旋转导向钻井稳定平台串级模糊控制方法研究*
2010-01-05霍爱清袁立志黄海勇
霍爱清 葛 蕾 袁立志 黄海勇
(1.西安石油大学陕西省钻机控制重点实验室 陕西西安) (2.川庆钻探工程有限公司长庆钻井总公司 陕西西安)(3.中海石油(湛江)有限公司文昌13-1/2油田作业公司 广东 湛江)
旋转导向钻井稳定平台串级模糊控制方法研究*
霍爱清1葛 蕾1袁立志2黄海勇3
(1.西安石油大学陕西省钻机控制重点实验室 陕西西安) (2.川庆钻探工程有限公司长庆钻井总公司 陕西西安)(3.中海石油(湛江)有限公司文昌13-1/2油田作业公司 广东 湛江)
通过对旋转导向钻井稳定平台控制原理的深入研究,提出了采用串级模糊算法对稳定平台控制的方法。并设计出二维模糊控制器,确定了模糊变量的隶属度函数及控制规则,且利用MATLAB软件进行了仿真研究,仿真试验表明稳定平台串级模糊控制对钻井参数在较大范围内变化以及负载扰动对平台的影响,具有良好的稳定性、自适应性、鲁棒性且抗干扰能力强。
串级模糊控制;稳定平台;MATLAB仿真
0 引 言
旋转导向钻井技术具有机械钻速和井身轨迹控制精度高、井眼净化效果好、位移延伸能力强等特点,是导向钻井技术一次质的飞跃[1]。旋转导向钻井工具的开发与应用能有效降低油气开发成本、提高油气采收率。稳定平台是旋转导向钻井工具的核心环节,对其控制的成功与否直接关系到旋转导向钻井工具研制的成败。目前,虽然传统的PID控制对固定输入已经有很好的控制效果,但钻井过程中的钻井液脉冲压力不可能保持为一个固定值,由此会带来过程对象模型的某些不确定性[2、3]。因此,设计中要充分考虑到系统的鲁棒性和自适应性。于是需在控制中加入智能控制以确保系统的各项性能指标。
本文根据工程上对稳定平台的要求,提出了用串级模糊控制算法控制稳定平台系统,试验结果表明该控制方法具有较强的抗干扰能力及良好的鲁棒性。
1 稳定平台串级模糊控制系统原理
1.1 串级控制系统的基本原理
串级控制系统的基本组成如图1所示。

图1 串级控制系统的基本组成
图1中主被控量c1为稳定平台工具面角,也称主参数;副被控量c2为平台旋转速度,也称副参数。主被控量和副被控量通过对应的测量装置及控制器构成双闭环控制。副被控量的控制回路在内,其输入信号就是主控制器的输出,而副控制器的输出就直接控制调节阀,这两个控制回路称为内环和外环[4、5]。实验中,外环控制将采用模糊控制,内环控制选取传统的
PID控制。这样既能保证平台随动的精度,又能使稳定平台有较强的自适应性。
1.2 模糊控制器设计
设计采用二维模糊控制器,该控制器以E和E的导数Ec为输入,u为输出。实验中E为稳定平台工具面角α,Ec为平台旋转速度ω,u为扭矩发生器驱动电压信号。它们的论域分别界定为7个等级。语言模糊集取(NL,NM,NS,ZE,PS,PM,PL),其中的简记形式含义分别为:负大、负中、负小、零、正小、正中、正大。三个量均选用三角形隶属度函数。控制器模拟推理采用Mandani法。α、ω和u均采用线性划分,其中α隶属度函数。
模糊控制规则如下:
当转速值较大时,只做降速控制,基本不考虑实时角位置的测量值。因为即使是偏差角等于零时,只要转速不等于零,系统的动态过程也不能算完成。
当转速为零时,系统只按偏差角调整。使对象根据α的符号从规定方向趋近给定角。
