一种自动化轨道式龙门起重机作业任务调度多目标优化方法
2023-12-29徐波
徐 波
上海振华重工(集团)股份有限公司
1 引言
自动化集装箱轨道式龙门起重机(以下简称轨道吊)作为集装箱码头核心的装卸设备,其任务调度的优化是提高码头整体运营效率的关键。自动化轨道吊作业任务调度多目标优化问题是一个复杂的系统工程问题,需要考虑多个相互冲突的目标,如装卸效率、设备利用率、能源消耗等。常规的研究方法主要包括数学建模、优化算法设计和案例分析等,其中数学建模是关键的一步,其通过抽象和简化实际问题,建立相应的数学模型,为后续的优化算法设计提供基础。优化算法设计则是利用各种计算工具和算法策略,求解数学模型的最优解或近似最优解。案例分析则是通过对一些真实的、具有代表性的案例进行详细研究,验证模型和算法的可行性和有效性。蒋敏敏等针对双轨道吊协同方案通过结合蚁群算法进行最优解搜索[1];周勇等以铁路集装箱中心站作为研究对象,提出一种双层柔性调度方案[2]。本研究结合双层遗传算法,通过构建多目标优化函数,求解并优化自动化集装箱轨道吊作业的任务调度方案。
2 自动化轨道吊作业任务调度多目标优化研究
2.1 作业任务调度决策变量提取
为对自动化轨道吊的作业任务进行多目标优化调度研究,首先对优化问题进行多元分析处理。然后在此基础上对决策变量进行提取,从而为后续的多目标优化调度函数的构建提供帮助。
首先,将自动化集装箱轨道吊任务作业的调度优化问题分解为3个子问题。
问题1:考虑能耗的自动化岸边集装箱起重机(以下简称岸桥)与自动导引车(AGV)的协调调度问题[3]。
问题2:考虑能耗的自动导引车与轨道吊(ARMG)的协调调度问题。
问题3:考虑能耗的多项设备集成协调优化问题[3]。
在考虑能耗的自动化岸桥与自动导引车的协调调度问题中,所需要考虑的决策变量涉及到3个方面,分别为操作时间、操作设备参数以及作业顺序。以上述3个分析方面作为切入点,提取决策变量包括货物装载车的停靠时间、集装箱的具体位置信息、经过装卸的货物吨数、集装箱操作的作业顺序、自动导引车的运输距离、自动导引车的运输路径、自动导引车在空载状态下以及满载状态下的行进速度等[4]。同理,在考虑能耗的自动导引车与轨道式吊运机的协调调度问题中,针对上述3个分析方面所提取的决策变量与问题1的决策变量类似。针对问题3,所提取的决策变量包括3个运输设备的作业顺序、自动化岸桥的作业开始时间、自动引导车的运输开始时间以及轨道吊的起吊时间。通过上述对决策变量的分析,构建关于轨道吊作业任务调度的决策变量集见表1[5]。
