控制力矩陀螺框架控制方法及框架转速测量方法
2008-10-23张激扬周大宁高亚楠
张激扬,周大宁,高亚楠
(北京控制工程研究所,北京 100190)
主要符号说明
RS:电机定子绕组等效电阻;
RS2:两相旋转坐标系下的d、q轴绕组等效电阻;
LS:电机定子绕组等效自感;
LM:电机任意两相定子绕组间的互感;
Ld,q:两相旋转坐标系下的d、q轴等效电感;
ψf:电机转子永磁体磁链幅值;
ψf2:两相旋转坐标系下转子永磁体等效磁链幅值;
θe:转子电角度;
ωe:转子电角速度;

pn:电机极对数;
J:电机负载转动惯量;
iA,iB,iC:三相定子电流;
vAN,vBN,vCN:三相定子绕组相电压;


s:微分算子;
^:观测器计算得出的观测值;
kp2:调节器REG2的比例系数;
ki2:调节器REG2的积分系数;
kp3:调节器REG3的比例系数;
Tf:摩擦力矩;

REG2,REG3:调节器2、3的传递函数。
1 引 言
上世纪60年代末,作为一种具有力矩放大特性的惯性执行机构——控制力矩陀螺(CMG)用于大型航天器姿态控制以及航天器快速机动控制的优势就已被充分认识。自上个世纪70年代中期美国天空实验室(Skylab)和俄罗斯“宇宙”系列卫星成功应用CMG以来,共有近300个航天器在轨应用了1000余个CMG。
近年来,随着扩大有效载荷观测范围、延长定点观测时间、实现对目标的立体成像以及多目标快速跟踪等需求的日益增加,既能实现快速机动、又能满足高精度成像的卫星平台对CMG提出了更高要求:不仅要求CMG输出大力矩,同时还要实现较宽的控制带宽和较高的力矩精度与力矩分辨率[1]。
目前,公开发表的文献集中在CMG系统构型、框架角奇异点回避和动力学模型等方面,而针对高精度输出力矩的实现及测量方法未见深入讨论。
文献[2]讨论了一种CMG框架驱动系统中摩擦力矩的补偿方案,对提高存在干扰力矩条件下控制系统的稳定性有一定作用。
本文通过建立直观的物理模型,研究影响CMG输出力矩精度的因素,并针对框架转速控制精度这一影响输出力矩精度的主要因素,提出一种基于正弦永磁同步电机,采用摩擦力矩观测器和补偿算法的高精度框架伺服控制方法,同时提出一种工程可行的框架转速精度测量方法。
2 影响CMG输出力矩精度的因素

图1 控制力矩陀螺物理模型
单框架控制力矩陀螺(SGCMG)可近似等效为图1所示物理模型。图1包含了SGCMG高速转子及其支撑轴、框架及其支撑轴、框架驱动电机、传动机构和框架角度传感器等组件。参考上述模型,SGCMG输出力矩精度主要和下列因素有关:
a.在转子高速旋转不平衡量作用下,由转子滚珠轴承的弹性导致的转子径向线位移和横向角位移;
b.框架支撑轴滚珠轴承弹性产生的框架轴沿径向的线位移和角位移;
c.传动机构的运动误差和弹性导致的框架轴的转角误差;
d.框架驱动力矩和摩擦力矩的波动导致的框架角速度的波动;
e.角度传感器输出信号误差导致的系统控制误差;
f.应用于快速机动平台时还包含平台机动过程中耦合力矩的影响。
在CMG产品加工和装配过程严格受控的情况下,上述各因素中,d项因素是影响输出力矩精度的主要因素。在框架转速指令值较小的情况下,若要有效提高框架转速控制的稳定性和转速动态响应性能,在正弦永磁同步电机框架伺服控制回路中引入摩擦力矩及转速观测器是一个有效途径。
3 CMG框架低速控制方法
3.1 正弦永磁同步电机矢量控制算法
与方波无刷直流电机相比,正弦永磁同步电机输出力矩平稳,更适合于实现CMG高精度低速控制,其等效数学模型为
(1)
本控制方案中,对正弦永磁同步电机采用基于转子磁场方向的矢量控制方法。该方法基于任意时刻定子绕组磁动势相等且电源向电机提供的瞬时功率相等两条原则,通过固定坐标系中的三相/两相坐标变换和固定两相/旋转两相坐标变换,可将电机输入电流空间矢量分解为两个正交分量,即励磁电流分量和力矩电流分量,且励磁电流分量与电机转子磁场方向重合。通过对这两个电流分量进行互相独立的闭环控制,实现电机高动态性能和高稳定性的控制目标。应用中,励磁电流分量指令值为零,以避免对转子永磁体的消磁作用。
若在固定三相坐标系、固定两相坐标系与旋转两相坐标系中,对应电机模型中各绕组匝数都相等,则式(1)在旋转两相坐标系中可表示为
(2)
式中,RS2=1.5RS,ψf2=1.5ψd,Ld=Lq=1.5(LS-LM)。
框架低速驱动控制系统结构框图如图2所示。图中,SVPWM为空间矢量脉冲宽度调制方法,PMSM为永磁同步电机。

图2 框架驱动用正弦永磁同步电机控制系统结构框图
图2方案中,电机转速越低,一个采样周期内由旋转变压器得到的角速度值与实际值偏差越大。此外,转速较低时,摩擦力矩将对闭环控制系统的稳定性和动静态性能有较大影响。因此,为提高闭环系统低速运行性能,在转速较低时构造转速与摩擦力矩观测器,将观测值引入闭环控制系统。
3.2 转速与摩擦力矩观测器
根据式(2)第二行表达式,由于采用的是id=0矢量控制方案,忽略Ldωeid项的影响,得到:
(3)
将式(3)转化为s域形式,整理后得到:
(4)
根据电机机械方程:
(5)
由式(5)的s域形式,结合式(4),得到:
(6)
式中,Tf为摩擦力矩。
由图2所示的控制系统结构框图,有:
(7)

