车辆电控式液压转向系统动态特性仿真与分析
2009-06-17陈绍
陈 绍
摘要:利用液压控制理论和MSC.EASY5仿真系统,以某型三轴车辆液压动力转向系统为例,仿真车辆电控式液压动力转向系统的动态特性,仿真结果为设计液压动力转向机构提供理论依据。研究结果表明:提高系统的压力可以提高系统的响应灵敏度,但增加负载对系统的影响不大;高速时液压系统对车辆横摆角速度的影响明显,使系统有明显的振荡,低速时对车辆的横摆角速度的影响并不明显。
关键词:液压转向系统;动态特性;MSC.EASY5仿真
中图分类号:U463文献标识码:A 文章编号:1009-2374(2009)05-0007-02
车辆液压转向系统的动态仿真对于改进液压动力转向系统的设计,提高液压转向系统的可靠性都具有重要意义,本文将运用MSC.EASY5软件包,以某型三轴车辆液压动力转向系统为例,建立电控液压转向系统动态模型,并对系统的动态响应进行仿真和分析。
一、电控式液压转向系统原理
电控液压转向系统是指采用电子控制,以液压缸作为执行机构的车辆转向系统,它主要由传感器、电控单元、控制阀、动力油缸等组成。系统中计算机根据前轮转角传感器收集前轮转角信号,依照预定程序计算出整车达到最佳行驶轨迹时后轮最佳转角,然后通过比例液压装置控制转向油缸,同时计算机通过后轮转角传感器采集后轮实际转角信号,通过与理论计算值比较进而对后轮转角进行跟踪补偿控制,保证整车按驾驶员意图正确行驶。
二、转向系统仿真与分析
(一)仿真环境介绍
MSC.EASY5是波音公司几十年工程实践的结晶,它可以用来建立动态系统模型,同时对其进行仿真分析。EASY5具有完善的图形化建模环境、强大的仿真分析能力和连接其它多种工程软、硬件的开放结构,可以用来仿真各种由微分、差分和代数方程描述的动态系统,可以有效地帮助用户对各类系统进行参数选定、功能评价、响应分析或控制逻辑设计等。
(二)转向系统仿真模型建立
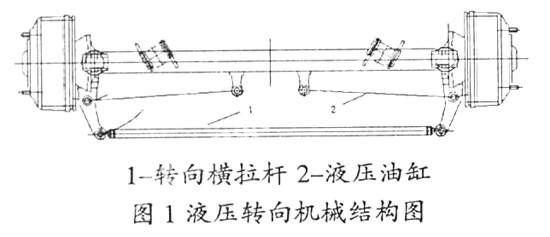
以某型三轴车辆液压转向系统为建模对象,液压转向机械结构如图1所示。两个液压缸由梯形机构相连接。所有转向轮由同一个液压泵供油,溢流阀控制系统的压力。各个转向机构的转向液压缸由单独的比例阀进行控制。
液压转向系统其实就是通过一系列阀门的通断、开度大小、阀芯位移等来控制液体的压力、流量、温度等来实现转向系统的稳定性。本文在EASY5软件平台上来模拟当输入转角信号改变时真实流体的压力、质量流量等的变化,研究系统的稳定性和可行性。
在EASY5集成环境中,从液压库(Hydraulic Library)hb及共用库(General Purpose)gp等库中选取以下组件(Component)添加到工作区里:FP(流体属性)、PH(泵)、RF(安全阀)、TN(油箱)、VG(比例阀)、AC(油缸)、T1(时间函数)、GB(控制器)、LA(惯性环节)、MC(求和器)、Spring(弹簧)等器件,并将各组件连接成如图2所示:
