基于联合仿真的电励磁同步电机线性自抗扰控制
2024-02-21李国强
李 可,李国强
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引言
随着全球环境问题日益严重,新能源方向的研究成为当前热点。电动汽车是全球快速发展的新能源领域之一,电机作为电动汽车推进系统的重要部件,在电机和控制理论方向正在进行大量研究[1]。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)转子采用稀土材料励磁,可实现高转矩密度且控制简单,但稀土磁铁价格昂贵,在提取和精炼过程中并不环保,稀土材料的回收过程复杂且不成熟[4-5]。
电励磁同步电机主磁场由转子绕组通直流电产生,由于转子电流可调,因此可实现电机高起动转矩和宽调速范围运行,在电动汽车应用上存在一定优势,也避免了使用稀土材料励磁,既环保可持续,电机价格也相对偏低[6-7]。同时,电励磁同步电机id=0 矢量控制方法,在考虑同步转矩、忽略磁阻转矩的情况下,可实现电磁转矩和电流的解耦控制。
凸极电励磁同步电机(Electrically Excited Synchronous Motor,EESM)的磁阻转矩部分,对电机控制系统影响较大[8]。最大转矩电流比(Maximum Torque Per Ampere,MTPA)矢量控制在输出最大转矩的情况下,能使电机定子电流输出最大,在控制过程中综合考虑电机同步转矩和磁阻转矩可获得较好的控制性能[9-10]。张源等[11]对速度外环使用分段式方法,电流内环使用预测控制实现电机MTPA高动态响应。邱建琪等[12]将虚拟信号注入最大转矩电流比控制以实现自寻优电机工作点,相较于传统公式法对参数变化带来的影响更小。付兴贺等[13]在分析参数不确定情况下MTPA 的多种控制方法,总结了参数不确定的内嵌式永磁同步电机MTPA 控制策略的发展趋势和存在问题。吴伟亮等[14]研究了电励磁同步电机大功率情况下的无速度传感器控制,可实现更高的功率因数和适用性。李枫等[15]对电励磁直线同步电机磁悬浮系统设计了三阶非线性自抗扰控制器,结果表明该方法具有良好的动态性能和抗干扰性能。
线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC)具有天然的解耦性,较强的抗干扰性能,能有效增强系统的鲁棒性[16]。邵佳威等[17]提出一种变结构线性自抗扰控制策略对系统扰动进行二次观测,实验表明该方法可有效提升系统的稳定性和抗扰动性能。