多源航迹相关准则探讨
2010-06-28吴小强
史 鉴 ,吴小强
(1.船舶重工集团公司723 所,扬州225001 ;2.海军驻扬州723 所军事代表室,扬州225001)
1 概 述
应用2 部或2 部以上的空间位置互相分离而覆盖范围互有重叠的雷达对目标实施探测时,便构成了雷达网。多部雷达、通讯设备、信息处理设备、控制设备等相互连接,对各部雷达实行一定的统一控制和管理,并对网内各部雷达获取的信息形成网状收集与传递、综合显示、综合处理,从而就形成一个统一的有机整体——雷达网系统。多部雷达组成雷达网系统协同作战,能发挥其更大的优势。雷达网系统较之单站雷达有以下特点和优势:扩展探测的覆盖空间和时间,提高雷达观测数据率;在重叠的探测区域内,系统灵敏度能够提高;具有反隐身能力;综合抗干扰的性能强;系统跟踪目标的能力、测量精度得到改善和提高。
雷达组网设计需要考虑组网雷达的优化配置选择和布站方式,雷达和控制设备之间的时间同步、数据传输、数据融合以及组网雷达之间的整合控制、管理调度和电磁兼容等问题。而多源信息数据融合是雷达组网不可或缺的关键技术之一,数据融合技术指对来自多传感器的原始数据和信息进行分类、互联、估计与综合,以得到目标状态,提取有利于做出决策的信息,其目的是获得一种综合信息。大致可分为信息提取、数据传输、信息分类、时空对准、航迹相关、数据综合等几个过程。
本文讨论的是两坐标搜索雷达组网航迹分布式处理方式下,每个传感器用自身获得的数据形成目标航迹,将各航迹信息和相关信息提交给数据融合中心(DFC)作融合处理,形成雷达系统目标航迹;多传感器探测数据的时空校准后,由于同一目标同时受到多部雷达的照射,各部雷达因为观测角度、观测误差和观测时机的不同,对该目标观测的批号和观测值有所差别。多源航迹相关就是将来自多传感器的各不相同的航迹统一到融合中心的时间空间基准上后,对数据进行分析比对,确定多条航迹是否为同一目标的技术。
2 航迹相关需要的信息
各个雷达输出的航迹信息一般包括目标的方位、距离、相对或绝对运动速度和运动方向(也称为目标航速、目标航向)、航迹质量、航迹时辍、航迹丢失或新建航迹标志等,这是航迹相关的基本数据。
设计多源雷达航迹相关准则,还应该获知各雷达的设计技术状态和技术指标,如雷达处理范围(工作量程、威力空域)、数据率、虚警率、分辨率、适应机动过载的能力、方位距离精度、航向航速精度、航迹时戳的精度以及航迹质量的定义方式等,这是航迹相关的基本依据。
应该尽量积累雷达探测目标的实际数据统计,包括雷达探测各类典型目标(各种等速直航运动目标、加速减速运动目标、转弯机动目标、各种运动速度目标等)和在各种检测概率、复杂电磁环境下的典型目标航迹数据。这些将作为调整相关准则和验证相关准则的基础数据。
此外,应确定航迹相关准则需达到的相关概率,即DFC 对不同雷达、同一目标探测输出的航迹判断为同一目标的概率。
3 航迹相关流程和相关条件
3.1 航迹相关流程
数据融合处理中心根据各雷达探测目标的历史数据,建立融合航迹列表,初始化时该航迹列表为空。
单部雷达新建航迹送到融合处理中心,与融合航迹列表在时间和空间对准之后进行相关判别,若满足初始相关条件则判为航迹相关,认为是与融合航迹列表中的历史航迹数据为同一批目标,进行下一步的融合处理;若不满足初始相关条件则认为是雷达系统新发现的目标,补充到融合航迹列表,将这个判别过程称之为初始相关。
非新建的航迹也应与融合航迹列表中的目标进行后续相关,这是考虑到由于目标大机动、异常环境杂波影响下,可能多部雷达探测同一目标输出的航迹不满足初始相关条件,与航迹库中航迹初始相关没有相关上,被判为多批目标;后期因为航迹比较稳定,能够满足较为严格的相关条件,即可判为同一批目标的航迹,进行下一步融合处理,将这个处理过程称之为后续相关。
不满足后续相关准则的非新建的航迹,应该已经与融合航迹列表中某一目标航迹相关过,按照批号相关条件进行相关判别,满足条件的仍作为该目标的新探测信息,进行下一步融合处理;若不满足批号相关条件,则认为是虽然初始相关上,但实际为两批目标同步运动、被误判为同一批目标、现在已经分开运动的情况,应该判为独立的航迹,并将该航迹补充到融合航迹列表中:将这个处理过程称之为批号相关。航迹相关的流程如图1 所示。
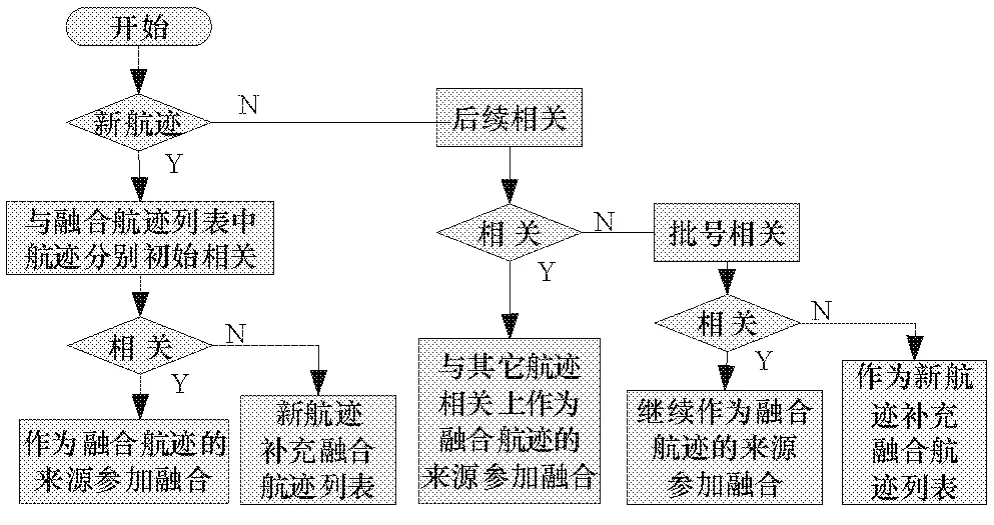
图1 航迹相关流程示意图
3.2 雷达精度与相关准则估算