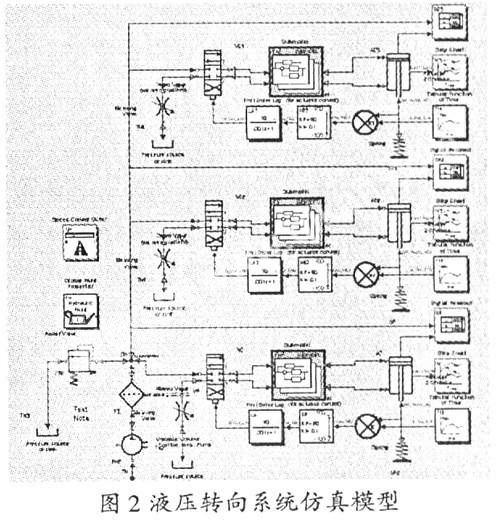
在图2所示的液压系统仿真模型中,溢流阀RF作为安全阀使用,调节系统压力,使系统避免高压出现,延长系统液压元件的运行寿命。T1为输入的信号,经过加法器MC,PI控制器,惯性环节LA,来控制换向阀VG阀芯的运动。换向阀VG属于典型位置控制系统,阀体与液压缸固结在一起,构成了反馈控制。在控制过程中,首先由计算机给定输入指令,推动电液比例阀的阀芯,液压油进行液压缸,推动其运动。液压缸的输出位移和输出力能够不断地回输到阀体上,与滑阀的输入位移相比较,得出两者之间的位置偏差,即滑阀的开口量。由于开口量的存在,油源的压力油就要进入液压缸,驱动液压缸运动,由于反馈的存在,使阀的开口量(偏差)减小,直至输出位移与输入位移相一致时为止。可以看出,这个系统就是利用反馈得到偏差信号,控制液压能源输入系统的能量(流量和压力),使系统向着减小偏差的方向变化,从而使系统的实际输出与希望值相符,即以偏差来消除偏差。轮胎阻力由弹簧代替(弹簧刚度为1200N/cm)。在建模过程中,为了增加仿真的可操作性和简洁性,对控制液压缸压力的液压元件进行包装,组成一个新的液压元件,它是由溢流阀组成。它的作用是调节进入液压缸的压力,对液压缸起到保护的作用。
(三)系统仿真结果与分析
点击仿真按钮,进行仿真。根据实际的仿真效果,可以适当调节仿真步长,观察液压缸的动作顺序及相应速度,在仿真过程中,三组液压缸可以同时动作,各个液压缸都有相应的比例阀控制。
当输入函数为阶跃函数时,在1s时同时给一桥、二桥、三桥一个转向信号,在3s时达到转向要求。通过PID控制和惯性环节来控制比例方向阀的开口,控制液压油缸的活塞位移,以达到转向的目的。由于每个桥的转向半径不同,所以每个桥的液压缸的活塞位移也不同。
对液压系统模型进行仿真分析,通过控制系统比例阀阀芯的位移来控制油缸活塞杆伸缩运动。在时间0~1s过程中,阀开口关闭,活塞杆件不运动,在1~3s中,阀口开启,活塞趋于线性运动;在3~10s中,活塞位移趋于稳定。
由于每个桥在转向时的转向半径在变化,所以要求输出的控制信号也变化,来达到转向的目的,当车辆转弯时,方向盘给一个输入信号,活塞位移作为反馈信号,控制每个桥的转向半径。在开始时,比例方向阀的阀芯处于中位,没有液压油流过,液压油液体经过安全溢流阀流回油箱,所以活塞位移为零。溢流阀起安全阀调节系统压力的作用。当在1s时方向盘给一个转角信号,阀口慢慢打开,流量变大,活塞开始运动,进入液压缸的压力突然增大,由于有位移反馈,活塞始在处于震荡,但震荡的幅度不大,符合实际情况。