邵星灵等[18]针对高超速飞行器中的轨迹抗干扰跟踪问题,结合辅助—扩张状态观测器(MA-LESO)和集合制导逻辑,提出一种线性自抗扰再入制导率,可满足纵向、横侧向的平面制导需求。武锡铜等[19]在Stewart 平台中设计了基于运动学模型的运动控制系统,以实现高精度控制。通过轨迹规划工作空间,基于MA-LESO 的线性自抗扰控制来提升系统鲁棒性,抑制外部扰动。Lin 等[20]提出一种基于MALESO 的永磁同步直线电机改进滑模控制策略,通过观测器观测总扰动,将反馈信息补偿到滑膜速度控制器的输出信号,既能优化系统动态和静态品质、抗干扰能力和鲁棒性,还能有效削弱滑膜控制中的抖动。
本文首先设计EESM 有限元模型,然后通过Simulink-Maxwell 联合仿真以验证电机控制算法的有效性。具体为,在电励磁同步电机控制系统中采用MTPA 矢量控制,对控制系统电流环设计一阶线性自抗扰控制器。此外,应用MA-LESO 观察系统变量,以提升系统扰动的估计精度和整体控制性能。
1 电励磁同步电机结构与数学模型
1.1 有限元模型
本次研究中首先在Maxwell中设计EESM 有限元模型,如图1所示。
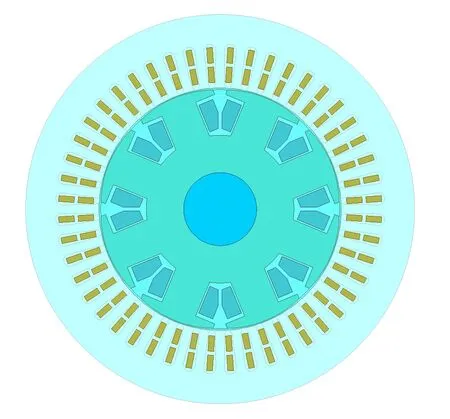
Fig.1 Finite element model of EESM图1 EESM 有限元模型
1.2 数学模型
式中:ud、uq为定子绕组dq轴电压;Rs为定子绕组电阻;id、iq为定子d、q轴电流;ωr为电机转速;ψd、ψq为定子侧d、q轴磁链;Ld、Lq为定子绕组d、q轴等效电感;Lm为转子励磁绕组和定子d轴等效绕组之间的互感;if为转子励磁绕组电流。
电励磁同步电机转子侧励磁绕组的电压方程如下:
式中:uf为转子励磁绕组电压;Rf为转子励磁绕组电阻;Lf为转子励磁绕组电感。
当d、q轴电感恒定,忽略d、q轴互感时,电励磁同步电机的电磁转矩方程可表示为:
式中:Te表示电磁转矩;p表示电机极对数。
2 电励磁同步电机MTPA矢量控制
2.1 电流极限圆与电压极限椭圆方程
电励磁同步电机定子电流主要受逆变器开关器件最大电流的约束和电机绕组铜导体横截面的限制。其中最大电流为极限电流,约束方程为:
式中:is.lim表示定子极限电流。
电机定子电压主要受功率变换器的电压输出能力和电机绕组的绝缘水平决定,定子最大电压主要受d、q轴电压约束。定子电压极限椭圆方程为:
式中:us.lim表示电机定子极限电压。
在电机稳态运行时,忽略电阻压降和交直轴互感压降。电感参数表示的电压极限椭圆方程为:
2.2 等转矩曲线分析
在同时表示电机的电磁转矩和电流极限圆、电压极限椭圆时,可直观看到在电流和电压限制下可取得电磁转矩的大小。根据式(4)可得电机定子q轴的电流为:
由式(8)可知,电流iq、电流id、电磁转矩Te的关系可通过双曲线表示。当Ld>Lq时,电机的电磁等转矩双曲线、电流极限圆和电压极限椭圆如图2 所示。其中,电流圆和电压椭圆的重合部分是电机运行区域,电流矢量在重合部分进行确定。
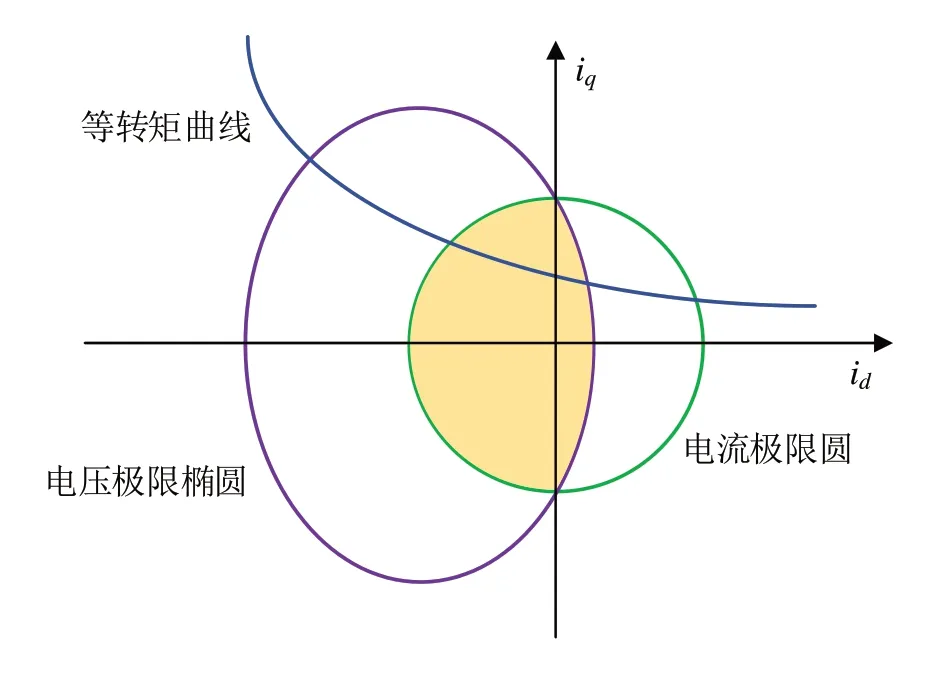
Fig.2 EESM current limit circle,voltage limit ellipse,and equal torque curve图2 EESM 电流极限圆、电压极限椭圆和等转矩曲线
2.3 电励磁同步电机MTPA控制原理
MTPA 控制分两种情况:在满足转矩输出情况下,保证电枢电流为最小值;在电枢电流恒定时,保证电磁转矩输出最大。本文分析拉格朗日乘数法进行电机矢量控制发现,MTPA 在恒转矩区能更高效地调节电流分配,减小电机铜耗和驱动控制器损耗,从而提升系统效率。由于目标函数选择较多,为了统一本文采用电机铜耗作为目标函数,约束条件如式(4),由此构建拉格朗日乘数法方程为:
式中:λ为拉格朗日乘数。
分别对式(9)中id、iq、λ求偏导,可得偏微分方程式为:
通过求解拉格朗日函数id、iq电流可表示为:
3 基于Simulink-Maxwell 的EESM 联合仿真控制系统
3.1 一阶LADRC与MA-LESO原理
图3 为一阶LADRC 系统框,对于一阶对象模型,自抗扰控制可将系统模型简化为一阶级联微分形式,从而实现更精确的控制。一阶模型的自抗扰控制系统方程为:

Fig.3 The block diagram of LADRC图3 LADRC的结构框图
式中:y表示输出y的微分;a0表示系数;w表示总扰动;b表示系统输入系数;b0表示对系统输入系数的估计;u表示控制对象输入。
控制器采用比例调节,参数Kp=。其中,ωc表示控制器带宽,通过调节控制器带宽控制系统。本文基于电机控制系统的已知参数,设计模型辅助—线性扩张状态观测器。式(12)中实际的未知扰动为f*=w+(b-b0)·u,若系数a0已知,则总扰动可设计为f=-a0·y+f*,选取状态变量x=[y f]T,则一阶状态空间表达式为:
由一阶状态空间方程(13)可得模型辅助二阶扩张状态观测器的方程为:
式中:z=[z1z2]表示观测器状态矢量;L为观测器增益矩阵。
经过参数化,将观测器特征方程的根放在同一位置可得观测器增益矩阵为。令MALESO 的系统矩阵为Ao=[A-L·C],输入矩阵为Bo=[B L],可得MA-LESO 中各矩阵为:
3.2 EESM 电流环线性自抗扰控制器和控制系统设计
