基于lab空间和图像形态学的车牌定位算法
2010-04-11何斌张小宁
徐 雷,何斌,张小宁
XU Lei1, HE Bin2, ZHANG Xiao-ning1
(1. 同济大学 道路与交通工程教育部重点实验室,上海 200092;2. 同济大学 电子与信息工程学院,上海 200092)
基于lab空间和图像形态学的车牌定位算法
A method of license plate locating based on lab and mathematical morphology
徐 雷1,何斌2,张小宁1
XU Lei1, HE Bin2, ZHANG Xiao-ning1
(1. 同济大学 道路与交通工程教育部重点实验室,上海 200092;2. 同济大学 电子与信息工程学院,上海 200092)
车牌定位是车牌识别系统LPR的关键技术之一。根据Lab颜色空间b通道特性,本文提出了一种Lab空间下的车牌定位方法。该方法首先针对b通道图像设计了一种判断车牌颜色的算法;之后对不同颜色车牌选取不同的阈值范围进行迭代运算,得到最优分割阈值,并对二值化图像进行形态学处理;最后选取连通域的面积大小、长宽比及灰度跳变次数来筛选出真实车牌区域。实验表明,该方法准确率较高,耗时短,受光照、背景环境影响较小。
车牌定位;Lab空间;数学形态学
0 引言
车牌识别技术LPR(License plate recognition)的研究始于20世纪80年代[1],它的任务是自动采集交通图像,分离出车牌区域,并完成字符的分割与提取。车牌定位、字符分割、字符识别是LPR的三个关键技术,其中车牌区域快速有效的定位,是完成字符分割和识别的基础,定位准确率在整个识别流程中起到至关重要的作用。目前车牌定位的算法主要有基于灰度图的算法[2~4]和基于颜色空间特性的算法[5,6],前者具有时间复杂度小的优点,但遇到光线较暗、光照不均等情况,识别准确率会有所下降;后者利用了颜色通道的特性,受光照等外部环境影响较小,尤其与形态学、小波等数学方法相结合时定位效果较好。
考虑到Lab颜色空间蓝、黄两色分离的特性,本文提出了一种Lab颜色空间下的车牌定位方法。Lab空间b通道存储的是蓝、黄两色的颜色信息,一个像素点的颜色越蓝,在b通道的数值就越小,反之颜色越黄数值越大,这种特性使得选取一个合适的阈值来分割出图像中的蓝、黄车牌能够得以实现。经过大量实验分析,选取一个经验阈值来判断图像中的车牌颜色,对于蓝色和黄色车牌分别限定一个阈值的选取范围,通过迭代确定出最优分割阈值,得到二值图像。不同的原始图像经过二值化和形态学运算后,得到数量不一的车牌候选区域,此时再根据车牌自身特性进行车牌区域的筛选,如面积、车牌长宽比、水平灰度跳变次数等,最终得到唯一的车牌区域。图1为该方法的技术路线。

图1 Lab空间下车牌定位的技术路线
1 b通道分割阈值的确定
摄像机采集到的图像大多是RGB颜色空间的,故首先应将车牌图像由RGB颜色空间转换到Lab颜色空间[7]。
我国的标准车牌由蓝底白字、黄底黑字、白底黑字和黑底白字4种颜色对组成,其中又以蓝底白字的最多,其次为黄底黑字。在Lab颜色空间中,由于蓝色和黄色分居b分量的两头,因此根据b分量的值可以比较容易地判断出是蓝色还是黄色。利用这一特性,对b通道图像选取合适的阈值进行二值化,能够有效的分离出黄色和蓝色车牌区域。
b通道矩阵的数值范围是-128~127,为了在matlab中正常显示图像,需将矩阵中的数据映射到0~255的范围区间。原始图像和转换后的Lab空间b通道图像分别如图2和图3所示。