1.系统压力与负载压力的变化。在不同系统供油压力和不同负载压力的情况下,输入转向信号(阶跃信号)来分析活塞杆位移的变化曲线。当系统的供油压力由18MPa升到22MPa,弹簧的弹性刚度为1200N/cm时,系统的动态相应曲线如图3(a)、(b)所示。当系统供油压力为18MPa,弹簧弹性刚度增加到1800N/cm时,系统的动态相应曲线如图3(b)、(c)所示:
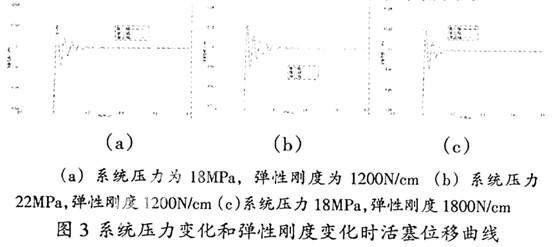
从上图可以看出,当系统压力提高时,系统响应上升时间缩短了0.0021s,提高了系统的响应灵敏度。而当负载压力增大时,响应上升时间略有增加,超调量减小,即系统的响应灵敏度略有下降。
2.液压系统对整车性能影响。以三轴车辆为例对液压系统进行验证,阶跃信号为输入,进行仿真分析,分析液压对车辆动态特性的影响,高速时取速度50km/h,低速时取速度20km/h。结果如图4所示:
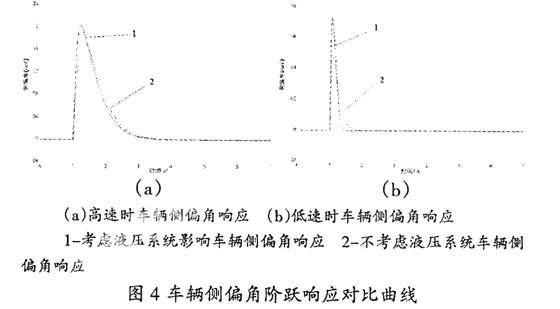
由图4以看出,无论在低速和高速时,车辆侧偏角超调量都有所增加,这是因为增加液压系统使系统的阻尼变小,产生了一定的振荡,但过渡时间并没有加大的变化,且液压系统并没有改变车辆的稳态特性。
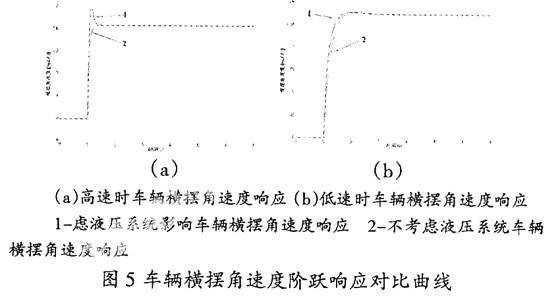
由图5可以看出,高速时液压系统对车辆横摆角速度的影响非常明显,使系统有明显的振荡;低速时液压系统
对车辆的横摆角速度的影响并不明显,没有改变其稳态值。
三、结语
本文通过Esay5建立某型三轴车辆电控液压转向系统模型,并通过仿真研究,分析了系统压力和负载的变化对系统的影响规律,以及液压系统对整车性能的影响。结果表明,提高系统的压力可以提高系统的响应灵敏度,但增加负载对系统的影响不大;另外,高速时液压系统对车辆横摆角速度的影响明显,使系统有明显的振荡,低速时对车辆的横摆角速度的影响并不明显。
参考文献
[1]张利平.液压控制系统及设计[M].北京:化工工业出版社,2006.
[2]程钢,王红岩,等.虚拟世界真实体验——基于MSC.EASY5的车辆静液传动系统建模与仿真[J].现代制造,2005,(9).
[3]Richard D.Abbott,Timothy W.McLain,Randal W.Beard,Application of an Optimal Control Synthesis Strategy to an Electro-Hydraulic Positioning System,Journal of Dynamic Systems,Measurement and Control,2001,(9).
[4]杨信刚,王若平.车辆液压动力转向系统动态特性仿真[J].拖拉机与农用运输车,2007,(4).