由式(4)、(6)和(7),可得到:
(8)
(9)
本方案中,调节器2采用比例-积分调节器,调节器3用比例调节器。设调节器3中比例系数为kp3,式(9)变为:
(10)
由式(10)知:由观测器得到摩擦力矩观测值后,如果Tf对转速控制效果的影响被完全抵消,则由式(8)可得到转速闭环传递函数:
(11)
基于式(11),可研究调节器2和调节器3的结构和参数对转速动静态性能的影响。
由式(2)第二行表达式和式(5)所示的机械方程,有
(12)

图3 转速观测器

根据式(12),设计的转速观测器如图3所示。
图3中,系数k用于调整转速观测值的收敛速度。为保证观测器的收敛性,k应为负数。
构造摩擦力矩观测器时,为避免式(9)中Tf的微分项对闭环系统稳定性的影响,仅依据式(9)中Tf的比例项计算补偿电流值:
(13)
由式(3)、(7)和(13)得Tf观测模型
(14)
式中,有关系数如下:
由图3所示的转速观测器和式(14)给出的摩擦力矩观测器可构成图2所示的完整观测器。
3.3 电机-框架驱动系统仿真分析
基于提出的控制方案,在Matlab软件中构建了仿真模型。该模型由主程序、摩擦力矩数学模型、基于两相坐标系下状态方程和机械方程的电机模型、四阶变步长龙格-库塔法计算程序等单元组成,起动过程部分仿真结果如图4和5所示。

图4 转速指令值为1(°)/s(采样周期50μs )
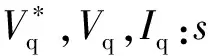
图5 转速指令值为0.01(°)/s(采样周期20μs )
仿真中,转速观测器中系数k取为-900。从图4和5中的转速控制效果来看,闭环系统工作稳定,且转速观测值能在40ms内收敛到接近实际值。此外,从图4和5中还可看出,摩擦力矩观测值与实际值相似,且仅滞后一个采样周期。
图4和5中,系统进入稳态后,转速观测值略高于实际值。该现象解释如下:对图3给出的转速观测器进行理论分析可知,转速观测值收敛精度随摩擦力矩的减小和系数k绝对值的增加而提高,而系数k绝对值过高将降低整个闭环控制系统稳定性。因此,在根据系统稳定裕度要求确定系数k后,转速观测值收敛精度取决于摩擦力矩幅值的大小。由于实际物理系统中不可避免存在摩擦力矩,在转速观测值与实际值之间必然存在稳态误差。通过采用合适的润滑措施以减小摩擦力矩,可有效提高图3所示的观测器的转速观测精度。
在转速指令值较低的情况下,根据摩擦力矩观测值的大小,将转速指令值乘以一个略大于1的系数后送入闭环控制系统,也可有效提高实际转速稳态控制精度。
4 CMG框架低速精度测量方法
上节讨论了一种基于转子磁场方向的正弦永磁同步电机矢量控制方案,采用该控制方案可有效提高转速动态响应性能和低速控制精度,并避免长期运行中定子电流对转子永磁体的消磁作用。本节讨论一种框架低速精度测量方法。
工程应用中,需要衡量实际CMG框架伺服控制的精度。参考国外CMG工程应用中的测量方法,一般以速度精度作为衡量框架伺服控制精度的唯一指标,速度精度定义为框架平均角速度与角速度指令之差和角速度指令的比值,通常采用定角测时的方式进行测量。
针对有较高输出力矩精度要求的应用场合,单纯采用速度精度作为衡量指标不足以完整体现框架伺服控制精度,还需考虑如下两个衡量指标:
速度分辨率——框架平均角速度的最小增量;
速度平稳度——框架实际角速度对于其平均角速度的波动程度。
上述指标可以通过如下方法进行测量:
在一定转速范围内,首先给定框架角速度指令ω(使框架以角速度ω旋转);然后采用不同采样时间,用定时测角法测得框架角度变化量θi(一般不少于10组);根据试验测试数据计算CMG框架在ω角速度下的速度平稳度和速度精度:
(15)

(16)

如果测量速度分辨率,则在ω上增加一个最小速度增量,使框架工作在ω′速度下,并记录多次测量的角度数据。
速度分辨率的计算公式为:
Rω=|ω′-ω|
(17)


上述衡量指标采用了平均值概念,对于CMG,可通过在框架标称转速下的理想位置两侧各加上一个小角度的正负误差带,来衡量瞬时转速控制效果。若测量得到的实际转速始终位于正负误差带内,则被测的CMG满足速度控制要求。
按照上述衡量方法,某型号控制力矩陀螺产品的框架速度伺服控制精度如图6所示。图6中显示,框架角速度实测值始终位于其正负误差带之内。此外,图中还给出了根据框架角度实测值,由式(15)和(16)计算得到的角速度平稳度和精度。由该实测结果,确定该型号CMG满足框架速度精度要求。

图6 控制力矩陀螺的框架速度伺服控制精度
5 结 论
本文在对影响控制力矩陀螺输出力矩精度的相关因素进行分析的基础上,提出了一种采用摩擦力矩观测及补偿策略的正弦永磁同步电机矢量控制方法,用于框架驱动控制。目前,已基于实际产品模型进行了系统仿真,仿真结果验证了该方法用于框架伺服控制,可提高低速驱动性能。
同时,文中还给出了衡量框架伺服控制性能的主要指标及其测量方法,该方法具有较强的工程应用意义。
