测量机器人自动化测量技术在桥梁监测中的应用
2010-03-30王明权朱清海
王明权,朱清海
(重庆市勘测院重庆400020)
测量机器人自动化测量技术在桥梁监测中的应用
王明权,朱清海
(重庆市勘测院重庆400020)
介绍了测量机器人ATR技术原理和自动化测量技术的二次开发理论,并详细阐述了测量机器人自动化测量技术在桥梁监测中的应用。
测量机器人;ATR;自动化测量技术;桥梁监测
1 测量机器人ATR技术原理
测量机器人(Survey robot)是一种能代替人进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪。它是在全站仪基础上集成步进马达、CCD影像传感器构成的视频成像系统,并配置智能化的控制及应用软件发展而形成的。
测量机器人采用了自动目标识别技术ATR(automatic target recognition),实现了普通棱镜长距离自动识别与精确照准,为测量机器人自动化测量奠定了基础。其工作原理如图1和图2,通过CCD影像传感器构成的视频成像和其他传感器对现实测量世界中的目标进行识别,迅速做出分析、判断与推理,实现自我控制,并自动完成照准、读数等操作。
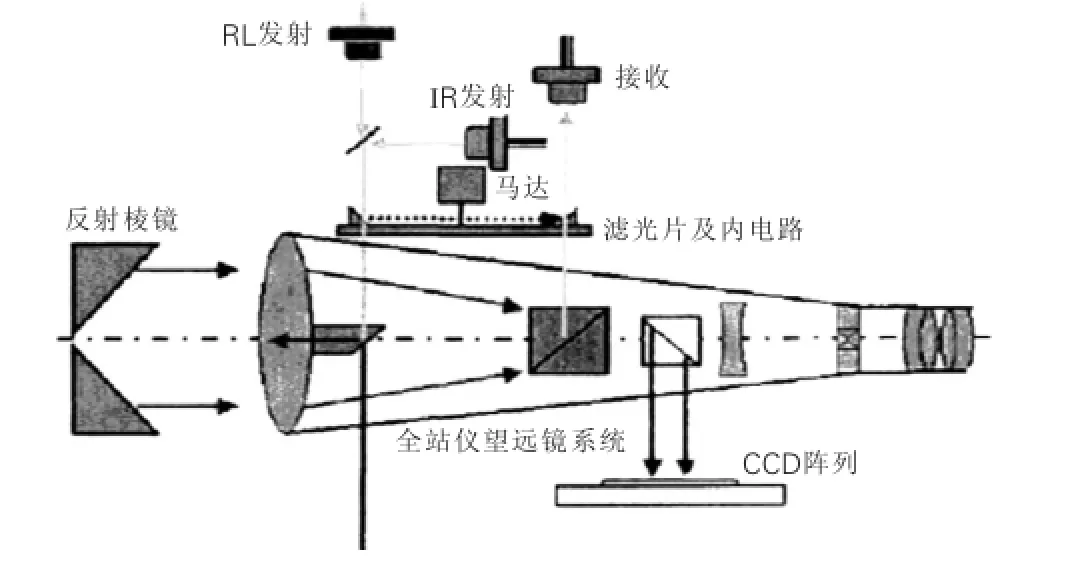
图1 ATR工作原理图
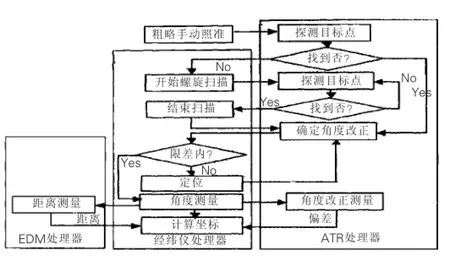
图2 ATR工作流程图
