超声速光学头罩流场的PIV研究
2010-04-15田立丰易仕和赵玉新程忠宇
田立丰,易仕和 ,赵玉新 ,何 霖,程忠宇
(国防科学技术大学航天与材料工程学院,长沙 410073)
0 引 言
光学寻的超声速光学头罩周围流场中存在多种复杂流动,导致观察窗口附近流场折射率的非均匀分布,尤其是湍流边界层的存在造成了折射率的随机变化。目标的红外光线通过这样的流场,会产生偏折、抖动甚至模糊,大大降低其对目标的探测、识别和跟踪能力[1]。为降低这种影响,需要对超声速光学头罩流场进行研究,进而分析流场结构和光学性能之间的联系。速度分布体现了流场的动力学特性,主导了流场结构的变化,进而影响流场的光学性能。笔者采用PIV技术对超声速光学头罩流场的速度分布进行了实验研究。
PIV是上世纪80年代发展起来的一种新的流场测速技术,能够测量全场的瞬态速度分布。其优点在于:突破单点测量的局限,实现全场瞬态测量;非接触测量,对流场干扰小;容易从速度分布求得其它物理量。因此,PIV技术作为流场测速的有力工具得到了广泛的应用。并且随着激光技术、CCD技术、图像处理技术的发展,PIV测量流场的速度范围也得到了提高[2]。
与低速流动相比,超声速流场具有速度高、梯度大、可压缩性强和流动结构复杂的特点,用PIV方法测量速度场需要注意以下几个问题:
(1)超声速流场中通常存在很大的速度梯度,要想很好地反映流场结构,要求PIV示踪粒子的跟随性良好;
(2)超声速流动速度很快,用PIV测速时,图像对之间的时间间隔很短,一般在微秒量级。因此,要求同步控制器精度很高,进而保证测量结果的精度;
(3)超声速流场的低密度区域,示踪粒子浓度较低,粒子散射光强较弱,信噪比相对较低。为了不影响PIV计算结果的精度,片光光源应具有较高的能量;
(4)超声速流场的可压缩性以及激波的存在,导致粒子浓度的非均匀分布,对PIV算法的要求很高。
笔者采用纳米尺度粒径的示踪粒子、高精度的同步控制器以及高脉冲能量的激光器,并在速度场计算过程中采用高精度算法,对超声速光学头罩流场的速度分布进行了研究。
1 实验装置与条件
1.1 超声速风洞和模型
实验在如图1所示的Ma=3.8超声速风洞中进行。该风洞是一座吸气式风洞,工作时间可达10s。风洞来流总压为0.1MPa,总温300K。纳米粒子发生器负责示踪粒子的撒播,能够在风洞正常工作时间内向风洞来流中均匀撒播示踪粒子,并可以调节粒子浓度。风洞实验段截面尺寸100mm×120mm,四周均安装有光学玻璃,便于PIV实验的开展。

图1 超声速风洞(Ma=3.8)Fig.1 Supersonic wind tunnel(Ma=3.8)
图2为超声速光学头罩模型示意图,全长160mm。该模型是一个球锥模型,在锥体部分设有光学窗口。当来流以超声速流过光学头罩时,会产生脱体激波,并在光学窗口附近形成复杂的流场结构。

图2 超声速光学头罩模型示意图Fig.2 Supersonic optical bow cap model
1.2 PIV实验装置
图3为PIV系统的示意图。该系统由光源系统、记录系统、同步控制系统和分析系统组成。光源系统为双腔Nd:YAG激光器,可以在很短的时间内发出两束脉宽6ns的激光,经光臂和片光透镜组后形成厚度很薄的片光,照射到感兴趣的流场区域。记录系统是线间传输的双曝光CCD,分辨率为2K×2K,双曝光的时间间隔最短为0.2μ s。同步控制器的时间精度为250ps,可根据计算机发出的指令对激光器与CCD进行同步控制,确保激光器的出光时间与CCD的两次曝光时间相对应。计算机负责设置同步器参数、存储并处理图像数据。实验中,两束激光的时间间隔是0.3μ s,片光平面和模型对称面重合,测量的是模型对称面上光学窗口附近的平面速度分布。
2 示踪粒子跟随性研究
PIV测量的实际是流场内部示踪粒子的运动速度,若示踪粒子能够较好地跟随流体一起运动,那么粒子运动速度分布所反映的就是流动的速度场。因此,测量结果能否如实反映流场的速度分布,很大程度上取决于示踪粒子的跟随性,这也是影响测量精度的主要因素。低速流场PIV测量中大量使用的玻璃球或烟雾粒子尺寸一般在微米量级,响应时间远大于超声速流动的特征时间,导致粒子通过速度梯度很大的区域时过冲,给测量带来很大的误差。经过大量的对比实验,选择名义粒径为18nm的粒子作为超声速PIV实验的示踪粒子。

