独立式风光互补发电系统中最大功率控制策略研究
2010-06-21方瑞明
唐 雁,方瑞明
(华侨大学信息学院电气工程系,福建泉州 362021)
独立式风光互补发电系统中最大功率控制策略研究
唐 雁,方瑞明
(华侨大学信息学院电气工程系,福建泉州 362021)
0 引言
电能在远离电网的偏远山区可由基于可再生能源的独立发电系统提供。风能作为一种天然的绿色的可再生能源,近些年越来越受到人们的重视。但是,由于风能具有很大的变化和不定性使得风电能很不稳定,所以必须再找一种能源能与之互补,而太阳能和风能就具有一种很天然的互补性[1]。风光互补发电系统就是一种充分利用太阳能和风能互补性的无环境污染的新型能源发电系统。
一个典型的独立风光互补发电系统如图1所示,它通常由以下部分组成:风力发电机组,太阳能光伏阵列,DC/DC变换器,AC/DC整流器,DC/AC逆变器,控制器,蓄电池组以及交直流负载。
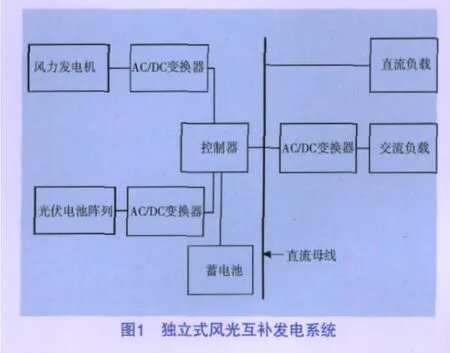
其中,风力发电机组和太阳能电池起着将风能和太阳能转化为电能的作用,这也是整个系统中最为重要的一个部分。由于独立风光互补发电系统无法从电网获取电能,是一个独立的发电系统,那么如何从风能和太阳能中获取尽可能大的能量且使得由风机和光伏电池输出的功率最大是这一部分的主要任务。而蓄电池作为整个系统的储能元件,起着存储电能以保证连续可靠的为负载提供电能的作用,另外蓄电池的寿命以及利用效率也受充放电方式的影响,所以对蓄电池的充放电策略研究是很有必要的。本文就风力机的最大功率运行和光伏电池的最大功率跟踪的各种控制策略进行了分析,同时也对蓄电池的充放电策略进行了介绍,并比较了各种方法的优缺点。
1 能量获取部分的最大功率输出
1.1 风力发电机组的最大功率运行
任何能量的传递都会产生损失,所以风力发电机也只能吸收部分风能。上游风的机械功率可由下式给出。

式中,ρ为空气密度,kg/m2;A为风轮扫掠面积,m2;V为风速,m/s。
那么风力发电机实际吸收的风能为

式中,Cp为风能功率系数,用来衡量风能利用的程度,理论最大值为0.59,经常表示为风轮叶尖速比(Tip Speed Ratio,TSR)的函数[2]。这里TSR=2πRn/v,其中R是风轮半径,n是风轮叶尖转速,v是风速,它与Cp的函数关系见图2。

式中,λ表示叶尖速比。
如果计入风力机将吸收的风能转化为电能的损耗,那么风力机发出的电功率可由下式表示
式中,η表示风力机将风能转化为电能的效率。
由式(2)可以看出在空气密度,风轮扫掠面积和风速一定的情况下,风力发电机组发出的电功率只与Cp成正比,而Cp与TSR又呈一定的函数关系,所以理论上调节TSR到一定程度就可以得到最大输出功率。另外风力机的输出功率与风力机的风轮转速也有关系,如图3所示。
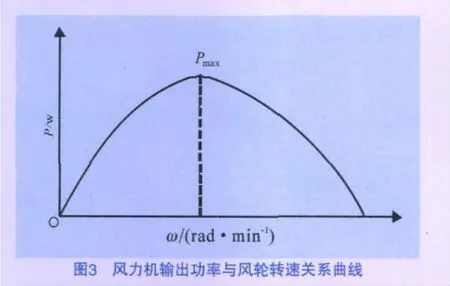
根据以上输出功率与TSR以及风力机风轮转速的关系,可以将风力机最大功率跟踪的控制方案分为以下3种。
1)峰值功率点跟踪控制。前面提出,风力机输出功率与风轮转速的关系曲线有明确意义的单个最大值点。峰值点局部位于一个平坦的区域中,也就是说最大功率点的一个必要条件是:dp/dω=0。该控制方案具体实现如下:风轮转速增加或减少一个小的增量,功率被连续地测量,并且连续地计算△P/△ω。如果该比值是正的,则可以通过提高转速的方法增加功率;相反,如果比值为负,则可以进一步改变转速以减小发出功率,使得最终转速保持在使△P/△ω接近于0的水平。此方案不涉及到风速的测量,故不存在风速测量误差带来的影响,缺点是功率点不能完全稳定在最大功率点,只能在其左右徘徊,但总体说来是一种效果较好的控制方案[2]。