2 测量机器人自动化技术的二次开发
在桥梁监测中,多采用全站仪测边测角方法对变形点进行观测,获取其几何位移量的变化。通常采用人工观测,存在观测量少,其观测精度受人为因素影响较大,作业效率低下的缺陷。为了实现桥梁监测的自动化,在测量机器人ATR技术上,结合桥梁监测的技术,开发适合桥梁监测的自动化技术。
测量机器人支持GeoBasic、GeoC++的二次开发,软件内置在测量机器人上,通过调用其内部提供的函数可实现测量机器人自动观测和数据的存储等功能,结合后期的数据处理平台实现监测数据的分析和处理。这种机载软件模式仅实现测量机器人自动化采集功能,未实现实时的数据处理和分析,适用于恒载条件下的桥梁监测。
测量机器人提供了外部串行接口,通过GSI接口与指令,实现仪器内部参数的设置、读取,实现向仪器输入、输出观测数据;通过GeoCom接口,实现客户端(外部应用程序)与服务器(测量机器人)的相互响应。这就为开发桥梁自动化监测系统提供了条件,实现实时自动化采集与数据处理,结合通讯技术,可对桥梁实现远程无人值守的监测,适用于实时连续桥梁监测。
3 机载自动化技术在桥梁监测中的应用
3.1 外业数据采集
机载自动化技术的系统流程见图3。
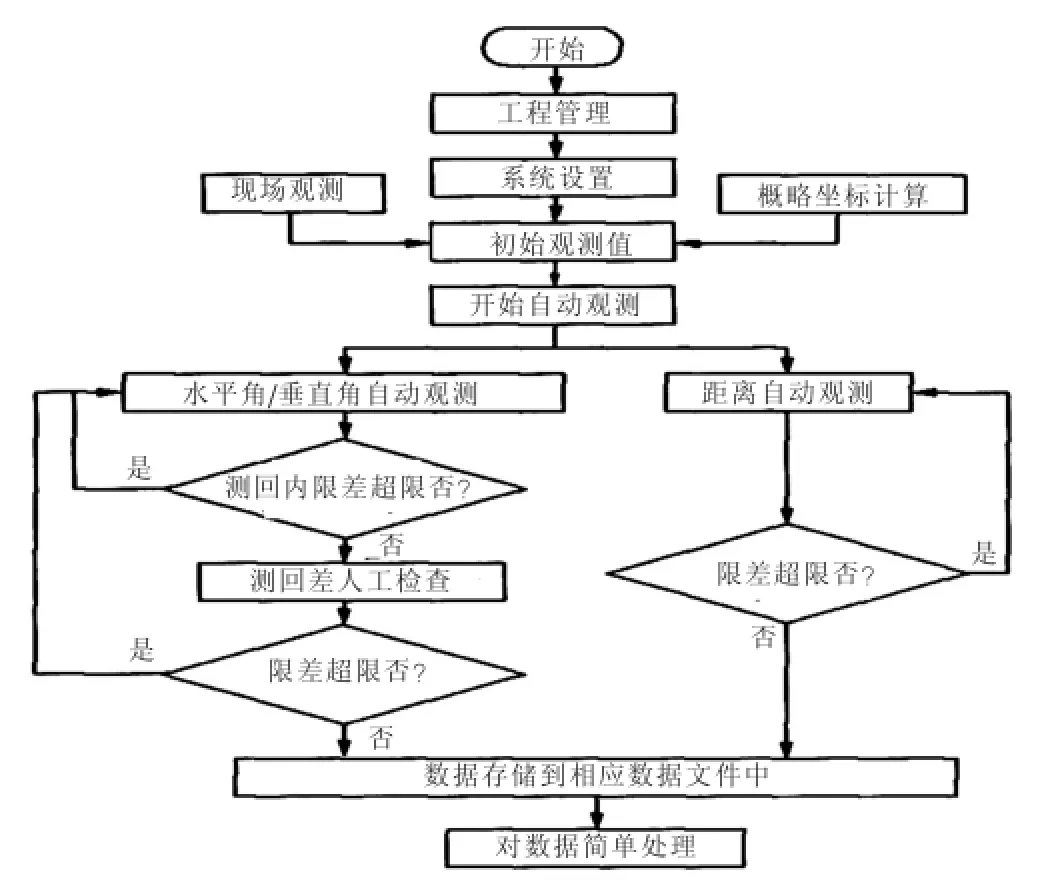
图3 机载自动化技术系统流程图
系统采用GeoBasic为开发环境,以Leica TCA2003为载体,共设置八个模块,分别为工程管理、测量限差设置、初始化测量、测站设置、定向设置、自动观测、角度测回差检查、自动测距离,其界面如图4所示。