图3 PIV系统示意图Fig.3 Sketch of PIV system
用斜激波响应实验检验了PIV系统示踪粒子在超声速流场中的跟随性。该实验是在图1所示的Ma=3.8超声速风洞中进行的,实验段来流参数为:Ma1=3.8,P1=874.3Pa,μ1=4.6×10-6N ◦s/m2,V1=669.0m/s,ρ1=0.039kg/m3,T1=77.2K 。 将一个楔角为14.2°的尖劈放置在实验段下壁面,超声速气流遇到尖劈后产生一道角度为27°的斜激波。图4为斜激波响应实验中激波的 NPLS[5](Nano-based Planar Laser Scattering,基于纳米技术的平面激光散射)图像,空间分辨率为31.4μ m/pixel,S和斜激波方向垂直。图5所示为S方向上采用最大灰度值归一化的灰度分布。分析激波前后灰度变化发现,在S方向上经过4个像素(即125.6μ m)的距离,图像灰度完成过渡,即粒子完全跟随流体一起运动。考虑到成像系统的光学传递函数,激波最大厚度为 dsmax=125.6μ m。粒子穿越激波是一个减速过程,沿S方向的波后速度分量V2n=150m/s,因此粒子的最大松弛时间为τpmax=dSmax/V2n=838.2ns。
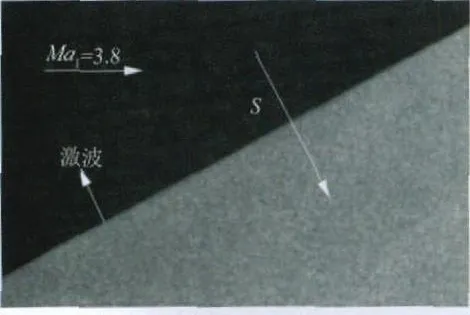
图4 激波前后NPLS图像Fig.4 NPLS image of shock wave