2)采用风速信号控制。连续的测量风速信号,用它与风力发电机的转速相比较,组成闭环控制系统,用来控制风力发电机的电功率输出,使风力机的转速正比于风速变化,使得TSR保持在最优参考值左右。这种控制方式的优点在于控制原理简单明了,操作比较简单。但是其缺点也同样突出,由于风速的随机性很大,并且受诸多因素的影响,所以风速的准确测量难度很大。所以实时得到的数值与参考值有较大的误差就难以避免[3]。
3)采用功率信号控制。根据式(2)可以看出,若取Cp为理论最大值,那么在空气密度,风轮扫掠面积以及Cp一定的情况下,风力机所吸收风能(也可以视为机械功率)与其转速的三次方成一定比例,且这一比例理论上是恒定的,那么就可以通过测量风机机械功率与转速,通过励磁调节器来调节发电机的输出就可以实现风力机按最大功率运行。由于实际要测得风力机的机械功率比较困难,所以可由发电机输出电功率近似代替。这个方案由于用发电机输出功率代替机械功率,所以不能完全保证风力机运行在最大功率状态下。
1.2 光伏电池的最大功率跟踪
在日照强度和温度一定的情况下,太阳能光伏电池的特性曲线如图4所示,其中实线是输出I-V曲线、虚线是P-V曲线。

从图4可以看出,光伏电池的输出功率存在着一个最大值,它所对应的电压和电流分别为Vm和Im。但是,随着温度和日照强度的变化,P-V曲线将发生变化,图5是不同光照强度下的光伏电池特性曲线。
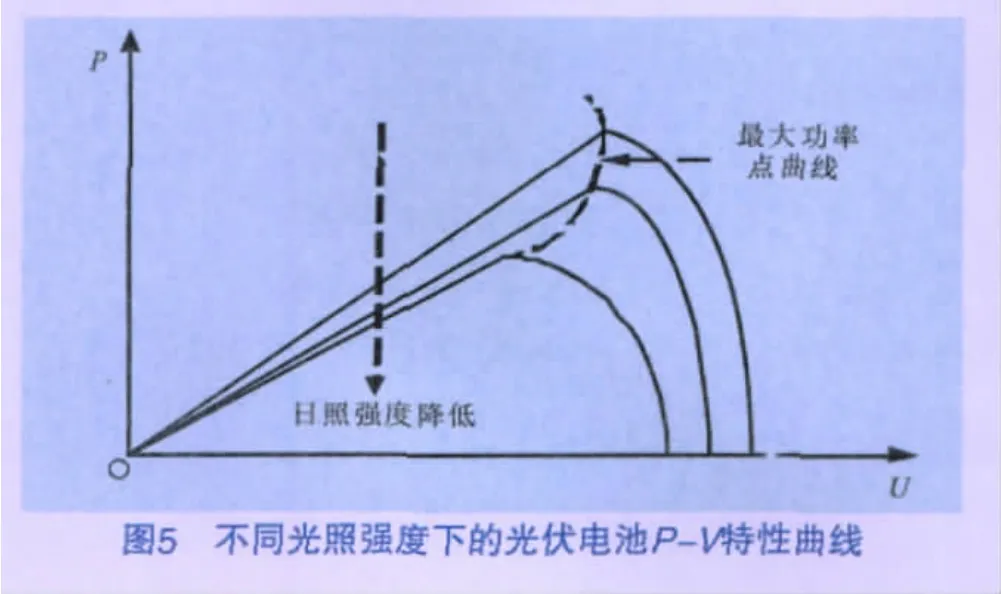
所以,光伏电池的最大功率跟踪也就是实时调整光伏电池的工作点,使之始终工作在最大功率点附近,这样才能保证光伏电池输出的电功率最大。最大功率点跟踪控制的原理就是实时检测光伏阵列的输出功率,采用一定的控制算法预测当前工况下阵列可能的最大功率输出,通过改变当前的阻抗情况来满足最大功率输出的要求[4]。常见的最大功率跟踪方法有以下10种。
1)实际测量法。实际测量法[5]是在系统之外另设置一块太阳能电池作为整个系统的参考模型,并每隔一段时间即侦测电池的开路电压和短路电流,来求出相同大气状况下整个系统最大功率点的电压和电流。再配合适当控制能使此系统以此电压或电流运行来达到最大功率输出。此法能比较有效的避免因太阳能电池老化等造成的准确度误差的问题,但是另一方面也增加了成本,折中考虑比较适用于需较大功率输出的系统。
2)扰动观察法。扰动观察法[5-6]是目前实现最大功率跟踪常用的方法之一。其原理是每隔一段时间增加或者减少光伏电池的电压,观测增加或减少后输出功率的变化情况,如果增加电压后功率也增加则继续增加电压,若减小电压后功率增加,则继续减小电压。这种方法控制比较简单,但是只适合于那些光照强度变化很缓慢的场合,当外部环境变化较快时,此法则会损失较大功率,很可能发生误判,且最大功率点有小范围的振荡[7]。针对此,很多文献提出了改进的扰动观察法,文献[8]提出了采用模糊控制等方法来优化扰动步长,文献[9]采用了3点加权比较来避免外部环境发生突变发生的误判。还有一种基于占空比的扰动观察:光伏阵列和负载间一般采用PWM变换器进行能量流动与转换,在此种结构中采用占空比为控制变量[10-11]。