图4 机载自动化技术系统主界面
在自动观测过程中,软件自动根据设置的限差进行观测精度控制,超限时自动给出提示并进行重测,在观测条件发生变化无法找到目标时给出重试和人工观测的选择,从而保证了观测的有序进行,同时也保证了数据的可靠性和及时性。
3.2 内业数据处理
内业自动化数据处理软件采用数据库技术存储与管理数据,将各个测站的数据导入到一个统一的工程中进行管理,包括对各站数据进行整理、检查、测站平差及将合格的角度、距离数据按规范规定的格式以标准外业手簿的形式自动输出报表。其处理结构见图5,界面见图6。

图5 数据处理结构图

图6 机载自动化技术的数据处理界面
4 远程控制自动化技术在桥梁监测中的应用
远程控制自动化系统基于GeoCOM应用开发接口,通过网络技术实现远程实时控制测量机器人进行自动变形监测,以及对监测过程中所采集的数据进行管理与处理的软件系统。其系统构成如图7所示。

图7 监测系统组成框图
系统基于网络通讯技术与野外测量机器人建立连接,通过室内计算机进行工程管理、系统设置、制定观测计划,控制测量机器人进行观测,并实时获取观测数据,进行数据分析、图表绘制、报表输出、超限报警,实现真正的无人值守观测,提高了工作效率,降低了劳动强度与作业风险,能为桥梁健康安全监测提供保障,其系统主界面如图8所示。
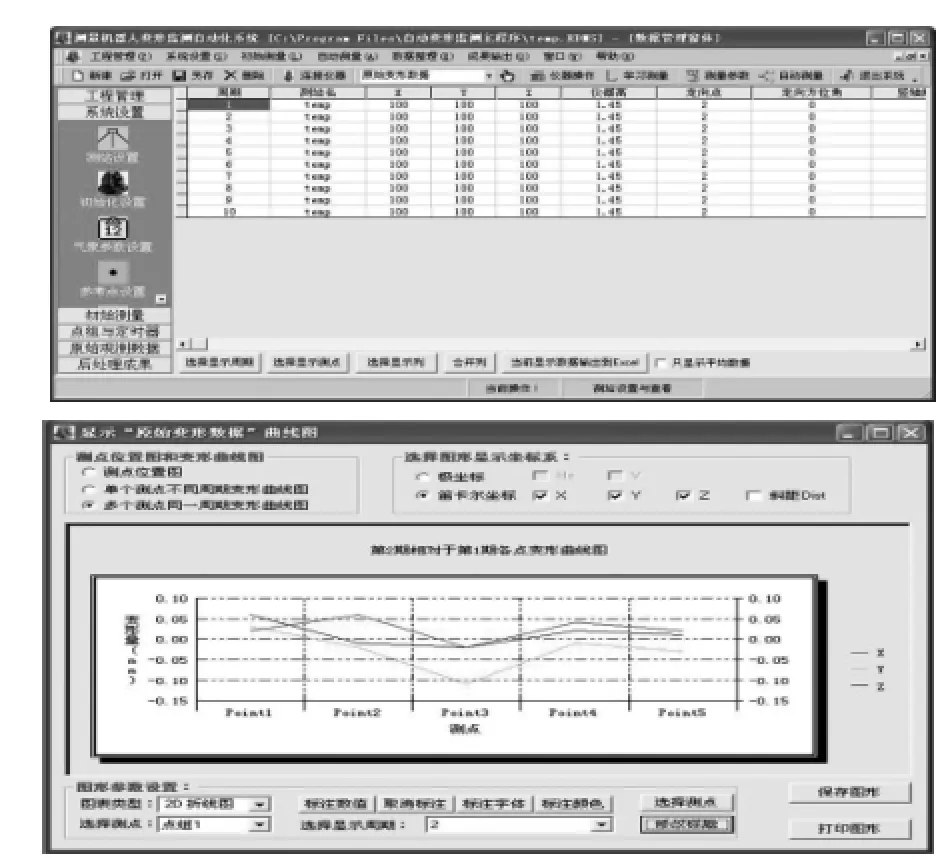