LADRC 具有天然的解耦性,较强的抗干扰性能,通过估计和消除总扰动能实现系统纯积分串联形式控制,提升系统的鲁棒性。本文对电励磁同步电机电流环设计线性自抗扰控制器,同时应用MA-LESO 观测并消除扰动。EESM 的d轴电压方程为:
式中:电流id系数为-Rs/Ld;控制对象输入系数为b0=1/Ld。
根据MA-LESO 原理,将已知电阻、电感参数加入观测器中能有效降低观测器带宽,或在相同观测器带宽的情况下提升d轴电流环扰动的观测精度。因此,观测和消除电流环扰动,以减少其产生的影响,能提升EESM 控制系统的性能。为此,在EESM 控制系统中q轴电流环设计一阶线性自抗扰控制器,将式(2)改写为:
由式(17)可知,A根SY据SY电 打机开已模型知后电P阻rtS、c电 截感图参:数,将iq电流系数-Rs/Lq、控制模型输入变量系数-1/Lq加入观测器中设计MA-LESO,能提升q轴电流环中扰动的观测精度,从而提升EESM 控制系统整体性能。
本文研究中电励磁同步电机控制系统在Simulink 中搭建,采用MTPA 控制实现基速以下电流分配。根据上述d、q轴电流环控制器的设计,搭建电流环一阶自抗扰控制系统,如图4所示。

Fig.4 Block diagram of the EESM control system图4 EESM 控制系统框图
3.3 基于Simulink-Maxwell 的EESM 联合仿真控制系统设计
本文应用联合仿真验证EESM 的控制算法。其中,采用八分之一电机有限元模型能在加快电机控制系统仿真时间的基础上,兼顾电机电磁性能。Maxwell 中电机的定子三相绕组采用外部电压激励,转子励磁绕组采用外部电流源激励,从而链接电机有限元模型和功率变换器。Simplorer中EESM 的联合仿真模型如图5所示。
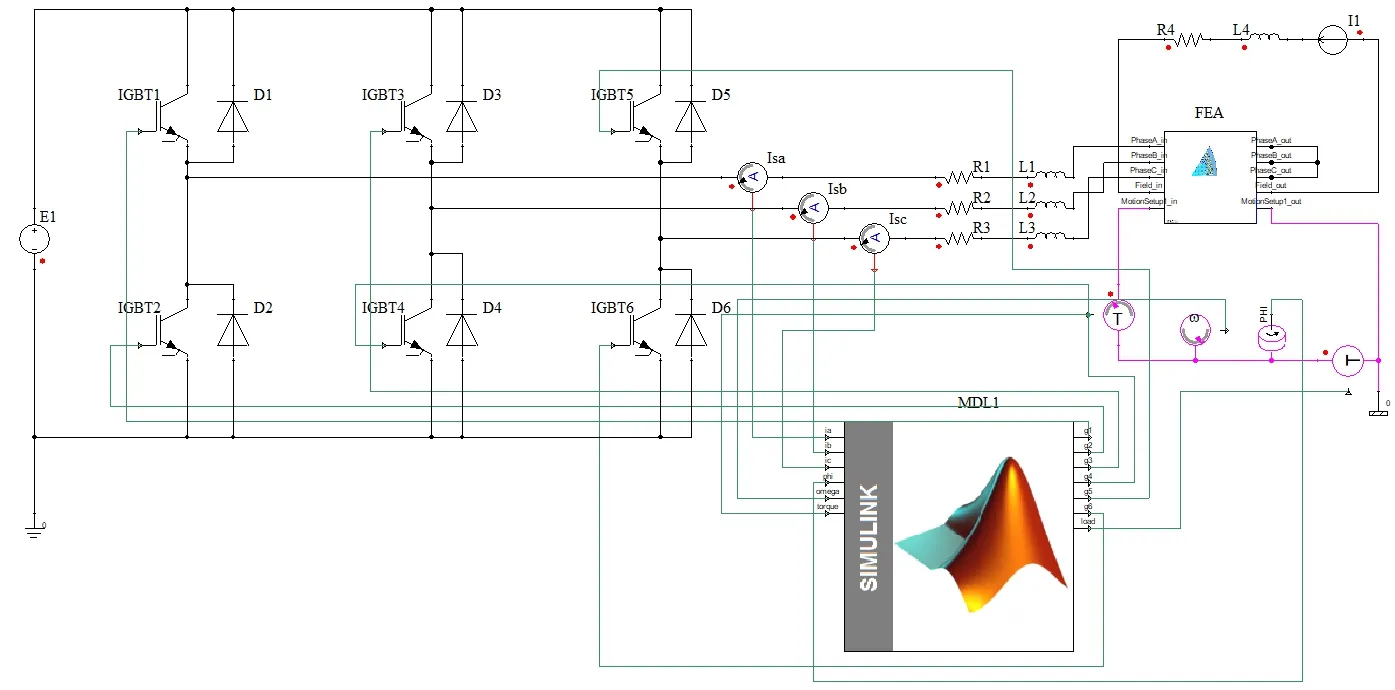
Fig.5 EESM co-simulation model based on Simulink-Simplorer-Maxwell图5 基于Simulink-Simplorer-Maxwell 的EESM 联合仿真模型
由图5 可见,首先在Maxwell 中设计EESM 的有限元模型,然后在Simplorer 中搭建电机控制系统的功率变换器部分,最后通过Simplorer 将Simulink 中搭建的电机控制算法模型与电机有限元模型进行连接,实现电机控制系统的联合仿真验证。
4 仿真验证
本文设计的仿真实验中,EESM 的具体参数如表1所示。
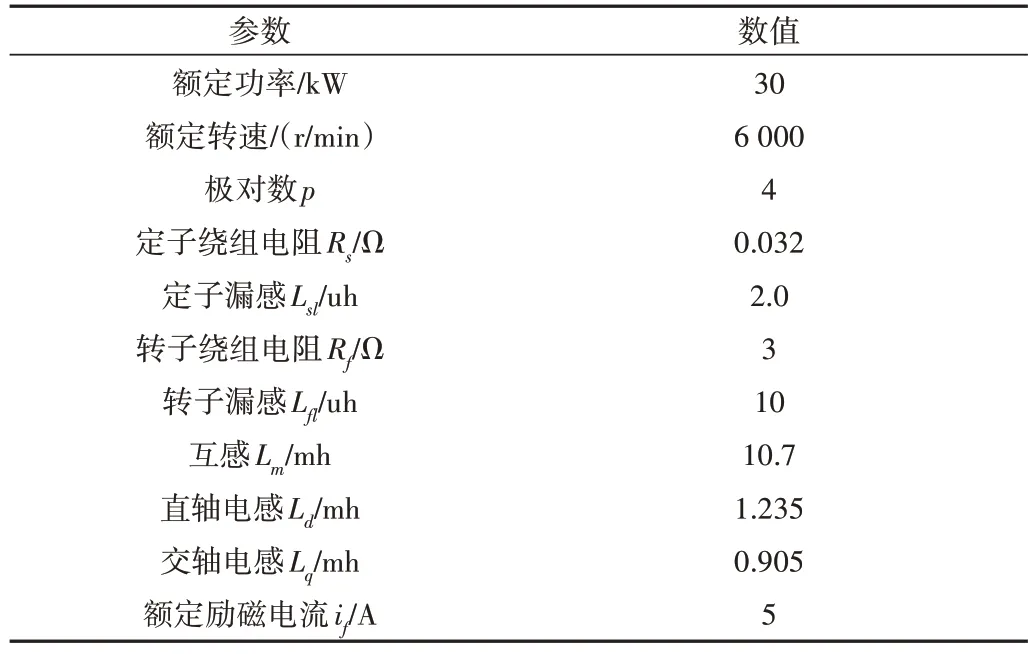