3)电导增量法。电导增量法也是最大功率跟踪的常用方法。由P-V曲线图可以看出,阵列在最大功率点处功率对电压的斜率近似为0,也即dp/dv=0,而P=IV,那么dp/dV=I+VdI/dV=0,也即dI/dV。也就是说要使输出功率最大,必须使阵列的电导变化率等于负的电导值[12]。此法控制精确,响应速度较快,适用于大气条件变化较快的场合。
4)直线近似法。随着日照变化,太阳能电池的最大输出功率会有近似线性关系,直线近似法就是近似直线的关系来达到最大功率跟踪。此法需配合正确的太阳能电池参数,近似误差才能控制在比较小的范围内,但参数会因电池的老化而改变,造成功率损失。
5)智能控制法。智能控制法,用得最多的是模糊控制与神经网络控制。前者是以功率对电压或电流的变化及其变化率来作为模糊输入量,并通过模糊化处理以及专家经验进行模糊判别给出调节输出的隶属度,最后根据隶属度值进行反模糊化处理得到控制调节量以实现最大功率输出;后者通过测量阵列当前的开路电压、环境温度以及实时时间,利用已学习好的神经网络给出主阵列最优的输出电压。由于风光系统是一个非线性系统,且难用精确的数学模型来描述,对于这类系统模糊逻辑控制可以达到比较理想的效果[13]。
6)最优梯度法。最优梯度法[14]是以阵列的I-V特性关系函数为基础,选取目标函数的负梯度方向(对于光伏系统可能需要选择正梯度方向)作为每步迭代的跟踪方向,逐步逼近函数的最小值或者最大值。此法运算简单,效果比较理想。
7)间歇扫描法。间歇扫描法[15]其原理是定时的让系统在一段电压范围内工作,记录下各工作点的功率,比较找到最大功率点,然后让系统工作在最大功率点上。它与前两种方法不同,不需要不停地搜索,只要定时进行一次扫描即可,但是它不能及时同步跟踪阵列输出。
8)电压回授法。电压回授法[15],也即恒压控制法。此法事先测得在某光照和温度条件下光伏阵列在最大功率点的电压大小,再调整光伏阵列的端电压使其与实测电压值相符来达到最大功率点跟踪的目的。此法缺点是当光伏阵列的功率输出随着温度变化的情况下,光伏阵列的输出功率将会偏离最大功率输出点,产生较大功率损失,所以对周围温度的变化有严格要求。
9)功率回授法。功率回授法[15]是在电压回授法的基础上加入了输出功率对电压变化率的判断,也就是改变输出功率判断此时是否dp/dω=0,当dp/dω=0即是为工作在最大功率点。相比电压回授法此法较为复杂,但效果也提高很多。
10)滞环比较法。此法在扰动观察法基础上增加一个反向扰动比较点[15]。其主要思想就是比较三个点的功率,如果功率变化方向一致(即正扰动使功率增加,负扰动使功率减少,或者正扰动使功率减少,负扰动使功率增加)则调整扰动,否则不进行。此法可在日照量快速变化时并不立即跟随并快速移动工作点(可以避免干扰或误判错误),而是在日照量较稳定时再跟踪到最大功率点,所以可减少扰动带来的能量损失[16]。
2 储能部分的充放电控制策略
2.1 风光系统蓄电池的运行方式
风光系统中储能元件一般都采用蓄电池,蓄电池在风光系统中起着能量的存储作用,是不间断为负载提供电能的关键元件。蓄电池主要有3种运行方式:循环充放电制、定期浮充制和连续浮充制。其中连续浮充制是将蓄电池组并接在负载回路上,蓄电池保持少量的充电电流,并对波动的负载电流起补偿作用,正常情况下总有光伏电池直流电压加在蓄电池两端柱上,只要蓄电池电压低于直流电源,电源就对蓄电池充电,当直流电源不够时,才启用蓄电池对负载供电[4]。从中可以看出这种运行方式比较适合于风光互补发电系统,所以一般情况风光系统的蓄电池都采用连续浮充制。连续浮充制的蓄电池充电过程分为3个阶段:(1)快速充电,沉积已释放容量的80%~90%;(2)渐弱充电,充电速率逐渐降低,充完剩余的能量;(3)涓流充电,在蓄电池充满电后用于抵消其自放电速率[2]。整个充电过程蓄电池的端电压和电流情况如图6所示。

