情报雷达对隐身目标侦察的数据特点分析
2010-06-28肖力竑汤金平
肖力竑 ,汤金平 ,贺 辉
(1.解放军怀化预备役高炮团,怀化418000 ;2.解放军湖南预备役高炮团,长沙410000)
0 引 言
随着现代航空技术、精确制导技术的飞速发展,情报雷达检测的飞机、导弹等主要目标越来越现代化、隐身化,加之敌先进的干扰技术的综合运用,使空中目标环境日趋复杂,极大地影响着情报雷达对目标的探测和跟踪。雷达小目标如无人机、隐身目标及巡航导弹等,具有散射面积小、机动性和续航能力强、可超低空飞行和威胁程度高等特点,给防空作战武器构成了严重的威胁,使得对空情报雷达的探测距离大大减小,难以可靠、连续地检测目标。
隐身目标是专门针对有源雷达的工作原理设计的,其雷达散射截面积很小,电磁隐蔽性很强。因此,目标回波的度量信息将大幅减小,难以反映出目标的真实面貌,给有源雷达的搜索、发现和目标识别带来极大的困难。本文结合某隐身飞机模型的散射特性,对情报雷达对隐身目标侦察的数据特点进行了分析,雷达站只能在部分姿态下测得其断续点迹,但不能对隐身目标连续自动跟踪。
1 目标隐身技术
隐身技术又称为低可探测技术,它是改变武器装备的可探测信息特征,使其不易被雷达发现或发现距离缩短的综合型技术。由雷达方程式(1)可知,雷达对目标的最大探测距离Rmax与目标的RCS 呈1/4 次方函数关系。目标的雷达散射截面积减小,则雷达最大探测距离Rmax也随之减小:式中:Rmax为雷达对目标的最大探测距离;Pt为雷达发射机功率;Gt为发射回波的天线增益;Gr为接收回波的天线增益;λ为雷达载波波长;σ为雷达散射截面积;Pmin为雷达最小可检测信号。

假设某目标的雷达散射截面积为A,雷达最大探测距离为R,在其它条件不变时,若目标的雷达散射截面积为0.5A,雷达最大探测距离为0.84R;目标的雷达散射截面积为0.000 1A,雷达最大探测距离为0.10R。
飞机隐身技术的应用是航空领域的一项重大技术突破,它的出现和应用对各种防空探测系统和航空武器系统都是严峻的挑战,同时也对军用航空装备及空中作战产生了重大影响。
由于隐身飞机是专门针对有源雷达的工作原理设计的,其雷达散射截面积小,电磁隐蔽性很强。因此,目标回波的度量信息大幅减小,难以反映出目标的真实面貌,给有源雷达的搜索和目标识别造成极大的困难。
隐身飞机与常规飞机相比,雷达散射截面积通常降低1 ~3 个数量级。例如:B-1A的雷达散射截面积为B-52 的1/10 ,B-1B的雷达散射截面积为 B-52 的1/100 ,F-22 的雷达散射截面积为 F-15 的1/100 。表1 为几种典型隐身飞机的常规参数。

表1 几种典型隐身飞机的常规参数
2 某隐身飞机模型的散射特性分析
图1 为1 架隐身飞机实验模型的实测散射三面图,该模型具有与F-117A相似的多平面角锥外形,仅后掠角与长宽比不同。
图1(a)为偏航平面散射,表明该隐身飞机具有比常规飞机小的散射截面积,特别是在机头方向0°~±50°的偏航姿态角范围内,然后才是机翼和尾翼前缘垂向的窄散射高峰。在机尾方向,有一个刻度约为±10°的向内凹陷的低散射区。就偏航平面散射图而言,侧向左右舷处是散射最强的方向,但与常规飞机的圆柱机身和平板立尾在侧向产生的强辐射相比较,该隐身飞机的多平面角锥机身和倾斜V型双立尾在左右舷产生的散射低很多。