Table 1 Parameter values of electrically excited synchronous motor表1 电励磁同步电机参数值
4.1 电励磁同步电机id=0与MTPA矢量控制仿真分析
在电机控制系统中,速度环采用PI 控制,电流环采用MA-LESO 的一阶线性自抗扰控制,给定转速为1 000 r/m,负载转矩为20 N·m,对两种矢量控制方式在EESM 控制系统中进行比较,结果如图6所示。

Fig.6 Speed diagram under id=0 and MTPA vector control mode图6 id=0与MTPA矢量控制转速图
由图6 可见,起始转速上升阶段两种控制方式的上升时间和超调量相差不大;负载转矩增加后,MTPA 控制的转速下降至923.5 rpm/min;id=0 控制下转速下降至789 rpm/min。总之,采用MTPA 矢量控制下电机加负载时转速变化较小。根据凸极EESM 特性可知,定子绕组等效电感大小不同,磁阻转矩变化对电磁转矩影响较大。MTPA 矢量控制能同时考虑同步转矩和磁阻转矩,在电机加载过程具有更好的转矩和转速性能。
图7(a)、图7(b)分别为id=0、MTPA 矢量控制方式下的电机转矩仿真。在电机启动时,id=0 控制下的电机转矩最高为52.3 N·m,小于MTPA 控制下的转矩峰值86 N·m。在100 ms 增加负载转矩时,MTPA 控制的电机转矩在2 ms内到达稳态,而id=0 控制时需要7 ms 到达转矩稳态,因此MTPA 控制加载时转矩的响应性能更优。

Fig.7 Torque of EESM under two vector control modes图7 两种矢量控制方式下EESM 的转矩
4.2 EESM 不同电流环控制器仿真分析
本文电机采用MTPA 矢量控制,速度环应用PI 控制,电流环设计一阶LADRC 控制器,应用MA-LESO 观测电流环扰动能提升扰动变量的观测精度,从而有效提升系统效率。在EESM 控制系统中给定转速为3 000 rpm/min,在100 ms 时增加20 N·m 的负载转矩,不同电流环控制算法下的仿真结果如图8所示。
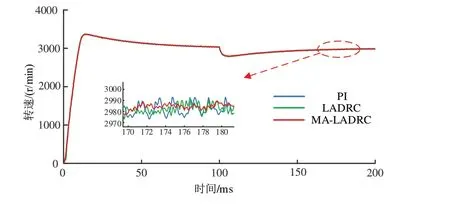
Fig.8 Speed of EESM motor under different control modes图8 EESM 在不同控制方式下转速
由图8 可见,在电机进入稳态时采用MA-LESO 的LADRC 系统转速的波动范围更平缓,电流环PI 控制的转速波动相较于电流环LADRC 控制的转速波动更明显。此外,增加负载时带有MA-LESO 的LADRC 系统的电机转速波动量相对较小。