2.2 风光系统蓄电池的充放电策略
蓄电池的充电主要有以下几种策略[4-5]。
1)恒流充电:一直以恒定不变的电流进行充电。存在的缺点是开始充电阶段恒流值比可充值小,在充电后期恒流值又比可充值大;整个充电时间长,析出气体多,对极板冲击大,能耗高,充电效率低。
2)恒压充电:即对每只单体蓄电池以某一恒定电压进行充电。此方法简单易行,充电效率也可达80%。缺点主要是充电初期如果蓄电池放电深度过深,充电电流会很大,危及充电器安全;另一方面如果充电电压选择过低,则到了充电后期电流过小,充电时间会比较长。因其控制简单,效果良好,因此是目前大多产品采用得较多的一种充电策略。
3)恒压限流充电:在充放电器与蓄电池之间串联一个电阻,可自动调整充电电流,使之不超过某个限度,充电初期的电流得到控制。该方法的缺点是串联电阻消耗部分电能。
4)快速充电:一般是使电流以脉冲方式输给蓄电池,并随着充电时间的延续,蓄电池有一个瞬时间的大电流放电,使其电极去极化。此法适合于那种需要蓄电池迅速充放电的场合。
5)两、三阶段充电:两阶段充电方式也即在充电初期采用恒流充电方式,蓄电池充电达到一定容量后,然后采用恒压方式充电。而三阶段充电,可以由图6加以分析得到。在第一阶段,由图6可以看出蓄电池电流几乎不变,而电压有比较大的提高,所以这个阶段可以检测蓄电池端电压,当电压增大速率减小时则说明充电进入了第二阶段。第二阶段,电压变化幅度很小,而电流下降很快,所以可以通过测量电流大小来判断第二阶段结束与否。当电流下降速率很慢的时候则可以认为充电进入了第三阶段。由此可以看出,三阶段充电法最符合蓄电池充电过程状态,所以效果也最好,但是控制比较繁琐,困难。
6)智能充电:是利用先进技术按照蓄电池可以接受的电流来实现的智能充电控制方法。目前越来越多的控制领域都采用了智能控制技术,表现出了一定的优越性,这种智能控制方法在今后的蓄电池充电控制策略中也应该占据主导地位。
7)均衡充电:主要是为蓄电池组中某些蓄电池由于电池特性或环境原因造成充电不均匀,而以小电流进行的过充方式。
对蓄电池的充电控制策略是研究的热点,在蓄电池放电控制策略这方面研究的较少,文献[17]提出了一种较为复杂的方案,采用多个蓄电池的组合作为储能元件,并通过监测蓄电池的荷电状态来控制各蓄电池的放电,当所有蓄电池的荷电值都小于某一个荷电值的时候就均衡使用所有蓄电池,当有部分蓄电池荷电值大于或等于该荷电值时就选择荷电值较小的这部分电池优先放电,直到达到规定的放电深度停止放电,再让其他的蓄电池进行放电。文献[18]采用了一种简单的放电策略:当蓄电池放电时,同时打开充电通路对蓄电池充电,当蓄电池电压降到预定的放电电压(放电深度)时,停止放电。这种方法简单明了,虽然效果达不到最优,但不失为一种实用的方法;文献[17]的方法较文献[18]提出的方法能比较大的提高蓄电池在放电结束后进行充电的效率,但就对一些小型系统来说还是文献[18]的方法比较经济实用。另外,由于随着温度的变化,蓄电池的电压电流特性会有所变化,所以在采用以上控制策略的同时也要考虑实时进行温度补偿。
3 总结与展望