当转速较小时,需根据ω、α综合考虑控制输出的变化。特别要注意这两个量之间的符号关系,并按以下思路区别对待。ω和α同号时,旋转运动正在使偏差角增加,控制量输出要与输入反号且尽可能取较大值。使对象尽快降速,力争能在该转向半周内使ω为零甚至反向。若ω和α符号相反,说明现在偏差角正在减少,可适当地减少降速作用,可以利用小转速转动提高对象响应时间。降速的减少程度可根据系统的多个动态指标综合调整。随着α的减少,可适当增加一些减速作用以减少超调角度。
系统工作时可根据输入的α和ω查询模糊控制规则表并自动决定输出u的大小。
2 系统仿真试验
2.1 系统模型的建立
为了使稳定平台能快速跟随设定的工具面角,将稳定平台的控制轴稳定在所需工具面角的位置,本实验设计串级控制方法,即位置负反馈环为外环和速度负反馈环为内环。位置负反馈环通过偏差信号控制工具旋转,使导向工具达到设计的工具面位置;速度负反馈环主要是检测平台旋转速度,从而保证稳定平台的工作状态。

2.2 串级模糊控制性能分析
在MATLAB中,用FUZZY工具箱构造模糊控制器,并在Simulink中组建出稳定平台串级模糊控制系统的Simulink仿真模型,如图2所示。
通过仿真试验,得到稳定平台串级模糊控制系统的响应曲线如图3(a)所示。图中同时对比了双PID控制稳定平台时的响应曲线。

图2 串级模糊控制系统仿真模型
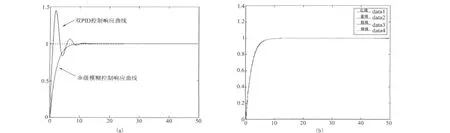
图3 稳定平台系统串级模糊控制相应曲线
由图3(a)的仿真结果可一看出稳定平台串级模糊控制系统的性能指标为:调节时间ts=10 s,超调量几乎为零,稳态误差ess=0;双PID控制的性能指标为:调节时间ts=17 s,超调量σ%约为45%,稳态误差ess=0。通过两者的仿真结果可以看出,采用双PID控制调节时间长且有较大的超调量,而采用串级模糊控制的系统则有调节时间短,零超调,稳态误差为零,反应时间较快的优点,因此采用串级模糊控制稳定平台系统可以有效提高系统动态响应。
稳定平台串级模糊控制系统在实际使用中,控制对象模型参数会发生变化,若f变化10%,f=0.165,则有km=6.06,Tm=0.067,系统响应曲线如图3(b)中绿线所示。若f变化20%,30%系统响应曲线如图3(b)中蓝线和棕线所示。考虑系统中存在非线性延时,延时时间为0.2 s,系统响应曲线如图3(b)中红线所示。由图3(b)可以看出,改变系统模型参数,四条响应曲线基本重合在一起,说明串级模糊控制的导向钻井稳定平台有很好的自适应性,对模型不确定性有很好的鲁棒性。
2.3 前馈控制试验
前馈控制通常取某一主要扰动信号作为补偿信号,它与反馈调节原理完全不同,是按照引起被调参数变化的干扰大小进行调节的。这种调节系统中要直接测量干扰量的变化,当干扰刚刚出现而能测出时,干扰补偿器就能发出调节信号使调节量作相应的变化,使两者抵消于被调量发生偏差之前,从而使系统更具有稳定性[6]。
在钻井时井下的情况复杂,除了工具自身产生的模型参数变化外,其它各种各样的扰动随时都有可能产生,如钻机憋钻、卡钻、岩层的性质导致钻头的受力不均匀,钻井液压力、排量波动等。由于电流大小可以反映负载变化对稳定平台的影响,是一个主要的扰动信号,故而选取该信号作为前馈信号,构成电流前馈控制系统。
在仿真试验中,分别以常数信号、脉冲信号、随机信号来代表各种可能的扰动,对系统进行抗干扰能力的仿真研究,仿真结果依次如图4中的(a)、(b)、(c)。
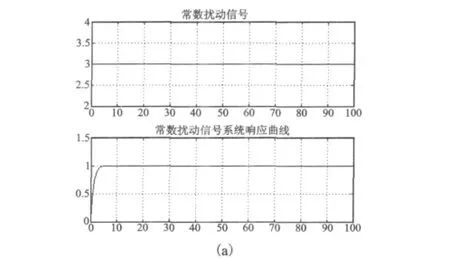
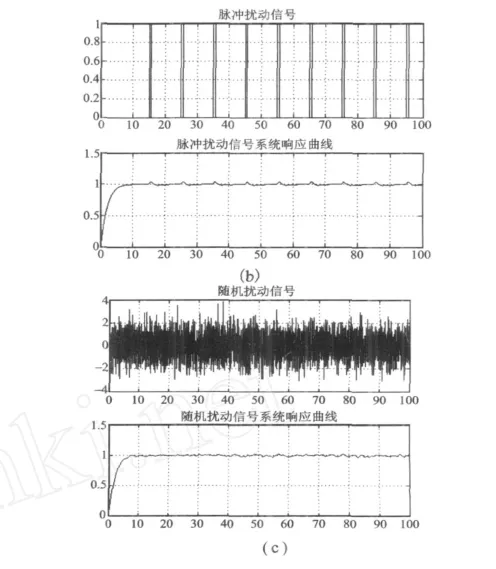
图4 干扰信号及其系统响应曲线
仿真表明,用串级模糊控制稳定平台系统能很好的达到控制要求,针对多种干扰,系统的波动很小,能够很快的进入稳定运行状态,控制效果良好。