图1 某隐身飞机模型的实测散射特性三面图
图1 (b)为俯仰平面散射,表明在机头方向-45°~+70°的约115°的俯仰姿态角范围内,该隐身飞机均具有良好的隐身性能,但在下腹部(90°±10°)有一个比机头方向高出1 000 ~10 000 倍(30 ~40dB)的强散射区;在机背部约-110°~-45°的约65°的俯仰姿态角范围内,具有较大的散射截面积。
图1(c )为横滚平面散射,表明尽管左右舷侧向的散射截面积比常规飞机已经减小,但在大部分横滚姿态角范围内,仍具有较强的散射特性。
由图1(a)可知,假如雷达站在右后方A位置发现并跟上该隐身飞机,驾驶员只需把机头向右调转几度,使雷达站探测的方位处在A′的方向上,便能摆脱雷达站的跟踪(雷达散射截面积下降约12dB,雷达最大探测距离Rmax变为原来的50%);如果雷达站在B位置发现并跟上该隐身飞机,驾驶员只须将机头向左调转几度,便可摆脱雷达站的跟踪。
3 雷达站对隐身目标侦察的数据特点
图2 为雷达站探测某隐身飞机的示意图,假设隐身飞机以1Ma 的飞行速度沿航线l 等高匀速直线飞行。
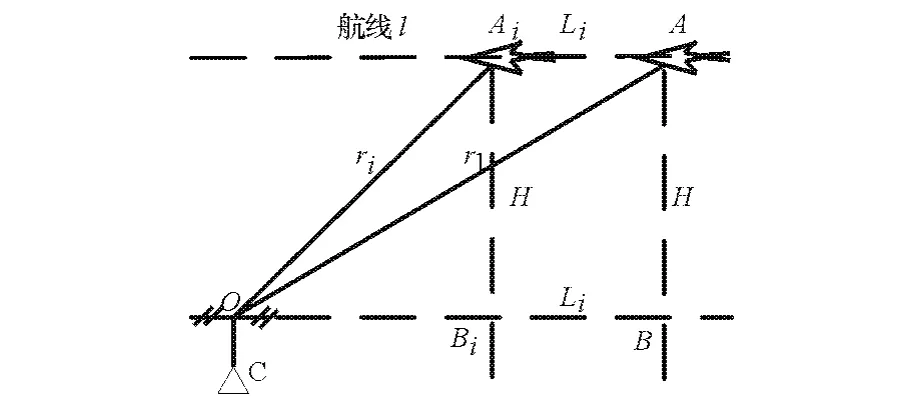
图2 雷达站探测某隐身飞机的示意图
隐身飞机与雷达站间连线的距离用ri表示,i =2 ,…,n,n 为雷达站扫描周期的个数。飞行高度H=13km,雷达站C 的扫描周期T=10s,最大探测距离Rmax=180km。雷达站C 在空间位置A点探测到该隐身飞机,且r1≈Rmax。该隐身飞机在雷达站接下来的第i 个扫描周期的空间位置点为Ai,水平投影点为Bi。

图3 为该隐身飞机实测偏航平面的姿态角与RCS 的关系图。
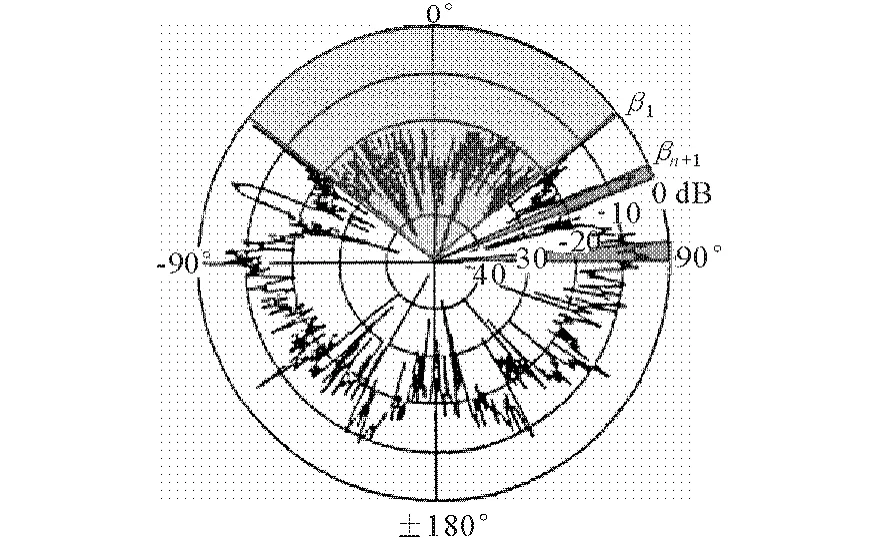
图3 该隐身飞机偏航平面的姿态角与RCS
从图3 中可以看出:该隐身飞机在0°~(β0-0.5°)范围内 RCS 都比较小,在β0±0.5°范围内RCS 出现一个比较大的峰值,此后有一个约为15°的向内凹陷的低散射区。当偏航姿态角为βi±2 .5°时,RCS 再次出现一个比较大的峰值:

式中:x 为 RCS 的分贝值。
由雷达方程式(1)可知:雷达最大探测距离Rmax与目标RCS 呈1/4 次方函数关系。目标的RCS 减小,则雷达最大探测距离也随之减小。设R为雷达站探测该隐身飞机的不同散射截面积时,由雷达方程求出的相对最大探测距离。
如果定义该隐身飞机的标准散射截面积σ=1m2,则该隐身飞机偏航姿态角、RCS 和R 之间的关系如表2 所示。
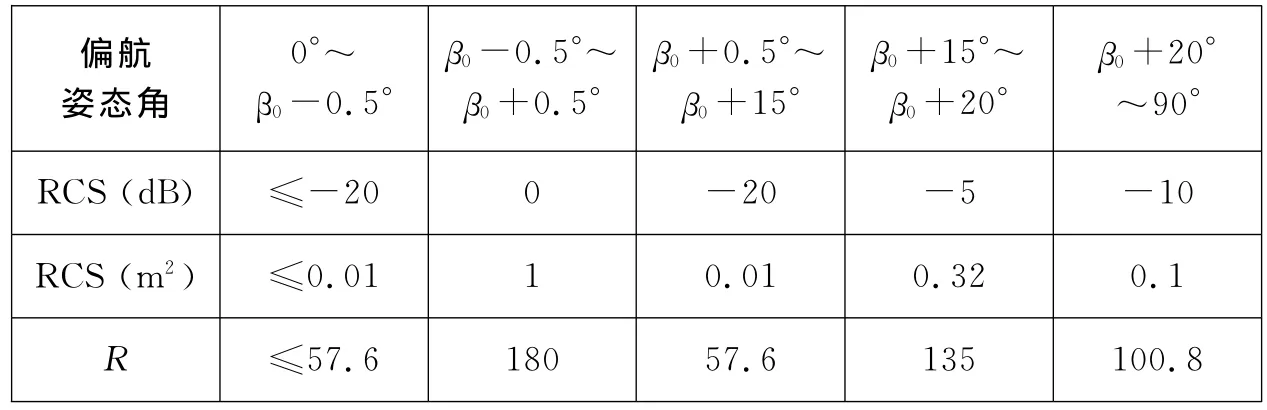
表2 该隐身飞机的偏航姿态角、RCS 和R的关系
表3 为隐身飞机向站飞行时,雷达站的第i 个扫描周期与ri、偏航姿态角及R≥ri的关系。
表3 中,区间1 为[0°,β0-0.5°]、区间 2 为[β0-0.5°,β0+0.5°]、区间3 为[β0+0.5°,β0+15°]、区间4 为[β0+15°,β0+20°]、区间5 为[β0+20°,90°]。当R≥ri时,令其值为1 ,表明雷达站能够探测到该隐身飞机;当R<ri时,令其值为0,表明雷达站探测不到该隐身飞机。
由于隐身飞机具有RCS 随雷达照射姿态异常分布的特征,单个雷达站在测量中常常只能发现几个断续的点迹,因而无法对其进行正确的航迹起始和有效的跟踪。
4 仿真实验
假设有2 批隐身飞机在某A 型雷达的监视区域内,其中:目标1 做匀速直线运动,目标2 做匀加速直线运动,初始参数分别为:
目标1 :x1=100km,y1=150km,z1=1km;vx1=0.2km/s ,vy1=0.1km/s ,vz1=0km/s ;
目标2 :x2=150km,y2=120km,z2=5km;vx2=0.18km/s ,vy2=0.3km/s ,vz2=0km/s ;ax1=1 .5m/s2,ay1=1m/s2,az1=0m/s2;
该雷达的最大探测距离Rmax=230km。
使用VC 6.0 作为平台,对A 型雷达探测隐身飞机的过程进行仿真。当R≥ri时,表明该雷达能够探测到隐身飞机,将其测得的点显示在雷达的平面位置指示器(PPI )画面上;当R<ri时,表明该雷达探测不到隐身飞机。图4 为某一时刻A 型雷达探测隐身飞机仿真实验的PPI 画面。从图4 中可以看出,对于目标1 ,雷达站仅能探测到一个点迹,目标2 仅能测得2 个点迹。在这种情况下,单个雷达站无法对目标进行航迹起始和有效的目标跟踪。

表3 第i 个扫描周期与ri 、偏航姿态角及R≥ri 的关系

图4 A型雷达某时刻的PPI 画面
5 结论
由于隐身目标具有RCS 随雷达照射姿态异常分布的特征,其雷达散射截面积小,电磁隐蔽性强,使得对空情报雷达的探测距离大大减小,单个雷达站在测量的过程中常常只能发现几个点迹,难以可靠、连续的检测目标。雷达站对隐身目标侦察的数据特点为点迹断续,无法对其进行正确的航迹起始和有效的目标跟踪。
[1]高腾.防空兵雷达分队战术[M].郑州:郑州防空兵学院,2002.
[2]刘成海.美俄新一代战斗机[M].北京:电子工业出版社,2004.
[3]汤金平.基于断续点迹的雷达网航迹起始方法研究[D].郑州:防空兵指挥学院,2009.