本文就独立风光互补发电系统的能量获取部分和能量存储部分,即风力机和光伏电池的最大功率输出控制策略和蓄电池充放电控制策略做了介绍,分析了各种方法的优缺点。
风力机部分的控制策略有很多,本文中的风力机的最大功率运行的控制策略是建立在输出功率与TSR和风机风轮转速的关系的基础上来进行总结的,分别是基于最优叶尖速比的方法和爬山法,基于最优叶尖速比的控制策略在理论上控制简单,效果良好,但在实际应用中由于风能的不定性会带来不少能量的损失。而爬山法,由于不需要测风速,所以距最优误差较小。
光伏电池的最大功率跟踪论述了10种常见方法,重点介绍了扰动观察法,这个方法已经有很多文献提出了改进的方法,目前已经比较成熟。这10种方法实现的最大功率跟踪的基本原理都是类似的,但是具体实现的难易度及效果有所不同,在实际使用中也有各自的优势和劣势,所以,如何将各种控制策略的长处结合起来,尽可能弥补短处,更好的满足实际应用的要求是将来最大功率跟踪控制策略发展的方向。
在蓄电池充放电方面介绍了常用的充电策略,着重分析了三阶段充电法,这种方法完全是根据蓄电池充电过程电流电压曲线提出的,效果也最好,但是由于控制比较复杂,比较适用于较大系统且对蓄电池充放电要求较高的场合。蓄电池的放电介绍了2种典型的方法,一种是将蓄电池分组,将蓄电池分组投入使用;另一种就是设置一个电压阀值,一次性切除蓄电池。这2种方法原理基本相同,都是设置保护阀值来控制蓄电池放电,但将蓄电池分组的方法在蓄电池放电结束后进行充电时更高效。

[1]Yang J M,Cheng K W E,Wu J,etal.TheStudyoftheEnergy Management System Based-On Fuzzy Control for Distributed HybridWind-SolarPowerSystem[J].2004:113-117.
[2]MukundR Patel.Wind and Solar Power Systems Design,Analysis,andOperation(SecondEdition)[M].姜齐荣,张春朋,李虹,译.北京:机械工业出版社,2008.
[3]许洪华,倪受元.独立运行风电机组的最佳叶尖速比控制[J].太阳能学报,1998,19(1):30-35.
[4]赵争鸣,刘建政,孙晓瑛,等.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[5]施全富.独立运行风光互补发电系统的研究与设计[D].辽宁:沈阳工业大学,2008.
[6]Hussein KH,Muta I,HoshinoT,et al.MaximumPhotovoltaic Power Tracking:an Algorithm for Rapidly Changing Atmospheric Conditions,Generation,Transmission,and Distribution[J].IEEProceedings,1995,142(1):59-64.
[7]Femia N,Pet rone G,Spagnuolo G,et al.Optimization of PerturbandObserveMaximumPowerPointrackingMethod[J].IEEE Transactions on Power Electronics,2005,20(4):963-973.
