一种多功能电液动轮椅的设计
2010-06-22陈立东刘胜韬郑俊玲李国昉马淑英
陈立东,刘胜韬,郑俊玲,李国昉,石 磊,马淑英,王 懂
(河北科技师范学院1.机电工程学院;2.欧美学院,河北 秦皇岛 066600)
随着社会的发展和人类文明程度的提高,人们特别是身有残障的社会成员愈来愈需要运用现代高新技术来提升他们的生活质量和生活自由度。据调查,因为各种交通事故、天灾人祸和种种疾病,每年均有成千上万的人丧失一种或多种能力(如行走、动手能力等)。目前,我国65岁以上的老年人和需要使用轮椅的残疾人有一亿人以上,而且社会的老龄化程度还在不断提高。因此,如何利用现代技术来扩大残疾人和老年人的生活空间、提高他们的生活质量,给他们带来更多的自由和方便成为近几年来国际学术界和企业界关注的热点。轮椅作为残疾人和行动不便的老年人的代步工具,越来越受到市场的欢迎。但目前,市场上的轮椅要么结构简单、功能单一,安全性、机动性差,要么价格昂贵、经济性差,普通家庭购买不起。这就要求国内生产的电动轮椅不仅实用性要强,价格也要便宜。国内一些生产厂家和科研院所对电动轮椅做了一定的研究,但与国外相比还很不完善。为此,本文研制了一种适合我国国情的具有速度控制、高度调节及靠背角度调整的多功能电液动轮椅。
1 基本结构
轮椅主要由轮椅座位提升系统、电机驱动系统、靠背倾角调节装置、调速与制动系统、转向机构、单片机控制系统和前后轮等组成,其框架采用四点支撑立体结构,材料使用高强度不锈钢管,可以提高轮椅的刚度和强度,基本结构如图1所示。
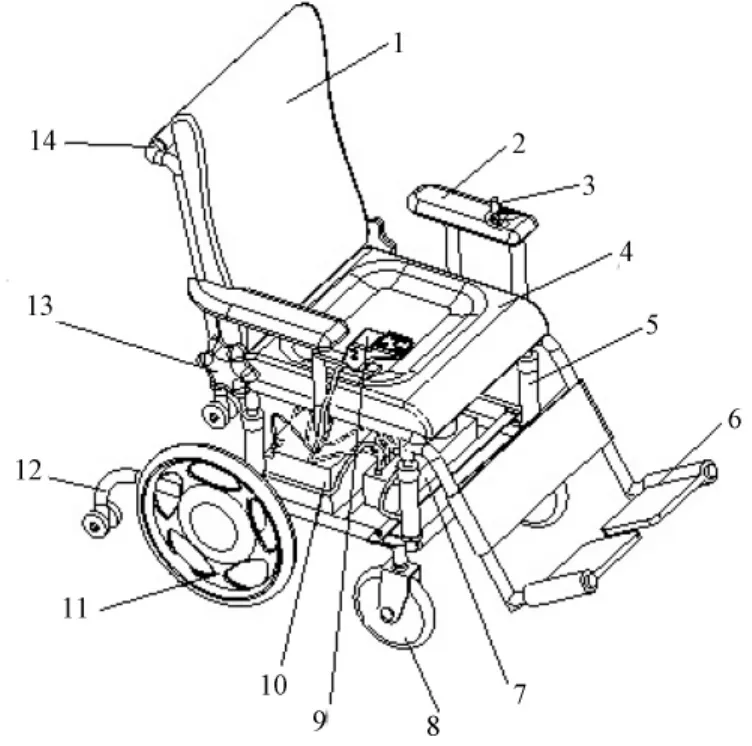
图1 多功能轮椅基本结构
2 主要部件的设计
2.1 轮椅座位提升系统
轮椅座位提升系统主要是用来调整轮椅座位的高度。当乘用人需要抬高身体去拿高处物品时,可以通过操纵轮椅座位升降开关来控制液压泵工作,使前后四个支腿液压缸工作,提高座位高度。轮椅座位提升系统主要由电源开关、电磁控制开关、液压缸、溢流阀、分流阀及管路等组成[1-3],其系统原理如图2所示。
轮椅座位提升系统由一个三位四通电磁换向阀控制其工作状态,当电磁换向阀处于左位时,液压泵的压力油经过电磁换向阀的左位,经节流阀到前排分流阀和后排分流阀,然后分别供给前排和后排液压缸。设置分流阀的目的是使前后四个液压缸提升平稳且同步性好。当到达指定高度时,使电磁换向阀处于中位即可切断油路,座位停止在指定位置。当需要降低座位时,只需使电磁换向阀右位接通,即可控制液压缸缩回,座位回落。此外,在回油路上设置了一个单向阀,起背压阀的作用,可以改善座位回落时的平稳性。座位最高可以升高42 cm,能够满足一般高度拿取东西时的需要。