图5 沿S方向的相对灰度Fig.5 Relative grey along S
流场中粒子的动力学性能常用斯托克斯数St表示,St是粒子松弛时间τp与流动特征时间τf的比值。当斯托克斯数St≪1时,粒子有足够的时间去响应流场的变化,否则就无法准确反映实际的流场结构。对于该实验中的光学头罩流场来说,以模型长度作流动的特征长度,流动的特征时间τf=23.92μ s,斯托克斯数St=τp/τf<0.035≪1,因此PIV 系统的示踪粒子跟随性很好,能够在足够短的时间内响应流场的速度变化。
3 PIV速度场测量
超声速流场和低速流场的一个重要区别就是可压缩性效应会导致密度场的空间分布不均匀,若粒子图像没能反映出这种变化,说明粒子不能很好跟随流体一起运动,给测量带来较大误差。在上述实验条件下,采用该超声速PIV系统对超声速光学头罩模型对称面光学窗口上方的流场进行了研究。图6为采集到的粒子图像,从图中可以看出,所使用的纳米示踪粒子较好地再现了激波、膨胀波及边界层等流场结构,湍流边界层的结构也清晰可见。
传统的PIV互相关算法假设查问区内所有粒子的位移是一致的,因此不宜用于如图6所示的存在速度梯度的超声速流场。笔者计算速度场时采用预估校正、超分辨率、窗口变形修正和亚像素拟合[6]等算法。文献[7]表明,图像对间的粒子位移越小,互相关算法的精度越高,位移为零的时候,精度最高[7]。用互相关算法计算图像间的粒子位移,然后将图像对的一个查问区偏移粒子位移的整像素(将以像素为单位的粒子位移取整)大小,那么互相关算法只需测量小于0.5像素的位移,这种称为预估校正的算法能够大大提高计算精度。和预估校正法类似,超分辨率法也通过偏移查问区来计算粒子位移,求得整像素偏移和验证完位移矢量之后,查问区的大小变成了原来的一半。连同整像素偏移一起,对每个更小的查问区进行互相关运算,创建一个空间分辨率更高的速度矢量网格。流动的旋转与剪切变形,使得第一幅粒子图像中的查问区在第二幅图像中弯曲变形,窗口变形修正算法将第二幅图像中对应区域先进行修正,再与第一幅图像中的查问区进行互相关运算,可提高针对这类流动的测量精度[6]。亚像素插值法是寻找互相关平面波峰位置时采用的一种方法,通过拟合曲线来确定波峰位置,以降低离散性带来的较大误差。
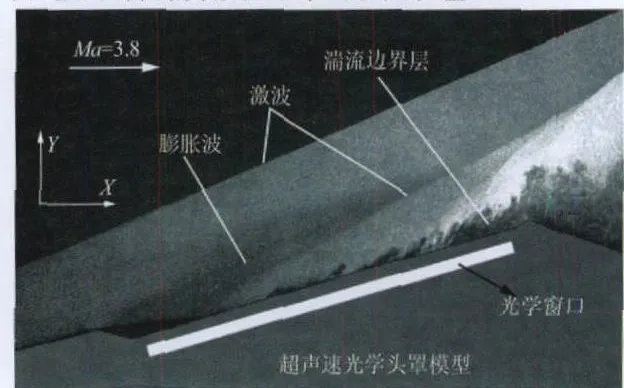
图6 粒子图像Fig.6 Particle image
图7为采用上述算法得到的模型对称面上光学窗口附近的瞬态速度分布,速度场网格间距为1.5mm。图7(a)所示为合速度云图;图7(b)为X方向速度分量U的云图;图7(c)为Y方向速度分量V的云图,图中斜线表示粒子图像中激波的位置;图7(d)为相应的涡量场;图7(e)为速度矢量分布图;图7(f)为流线图。从图7(a)~(c)可以看出,来流区域的速度大小和方向都比较均匀,经过激波后,Y方向的速度分量V突然增大,且速度场所示的激波位置与粒子图像捕捉到的激波位置几乎重合。V的变化改变了速度矢量和流线的方向,如图7(e)和(f)所示。受壁面剪切的作用,靠近壁面的流场区域涡量较大,其它区域的涡量基本为零。综合分析图7(a)~(f)可知,来流经过模型头部产生脱体激波,波后气体流经光学窗口上方时膨胀,之后受光学窗口的压缩,产生一系列压缩波,在光学窗口上方汇聚成一道激波。光学窗口上方复杂的速度场导致了密度场分布的非均匀性,对超声速光学头罩的光学传输性能造成不利影响。由实验结果可以看出:PIV示踪粒子的动力学响应性能良好,能够很好的反映复杂的超声速流场结构;笔者采用的PIV算法对如图6所示的存在高速度梯度的流场有很好的适用性,并能很好地捕捉激波位置,计算结果精度高;所选激光器的能量满足对超声速光学头罩流场速度分布的测量要求。

4 结束语
采用高精度同步器、高能量激光器、纳米级粒径的示踪粒子和高精度速度场算法对超声速光学头罩流场的速度分布进行了PIV研究,并通过斜激波响应实验校准了示踪粒子在超声速流场中的跟随性。综合分析粒子图像和速度场结果表明,选用的示踪粒子对超声速流动有很好的跟随性,高精度速度场算法能够很好的反映超声速光学头罩流场的速度分布,且具有较高的空间分辨率。超声速光学头罩窗口上方流动复杂,存在激波、膨胀波等流场结构,这些都会导致折射率场的变化,进而影响光学传输性能,本文结果为研究超声速光学头罩光学传输机理提供了重要的实验依据。
[1]JUM PER E J,FITZGERA LD E J.Recent advances in aero-optics[J].Progress in Aerospace Sciences,2001,37:299-339.
[2]易仕和,程忠宇,刘大锋.DPIV技术在超声速自由涡气动窗口研究中的应用[J].流体力学实验与测量,2004,18(3):79-82.
[3]MUN~IZ L.Particle image velocimetry studies of turbulent nonpremixed flames[D].Ph.D.Thesis.Stanford University,2002.
[4]URBAN W D.Planar velocity measurements in compressible mixing layers[D].Ph.D.Thesis.Stanford University,1999.
[5]赵玉新.超声速混合层时空结构的实验研究[D].工学博士学位论文.国防科技大学,2008.
[6]GILBERT R A D.Evaluation of FFT based cross-correlation algorithms for particle image velocimetry[D].Ph.D.Thesis.Waterloo University,2002.
[7]WESTERWEEL J,DABIRI D,GHARIB M.The effect of a discrete window offset on the accuracy of cross-correlation analysis of digital PIV recordings[J].Experiments in Fluids,1997,23:20-28.