[8]Altas I H,Sharaf A M.A Novel On-line MPP Search Algorithm for PV Arrays[J].IEEE Transactions on Energy Conversion,1996,11(4):748-754.
[9]Chee Wei Tan,Green T C,Hernandez-Aramburo C A.An Improved Maximum Power Point Tracking Algorithm with Current Mode Control for Photovoltaic Applications [C]∥International Conference on Power Electronics and Drives Systems.KualaLumpur,Malaysia,2005:489-494.
[10]Femia N,Pet rone G,Spagnuolo G,et al.Optimizing Duty-cycle Perturbation ofP&OMPPTtechnique[C]∥IEEE 35th An2nual Power Electronics Specialists Conference.Aachen,Ger2manyIEEE,2004:1939-1944.
[11]FemiaN,PetroneG,SpagnuoloG,et al.Optimizing Samplingrate of P&O MPPT Technique[C]∥IEEE 35th Annual Power Electronics Specialists Conference.Aachen,Germany:IEEE,2004:1945-1949.
[12]Tae-Yeop Kim,Ho-Gyun Ahn,Seung Kyu Park,et al,A Novel Maximum Power Point Tracking Control for Photovoltaic Power System under Rapidly Changing Solar Radiation[J].IEEE International Symposium on Industrial Electronics,2001.Proceedings.ISIE 2001(2):1011-1014.
[13]Tsai-FuWu,Chien-HsuanChang,Yu-Hai Chen.A Fuzzy-Logic-Controlled Single-Stage Converter for PV-Powered Lighting System Applications[J].IEEE Transactions on Industrial Electronics,2000,47(2):287-296.
[14]Dag H,Alvarado F L.Toward Improved Uses of the Conjugate Gradient Menthod for Power System Applications[J].IEEE Transactions on Power Systems,1997,12(3):1306-1314.
[15]曹倩茹.光伏发电的最大功率跟踪研究[D].陕西:西安科技大学,2006.
[16]冯垛生.太阳能发电原理与应用[M].北京:人民邮电出版社,2008.
[17]欧阳名三.独立光伏系统中蓄电池管理的研究[D].安徽:合肥工业大学,2004.
[18]钟勇.风光互补发电系统中蓄电池充放电控制器的研究[D].安徽:合肥工业大学,2006.
Overview of Maximum Power Control Strategies in Stand-Alone Wind and Solar Hybrid Generation Systems
TANG Yan,FANG Rui-ming
(Electrical Engineering department,school of information sciences,Huaqiao University,Quanzhou 362021,Fujian Province,China)
A Stand-alone wind/solar hybrid generation systemcan be divided intothree parts fromthe perspective energy:energy getting,energy storage and energy consumption.In the hybrid generation system,these three parts correspond with the wind turbines and photovoltaic arrays, batteries and energy-consuming load,respectively.The energy getting part transforms the wind and solar power into electric power,while the energy storage part regulates energy and balances load.This paper introduced control strategies for the maximum power operation of wind machines and maximum power point tracking of solar photovoltaic battery in the energy getting part,as well as batteries charge and discharge control strategies in the energy consumption part with a detailed analysis made on the 3-stage of the charge strategies.Atlast,asystematicaloverviewwas made on the research method for the maximumpower control strategies and an outlook on thedirection forfutureresearchesin thisareawaspresented.
stand-alone wind and solar system;maximum power point tracking;batteries charge and discharge
独立风光互补发电系统从能量的角度来看可以分为3部分,即能量获取部分,能量存储部分以及能量消耗部分。主要介绍了能量获取所涉及的风力机最大功率运行和光伏电池最大功率跟踪这2个问题的控制策略,同时对能量存储部分所涉及的蓄电池充放电的控制策略进行了介绍,其中对充电策略的三阶段法做了比较详细的分析。最后对最大功率控制策略的研究方法作了系统的评述并对该领域今后的研究方向作了展望。
独立风光系统;最大功率跟踪;蓄电池充放电
福建省自然科学基金(2008J0021);泉州市科技项目(2009G7);厦门市科技计划项目(3502Z20093026)。
1674-3814(2010)08-0053-06
TM614;TM615
B
2010-03-05。
唐 雁(1985—),男,硕士研究生,主要研究方向为新能源发电技术。
(编辑 徐花荣)