3 结 论
本文通过对稳定平台串级模糊控制系统的性能分析以及对各种扰动信号的仿真,表明采用串级模糊控制方法对实现稳定平台控制具有设计简单、系统鲁棒性及抗干扰能力强等特点。且对加入电流前馈补偿串级模糊控制,能有效地抑制由负载变化引起的不确定性因素的影响,达到了稳定平台控制的目标。
[1] 韩来聚,王瑞和,刘新华,等.调制式旋转导向钻井系统稳定平台控制原理及性能分析[J].石油大学学报(自然科学版),2004,28(5)
[2] 汤 楠,穆向阳.调制式旋转导向钻井工具稳定平台控制机构研究[J].石油钻采工艺,2003,25(3)
[3] 汤 楠,霍爱清,崔琪琳.基于状态空间法的旋转导向钻井工具控制系统研究[J].石油学报,2004,25(2)
[4] 崔琪琳,张绍槐,刘于祥.旋转导向钻井系统稳定平台变结构控制研究[J].石油学报,2007,28(3)
[5] 王正林,郭阳宽.过程控制与Simulink应用[M].北京:电子工业出版社,2006
[6] 陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998
Cascade fuzzy algorithms research of stabilized platform in rotary steering drilling system.
Huo Aiqing,Ge Lei,Yuan Lizhi and Huang Haiyong.
The control principle of the servo platform in rotary steerable drilling system was studied.To control the stabilized platform,cascade fuzzy algorithms is presented.A two-dimensional fuzzy controller is designed,the fuzzy variable degree of membership function and the control rule are determined,and the simulation research using the MATLAB software is studied.The simulation showed that stabilized platform using cascade fuzzy control system on a wide range of parameters change,disturbance and load disturbance parameters such issues,has a good stability,adaptability,robustness and anti-jamming capabilities.
Cascade Fuzzy Algorithms;Platform Stabilization;MATLAB Simulation
TE242
B
1004-9134(2010)01-0004-03
陕西省自然科学基金资助项目(SJ08E216)和中国石油天然气集团公司中青年创新基金资助项目(07E1014)
霍爱清,女,1966年生,副教授,现任教于西安石油大学,研究方向:模糊控制、变结构控制及导向钻井控制。邮编:710065
2009-07-06编辑梁保江)
PI,2010,24(1):4~6
·开发设计·