图8 远程实时控制监测系统界面
5 观测精度比较
为了了解测量机器人自动化测量技术的精度,对重庆某桥变形点进行水平角观测,并与人工观测的数据进行比较,其比较结果见表1、表2。
从表1可知,其最大水平角较差为1.75″,满足规范要求,表明机载自动化测量技术的观测精度能满足桥梁健康安全监测的要求。
从表2可知,其最大水平角较差为1.33″,满足规范要求,表明远程控制自动化测量技术的观测精度能满足桥梁健康安全监测的要求。
6 结束语
测量机器人自动化测量技术观测精度可靠,满足规范要求,适用于桥梁健康安全监测。特别是基于测量机器人远程控制自动化技术实现了自动化观测、智能化控制功能,可实时进行数据传输、数据分析、图表输出、超限报警,实现无人值守观测,提高了工作效率,降低了劳动强度与作业安全风险,能为桥梁的健康安全检测提供可靠保障。
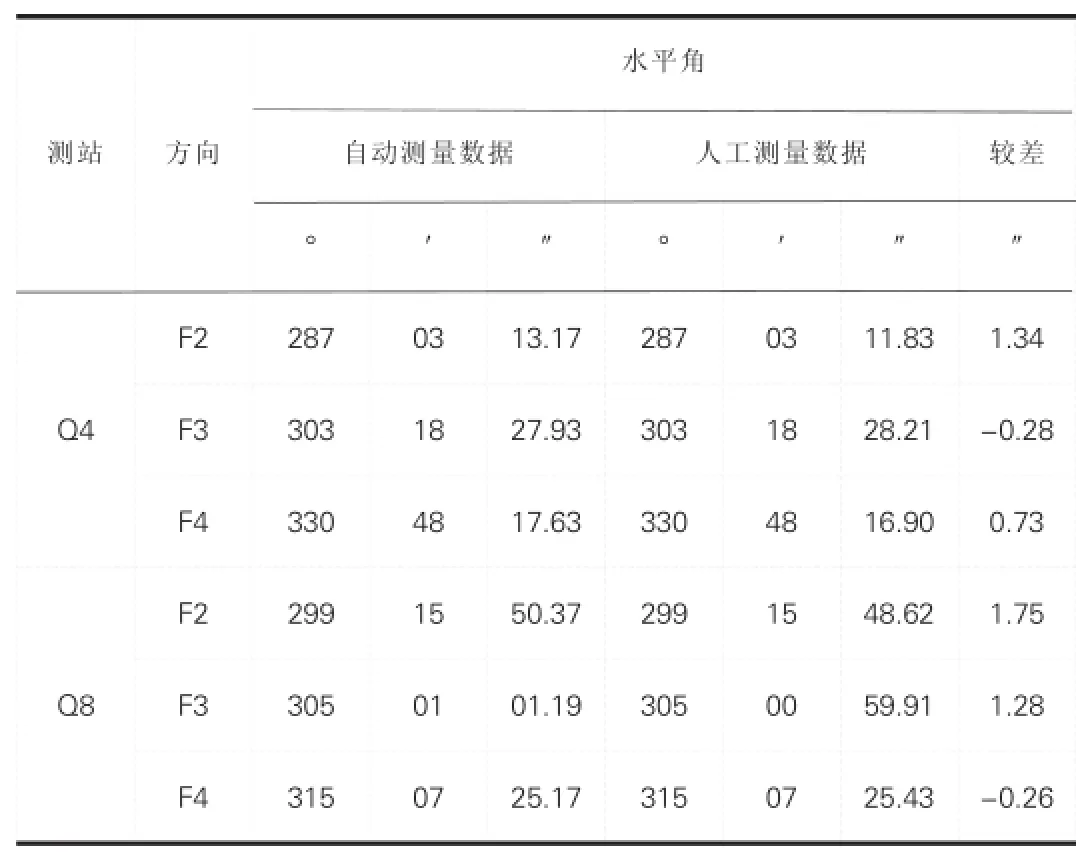
表1 机载自动化测量技术测量数据与人工观测数据比较表
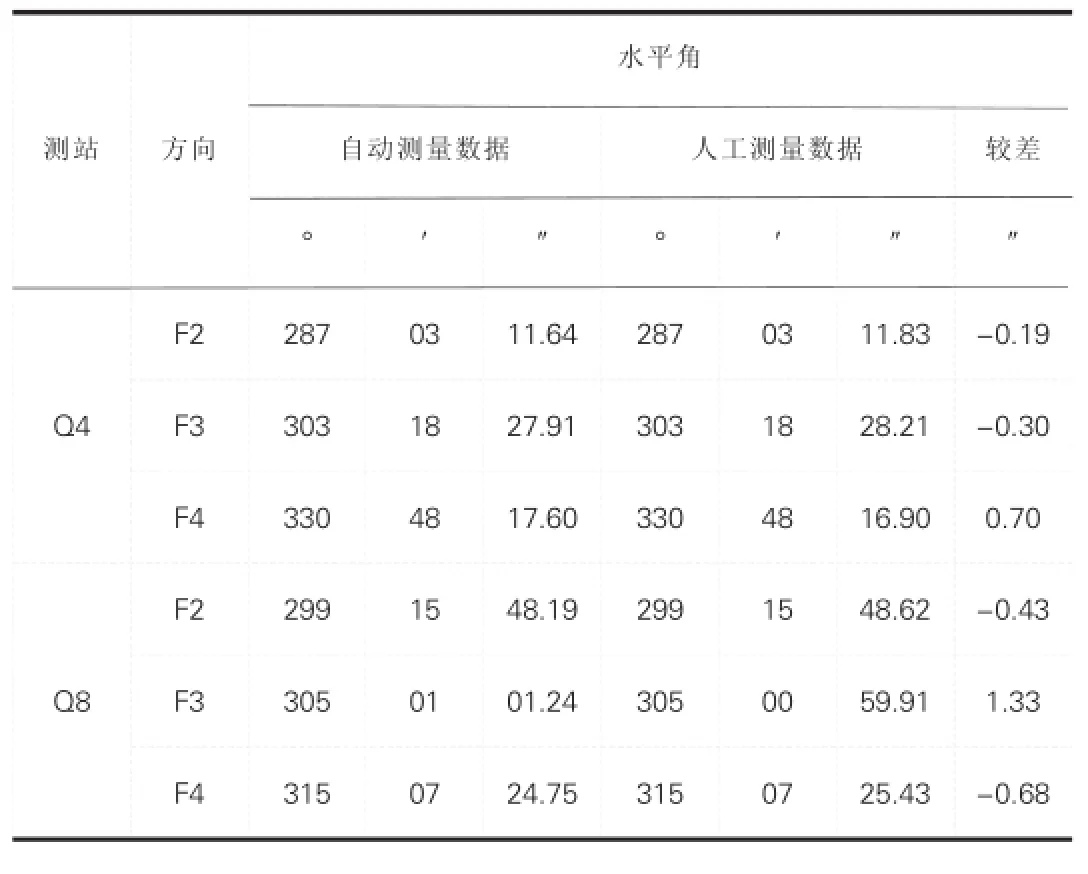
表2 远程控制自动化技术测量数据与人工观测数据比较表
[1]张正禄.测量机器人介绍[J].测绘通报,2005,(5):17.
[2]郭际明,梅文胜,张正禄,黄全义.测量机器人系统构成与精度研究[J].武汉测绘科技大学学报,2000,25(5):421-425.
[3]梅文胜,张正禄,郭际明,黄全义.测量机器人变形监测系统软件研究[J].武汉大学学报,2002,27(2):165-171.
责任编辑:余咏梅
Application of Automation Measurement Technology of Survey Robot in Bridge-Monitoring
This article describes the principle of ATR measuring technology of Survey Robot and automation measurement theory of its Secondary Development,and detailed applications of automation measurement of survey robot in bridge-monitoring are expounded in the full text.
survey robot;automatic target recognition;automation;measurement technology;monitoring of bridges
TU18
:A
:1671-9107(2010)10-0046-03
10.3969/j.issn.1671-9107.2010.10.046
2010-6-24
王明权(1972-),高级工程师,主要从事测绘技术、质量管理工作。