以A、B 两部雷达同时探测同一目标的情况为例。假设A雷达建立的航迹与目标实际航迹的误差X 服从正态分布X~N,B 雷达建立的航迹与目标实际航迹的误差Y 也服从正态分布Y~,且X,Y 相互独立;A、B 两部雷达探测精度均方根误差均为50 ,系统差为0,一次差分满足正态分布。相关概率欲达到90%时,考虑雷达精度的相关准则分析如下。
两部雷达发现同一目标时,两者航迹的误差是X-Y,且X-Y 服从正态分布,即:

式中:μxy=μx-μy;σxy2=σx2+σy2。
若F(z )=0.9 ,即 相 关 概 率 为9 0% 时 ,91 .21 。
3.3 其他相关条件
考虑到目标的机动,若雷达建航适应的目标机动条件最大加速度为a,则在时间对准修正的时间t内,目标运动与等速直线运动相比,最大相距S=对于低速目标和高速目标,雷达的航向航速误差会有所区别。同时航向航速指标一般是对等速直航目标而言的,对于机动目标存在较大的测量误差。在方位距离满足相关条件的前提下,航向航速的相关条件应该放宽,对于低速目标,甚至可以不参考航向航速信息,这样可以减少误判。
时空对准过程中如果利用航迹的航向航速信息,应该考虑航向航速误差引起的位置误差,并在相关准则中进行考虑。而雷达时戳精度应该根据目标速度折算到位置的相关准则中。雷达探测目标由于需要采样后进行数字处理,所以必然会存在量化误差,相关条件中应根据量化单元进行考虑。
4 航迹相关准则
实际使用时,航迹相关条件可以适当放开,考虑到虚警概率,相关条件放开后误判为同一批目标的概率不大;若2 个目标同时进入,可以依靠雷达自身的分辨率分辨出2 个目标。
4.1 初始相关准则
在雷达精度指标基础上,考虑相关精度,结合量化误差和目标机动的因素,同时应考虑新建航迹的滤波尚未稳定,精度略低,将以上误差因素综合考虑,设定方位距离的相关准则。同时判断若航迹质量低时,准则可以适当放宽或者降低参与数据融合处理的权重。位置相关的前提下,对于高速目标,防止因为目标机动而导致无法相关,航向航速误差范围可以大大放开,对于低速目标应该不把航向航速作为相关条件。
4.2 后续相关准则
后续相关是在认为2 个目标航迹较为严格地一致时,将它们判为同一批目标。该准则可不考虑量化误差、目标机动等因素,同时相关概率可以适当降低,并且对高速目标可适当参考航向航速误差。设计时可以大致按初始相关条件的60%~80%考虑。
4.3 批号相关准则
这一准则是防止多批目标编队运动,初始相关判为同一批目标后,编队散开需要判为多批目标的情况,批号相关的条件可以大大放宽,以雷达分辨率作为参考,设计时可以大致按初始相关准则的200%~500%考虑。
5 结束语
雷达组网是当前国内外在防空、进攻作战中已被广泛采用的较先进的反侦察、反干扰、反摧毁、反隐身技术措施。由于雷达组网的使用,在战场上可以构成全方位、立体化、多层次战斗体系,具有全频段、多体制、多重叠系数等技术性能,大大提高了防空、进攻武器的战术性能,提高了战场生存能力。
本文根据工程经验,提出了雷达多源航迹相关的流程和参考准则,经过分析初步认为满足设计要求。此外,针对具体设备使用时,设计还应考虑航迹处理软件工作流程、航迹发送时机、航迹质量的定义、航迹外推标志、径向速度信息、目标回波幅度以及在实际使用中可参考的其他信息。
雷达组网,尤其是舰船平台下,可以补充利用光学、电子侦察、卫星、敌我识别等多种传感手段组网,利用多种传感手段探测到的目标运动特征、目标成像信息、目标视频信息、电磁特征等可以更准确可靠地对观测区域目标进行探测,掌握更丰富的目标信息,而不同传感器之间的信息相关需要对各传感器特性进行深入研究。
[1]姚磊,姚景顺.基于最有融合估计的雷达组网数据处理[J ].火力与指挥控制,2004 ,29(S1):118-119.
[2]唐斌兵.组网雷达系统中的数据融合[J ].模糊系统与数学,2001 ,15(3):105-110.
[3]方振和,刘喜斌,郑德胜.多传感器数据融合技术对抗隐身目标[J ].上海大学学报,1998 ,4(1):107-112.
[4]盛骤,谢式千,潘承毅.概率论与数理统计[M].北京:高等教育出版社,2006.
[5]姚景顺,杨世兴.海上编队舰载雷达之间同频干扰的消除方法[J ].现代雷达,2007 ,29(6):13-16.
[6]李圣衍,胡东,周宏宇,张浩元.雷达组网的干扰技术研究浅谈[J ].电子工程师,2006 ,32(11):4-6.