图2 轮椅座位提升系统液压原理图
2.2 电机驱动控制系统
电机驱动控制系统由48 V直流电源(4块蓄电池)、速度手柄位置开关、单片机、功率驱动及功率开关电路、速度/电流检测电路、直流无刷轮边驱动电机等组成,其驱动控制原理如图3所示。功率开关电路由6个功率晶体管构成三相全桥逆变电路,把直流电压转化为交流电压,驱动电机运转。功率驱动电路把单片机输出的0~5 V的电平控制信号,进行功率放大,转换到0~15 V,用来控制功率开关电路中的功率晶体管。速度/电流检测电路采集速度、电流的反馈信号。
2.2.1 驱动电机的选择
驱动电机选择直流无刷电机,与轮椅后轮做成一体,其特点是启动和爬坡力矩大,使用可靠,维护简单。无刷直流驱动电机轮由电机本体、车轮、转子位置传感器、功率开关电路组成,其额定电压为48 V,额定功率250 W。
2.2.2 控制系统的原理
单片机接收速度控制手柄给定的速度信号,并根据电流、速度的反馈调整输出的PWM信号的占空比,控制电机转子的转速。
无刷电机内部的霍尔元件的输出信号经过位置信号检测电路,将电机转子的当前位传递给单片机,单片机根据此信号计算出电机的转速,同时输出对应的换相信号。驱动电路根据单片机的输出指令,控制三相桥功率开关电路上下功率管的导通顺序和导通时间,从而实现对无刷电机的转速调节。
单片机采用 ATmega103,具有更快的处理速度,具有更低的功耗,可以使蓄电池工作时间更长。该单片机具有独立的PWM输出口,可以更灵活地控制PWM的占空比的输出,内置10位的A/D转换器,8位 PWM发生器,具有很高的分辨率,使编程更为简单,采用FQFP64脚的封装,占用更小的电路板空间,可以利用JTAG进行在线调试,还可以利用ISP进行程序的下载,多个中断向量使程序控制更为及时、有效,具有稳定性好、抗干扰性及灵活性完善的特点。
2.2.3 系统硬件设计
整个系统主要包括转子位置检测电路、测速电路、调速电路、全桥电路、限流电路等。其中,无刷直流电机由电动机本体、转子位置检测器和电子开关电路三部分组成[4]。直流电源通过开关电路向电动机定子绕组供电,位置检测器可随时检测转子的位置,并根据转子的位置信号来控制开关管的导通和截止,从而实现电子换向。
单片机控制系统硬件连接如图4所示,AT-mega103单片机接收ADC0809转换后的数字信号以及刹车、加速、减速按钮的信号,以此决定PB口的输出、控制PWM的占空比的输出,进而来进行速度控制、速度显示灯发光的个数控制等。
2.2.4 系统软件设计
ATmega103在软件上能有效地支持C语言及汇编语言。目前,汇编语言是嵌入式系统设计的通用语言,它既有模块化编程、可读性好、维护方便的特点,又具有对硬件访问方便、代码效率高的特点[5]。本设计采用汇编语言编程实现,具有很好的通用性,其程序流程图如图5所示。
设置ADC0809的端口地址为0FH,IN0号模拟输入通道接电池电压信号,IN1号模拟输入通道接电机电枢电流信号,IN2号模拟输入通道接电机转速信号。设置PWM的端口地址为0EH。
Atmega103的PB口输出PWM控制信号,由PF口输入ADC0809转换后的数字信号。PC.0口接刹车按钮,PC.1口接加速按钮,PC.2口接减速按钮,PC.3口接启动按钮。
2.3 转向机构的设计
转向机构主要采用机械传动,如图6所示。当乘坐者转动操控手柄1时,传动杆2受扭矩发生转动,通过滑块4将力和运动传动给连杆5,使杆5产生左右运动,从而带动前轮6左右转动。这样,方向控制功能就实现了。其中,支架3起定位作用,以防止传动杆2在传递扭矩的过程中产生弯曲变形。

图6 转向机构图
3 附加装置设计
3.1 防后翻倒装置
为防止轮椅因坡度过大,途遇障碍物或使用者坐姿错误等原因造成的轮椅突然向后倾倒现象的发生,本轮椅加设了防后翻倒装置。具体结构如图7所示。

图7 座椅防后翻装置
3.2 背椅角度调节装置
为了满足不同使用者的身体状况需求,提高使用者乘坐时的舒适性,加设了此装置。为实现此功能,该轮椅采用了当前被广泛使用的调角器。调角器中具有能实现锁止和解锁功能并调节角度的部件。该部件可与不同的连接板连接而组成不同的调角器,以适用于不同结构的座椅。
4 结论
该轮椅结构紧凑,装配简单,能够实现批量生产,与同类产品相比,具有较高的性价比且操作便捷,适合老年人和残疾人使用;结合使用电机驱动系统、液压调整系统和相关机械零件可以实现自动行驶;手动转向、制动及轮椅靠背倾斜角度的调整,其独特之处在于能在一定高度范围内自由调整轮椅高度并自锁,保证安全,另外实现了手动自由变速且操作简单;该轮椅的最高时速有待试验确定,座椅的升降高度需要进一步进行市场调查研究。
[1]齐晓杰.汽车液压与气压传动[M].北京:机械工业出版社,2008.
[2]吴振顺.液压控制系统[M].北京:高等教育出版社,2008.
[3]刘延俊,关浩,周德繁.液压与气压传动[M].北京:高等教育出版社,2007.
[4]于军琪,陈登峰,何波.单片机原理及应用[M].北京:中国电力出版社,2008.
[5]周坚.单片机项目教程[M].北京:北京航空航天大学出版社,2008.