图2 原始RGB图像

图3 b 通道图像
对于含有蓝色车牌的图像(以下简称蓝牌图像),车牌区域的像素点蓝色饱和度相对较高,在b通道的图像中,车牌区域显示为一个较暗的区域,且与周围像素的对比度较大。而对于含有黄色车牌的图像(以下简称黄牌图像),在b通道图像中车牌区域显示为一个较亮的区域。据此,分别对蓝牌图像和黄牌图像选取一个适当的阈值thB和thY进行二值化,即可把车牌区域较好的分割出来。
由于蓝、黄车牌图像具有不同的统计特性,thB和thY不是像thB=255 - thY这样一种简单的对应关系,应首先将蓝牌图像和黄牌图像区分开来。据此,本文设计了一种区分蓝、黄车牌图像的算法:以一个初始判定阈值th1=50对b通道图像进行二值化,统计二值化图像中黑色像素点的比例,若比例超过了门限值η=0.05,判定此图像为黄牌图像,反之若比例小于门限值η,则判定为蓝牌图像。
此外,为了更好的适应光照、背景条件等环境变化,提高定位精度,本文对分割蓝色车牌阈值thB和分割黄色车牌阈值thY分别设定了一个选取范围,通过阈值迭代的方法来选定最优阈值。经大量实验分析,将thB的范围定为50~80,thY的范围定为110~140。
黄牌图像二值化后车牌候选区域为白色,而蓝牌图像二值化后车牌候选区域为黑色,故还要对后者做一次反向操作,以使车牌候选区域统一为白色,背景统一为黑色,从而有利于后续算法的简化。图3两幅图像的二值化及相应的反向操作结果如图4所示。

图4 b通道图像二值化及相应反向操作结果
2 形态学运算
数学形态学的基本思想是用具有一定形态的结构元素去度量和提取图像中的对应形状,以达到对图像进行分析和识别的目的[8],其基本运算包括腐蚀、膨胀、开启和闭合四种。设g为结构元素,f为输入图像,对二值图像其数学描述为:
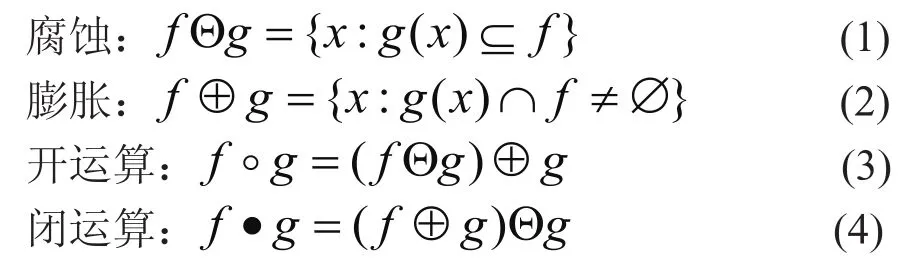
其中开运算可以消除细小物体,闭运算可以填充物体内细小空洞。
经试验分析,本文针对蓝牌图像得到的二值图像进行的形态学运算步骤为:首先用半径为6的disk(圆盘形)结构元做闭合运算,以消除细小物体和不同物体间的细小连接线;再用半径为2的disk结构元做开启运算,以填充车牌区域小的孔洞或断开的区域,使之连成为一个整体;最后考虑到实验中经常出现的车牌区域横向变短的情况,用大小[2,15]的矩形结构元做一次膨胀运算。针对黄牌图像得到的二值图像进行的形态学运算步骤为:用半径为3的disk结构元依次做一次开启和闭合运算。图4的形态学运算结果如图5所示。

图5 形态学运算结果
3 车牌区域筛选
经形态学运算后,得到若干个车牌候选区域,为了得到唯一且正确的车牌区域,需要根据车牌特性进行进一步的筛选。我国汽车牌照具有一些相对固定的几何、颜色特征,如车牌长宽比为固定值、字符和背景对比度较大、车牌区域灰度跳变次数多等。为使算法具有较高的筛选准确率,采取面积大小、长宽比及灰度跳变次数来综合判别车牌区域。
面积大小是指各连通域内白色像素点的个数,面积过小或过大的连通域都可排除出候选区域。根据摄像机与采集点距离的不同,面积筛选的范围也有所不同,应根据具体环境选择合适的面积筛选范围。本文选取的范围为1500~4000,大小不在其间的连通域直接被排除。
我国车牌的长宽比相对固定,一般在3~4之间[2],考虑到形态学运算过程中连通域的大小会发生一定变化,故限定筛选范围为2.5~4.5,长宽比不在其间的被排除。
此外,根据车牌字符和背景对比度较大的特性,对经过前两步筛选后剩余的每个连通域依次进行如下操作:1)在原彩色图中剪切出对应区域并灰度化;2)对灰度图进行水平梯度运算;3)选取图像的中间一行检测灰度跳变次数,若大于14则判定为车牌区域,反之排除该连通域。
图5的车牌区域筛选结果如图6所示,最终车牌定位结果如图7所示。