图9 为3 种电流环控制器下的EESM 转矩波形。由此可见,在100 ms 时加20 N·m 负载,电流环PI控制下的转矩进入稳态后,转矩波动范围最大约为18 N·m;电流环采用LADRC 或MA-LESO 控制时电机转矩在增加负载后稳态转矩的波动范围约为14 N·m,转矩更稳定。

Fig.9 Torque of EESM for different current loop controllers图9 不同电流环控制器的EEESM 转矩
在负载增加时,采用MA-LESO 控制的转矩响应时间更快,主要在于MA-LESO 中包含电机已知参数信息,在电机运行中能观测并消除与电机参数相关的部分扰动,从而减小观测器对扰动的观测范围,提升系统整体性能。
图10为3种电流环控制器下的EESM 定子直轴电流波形。由此可见,在电机空载和带载情况下,采用MA-LESO的LADRC 系统定子直轴电流波动量相较于PI 控制器、LADRC 控制器更平缓。其中,电流环PI 控制下的定子直轴电流波动较大,在电机运行中性能偏差,主要在于定子电流环LADRC 控制器设计中应用MA-LESO 能在相同带宽下更精确地观测扰动变量,同时充分利用了控制对象的已知信息设计控制器,能提升控制系统的整体性能。

Fig.10 Direct axis current of EESM for different current loop controllers图10 不同电流环控制器的EESM 直轴电流
5 结语
本文基于Simulink-Maxwell 对EESM 控制系统进行控制算法的联合仿真验证。首先,在电机控制系统中选取并设计MTPA 矢量控制方式,设计电流环LADRC 控制器,基于电机已知参数设计MA-LESO 以观测和消除系统扰动。然后,设计电流环PI 控制器和电流环常规LADRC 控制器来验证EESM 控制系统的可行性。
实验表明,相较于传统id=0矢量控制方法,采用MTPA矢量控制方式的EESM 在带载时转速波动较小,负载变化时的影响更小。在采用MTPA 控制的情况下,将不同算法应用于电流环可知,在电流环LADRC 控制器中采用MALESO 观测扰动,相较于常规LADRC 和PI 电流环控制,电机转速在稳态时波动幅度更小,电机带载时转速变化较小,抗干扰能力更强,转矩在空载、带载时的波动相对平稳,空载加速时的转矩抖动偏小。此外,在采用MA-LESO的LADRC 电流环控制器后,电机定子直轴电流在空载、负载时情况下波动相对较小,电机整体控制性能得到显著提升。
