[J].Journal of Electrmyography and Kinesiology,2010,20(2):246-255.
[11]胡晓,王志中,任小梅.小波变换和非线性分析在表面肌电信号中的应用及进展[J].北京生物医学工程,2006,25(1):105-108.
[12]Reiners K.Electromyographic Studies in Myopathies [J].Aktuelle Neurologie,2009,36(5):227-233.
[13]Kallenberg LAC,Hermens HJ.Behaviour of a surface EMG based measure for motor control:Motor unit action potential rate in relation to force and muscle fatigue [J].Journal of Electromyography and Kinesiology,2008,18(5): 780-788.
[14]Beck TW,Housh TJ,Cramer JT,et al.The effects of electrode placement and innervation zone location on the electromyographic amplitude and mean power frequency versus isometric torque relationships for the vastus lateralis muscle [J].Journal of Electromyography and Kinesiology,2008,18(2): 317-328.
[15]Reilly KT,Schieber MH.Incomplete functional subdivision of the human multitendoned finger muscle flexor digitorum profundus:an electromyographic study [J].Journal of Physiology,2003,90(4):2560-2570.