根据表1中的内容,构建出的决策变量集DV的具体表达式:
(1)
通过上述步骤即可完成对优化问题决策变量的提取。该变量将作为主要考虑因素,为后续的多目标优化决策函数的构建提供帮助。
2.2 优化函数构建
以轨道吊作业总延误时间最小作为优化目标,构建出目标函数:
(2)
(3)
式中,RS和RL分别代表海侧和陆侧的轨道吊作业集合;di,0为作业i的操作时间;t(zi,1)和t(zi,2)分别为集装箱在进行第一段和第二段作业任务时的持续时间。在自动化集装箱轨道吊作业的操作过程中,海陆侧的作业时间不能出现重叠的情况[6]。因此对于需要以接力方式完成的集装箱作业来说,每段操作作业顺序在操作时间上有着严格的限制。对此,以集装箱作业的操作顺序作为约束条件,构建出约束条件表达式:
EndBeforeStart=(zk,1,z(3-k)i,2)
(4)
式中,zk,1为由轨道吊k完成的第1段集装箱操作作业;z(3-k)i,2为由轨道吊3-k完成的第2段集装箱操作作业。除了上述对集装箱作业操作顺序的约束以外,还针对接力区的集装箱容量进行了约束。采用pulse函数对接力区集装箱容量进行约束,具体约束表达式为:
(5)
式中,QVVmax代表集装箱所能够支持的最大容量。
通过上述步骤即可完成对轨道吊作业任务调度多目标优化函数的有效构建。以轨道吊作业总延误时间最小作为优化目标,并以集装箱容量和操作作业顺序作为约束条件,构建目标函数。通过对该目标函数进行求解,即可得出多目标优化调度方案。
2.3 多目标优化函数求解及调度方案生成
针对上述构建出的轨道吊作业任务多目标优化函数,采用双层遗传算法对其进行求解,从而生成调度方案。求解流程见图1。
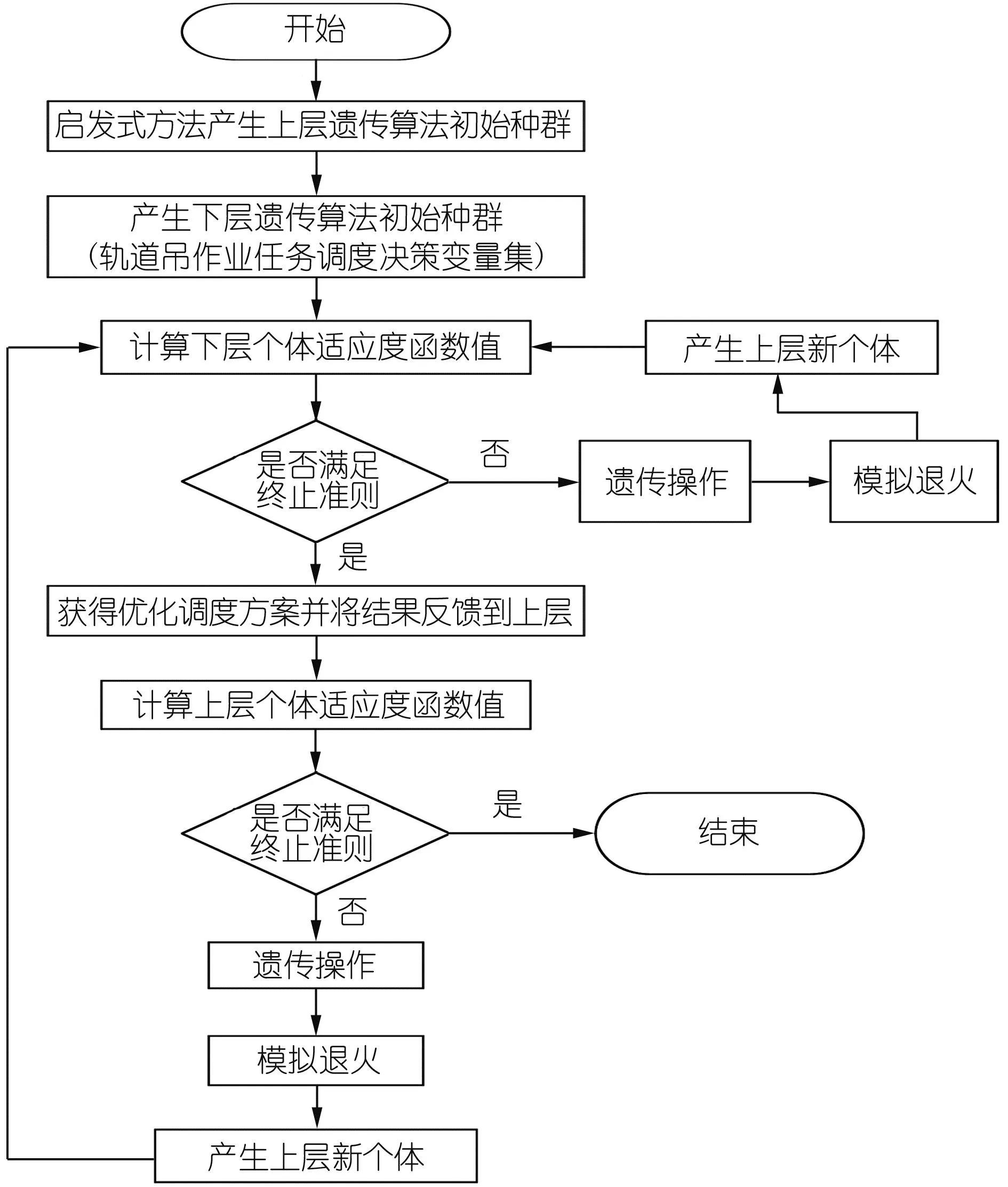
图1 基于双层遗传算法的多目标优化调度函数的求解流程
首先采用上层算法对轨道吊作业任务调度多目标优化函数进行求解,生成关于自动化岸桥、自动导引车以及轨道吊的协调调度方案。在此基础上,确认3个运输设备的起点运输位置以及终点运输位置,并将位置信息输送到下层的遗传算法中,以上述构建的目标函数为对象,对该函数进行求解,从而得到运输设备的运输路径规划结果。在采用遗传算法对目标函数进行求解时,主要通过对个体函数适应度值进行计算,并判断其是否满足终止准则来检验调度结果的合理性。上下层遗传算法的适应度函数为:
(6)
式中,f(x)为上文构建的多目标优化函数;cmax为f(x)的最大估计值。模拟退火算法的具体计算公式为:
(7)
式中,Fit(i)为初始种群在变异操作开始之前的个体适应度;Fit(j)为初始种群在变异操作之后优化得到的个体适应度;T为退火温度。通过上述操作即可完成对于多目标优化函数的有效求解,生成轨道吊作业任务的调度方案。
3 实验论证
为了证明所提出的自动化轨道吊作业任务调度多目标优化方法在实际优化效果方面优于常规的轨道吊作业任务调度优化方法,在理论部分设计完成后,构建实验环节,对本方法的实际优化效果进行检验。
3.1 实验说明
本次实验选取2组常规的轨道吊作业任务调度优化方法作为对比对象,分别为基于差分进化算法的轨道吊作业任务调度优化方法,以及基于启发式算法的轨道吊作业任务调度优化方法。通过构建实验平台,采用3种优化方法对同一组轨道吊作业调度方案进行优化分析,对比不同方法的优化效果。
3.2 实验对象
本次实验选取的实验数据来自于某自动化集装箱作业平台,通过对该平台中不同设备的数据进行调取,构建出仿真运行模型,并针对生成的任务调度方案进行模拟优化与运行分析。自动化集装箱作业区域布局见图2。

图2 自动化集装箱作业区域布局图
通过调取集装箱操作平台的后台数据,获得设备以及装置参数见表2。
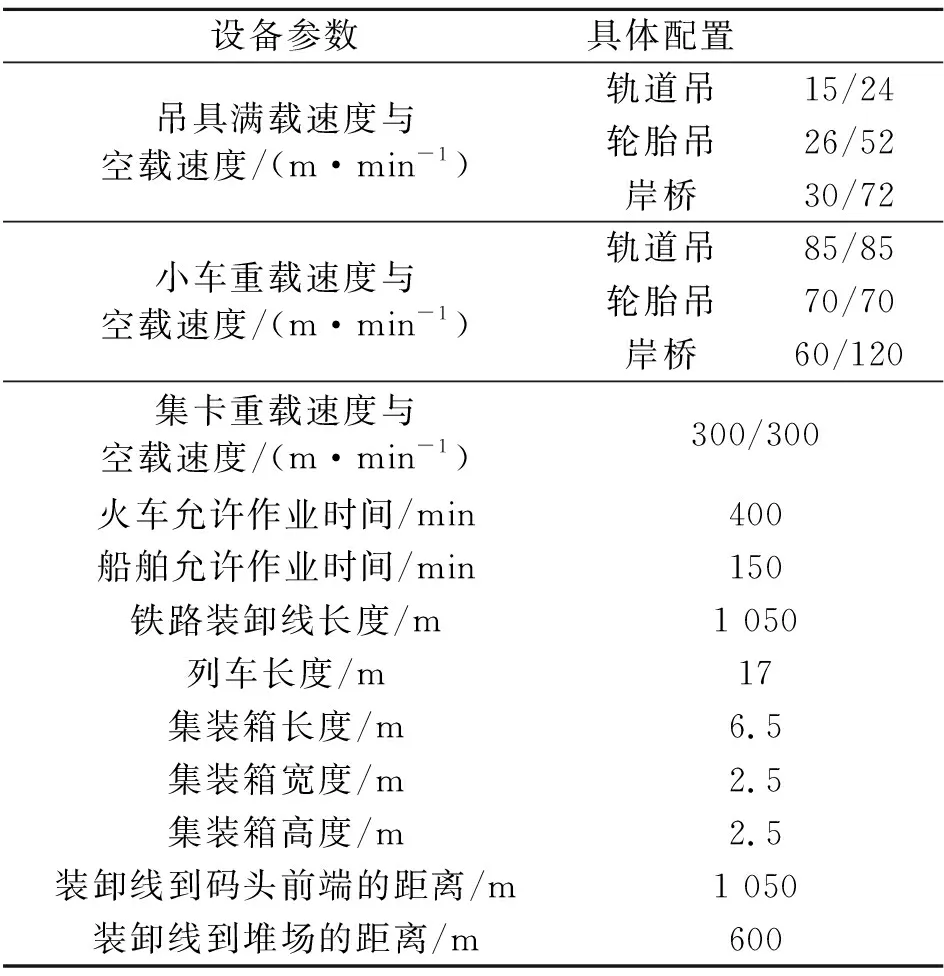
表2 设备及装置参数
对上述设备的位置进行标定,获取不同设备的具体位置信息,将该位置信息作为基础参数,从而生成基础的调度方案,然后采用3种优化方法对调度方案进行优化分析,从而比较不同方法的实际优化性能。
3.3 优化效果对比结果
本次实验选取的对比指标为不同方法的优化效果,具体实验指标为不同调度方案下的轨道吊作业轨迹重叠度,该值越低,代表方案的调度效果越好。具体实验结果见图3。
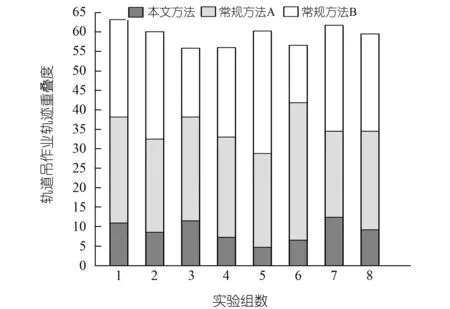
图3 轨道吊作业轨迹重叠度对比结果
通过上述实验结果可以看出,在自动化轨道吊作业任务多目标优化调度方法下,轨道吊作业轨迹重叠度均在15以内,远低于2种常规调度方案下的重叠度。由此可以证明该方法对于任务调度方案的优化效果更好。
4 结语
针对自动化轨道吊作业任务调度方案进行多目标优化研究,并提出优化方案。该方案可使自动化轨道吊的作业更加高效、安全和稳定,从而满足日益增长的海运对码头装卸效率的需求。