图6 对车牌候选区域的筛选结果

图7 最终车牌定位结果
4 实验结果与分析
算法的实验平台为matlab7.0,选取在路边同一地点随机拍摄的89幅车牌图像进行测试(测试前将车牌图像大小归一化为300*400),定位结果如表1所示。

表1 实验结果
蓝色车牌图像有4幅未定位,其中有2幅是车、牌同色,且车牌没有金属边框,这种情况下在b通道图像中车牌区域和车身连为一体,使得二值化过后车牌区域与周围背景合成一个大的连通域,这样在后续的面积筛选步骤中该区域就被筛选掉了,无法实现准确定位。另有两幅图像未成功定位的原因是车牌区域污染严重,粘着大量泥土导致车牌颜色饱和度降低,且字符与车牌背景的对比度减小,这使得对b通道二值化的过程中在整个阈值选取范围内无法找到最优阈值,并且在灰度跳变筛选车牌区域这一步,有可能使得统计得到的灰度跳变次数不满足要求,从而定位失败。
黄色车牌有2幅未定位,经分析,其原因可认为是照相机曝光参数(光圈、感光度ISO)与拍摄其他图像时的曝光参数不一致,致使无法准确判别是否为黄色车牌图像。显然,针对不同的天气、光照和道路环境,判别蓝、黄车牌的门限值也不尽相同,需根据具体条件进行调整。
5 结论
Lab颜色空间的b通道图像能够很好的区分蓝、黄两种颜色,我国大部分车牌为蓝底白字和黄底黑字,故基于Lab空间的车牌定位算法具有较高的实用性。
该算法优点主要有:算法的实现基于Lab空间的b通道颜色特性,因此受光照条件影响较小;L通道和a通道的数据被忽略,故算法的执行时间较短,大体上与基于灰度图的算法相同;与灰度图二值化得到的图像相比,b通道二值化得到的图像干扰因素较少,大部分图像经面积筛选和长宽比筛选后,即可定位到车牌区域。
当然,算法对于车身、车牌同色,并且车牌没有明显金属边框的情况,在二值化过程中车牌区域与背景容易连接在一起,从而无法实现准确的定位;此外,在不同的光照、道路环境条件下,对于判别蓝、黄车牌的阈值th1的选取并不相同,只能对具体环境下采集到的车牌图像进行统计后得到。车、牌同色的定位和自适应阈值将是进一步研究的重点。
[1] 李孟歆,吴成东.基于分级网络的车牌字符识别算法[J].计算机应用研究,2009,26(5):1703-1705.
[2] 陈虹,陈蕾,蒋毅.基于边缘检测及数学形态学的快速汽车车牌定位[J].交通与运输,2008(12):78-81.
[3] 邹晔.基于纹理分析和梯度特征的车牌定位算法[J].科技广场,2009(5):109-111.
[4] 韩丽萍,药春晖,张文格,等.基于小波变换与形态学的车牌定位方法[J].测试技术学报,2006,20(1):46-49.
[5] 王学伟,薛迎卫.XYZ空间与小波能量特征融合的车牌定位[J].北京化工大学学报(自然科学版),2010,37(1):122-125.
[6] 王枚,王国宏,潘国华.基于HSV空间的车牌定位方法[J].烟台大学学报(自然科学与工程版),2007,20(1):48-52.
[7] Lianghai Jin,Dehua Li.A switching vector median filter based on the CIELAB color space for color image restoration[J].Signal Processing,2007,87:1345-1354.
[8] 史忠科,曹力.交通图像检测与分析[M].北京:科学出版社,2007.
TP391
A
1009-0134(2010)10(上)-0011-04
10.3969/j.issn.1009-0134.2010.10(上).03
2010-03-06
徐雷(1987 -),男,河南济源人,硕士研究生,研究方向为图像处理与模式识别。
