港口用复合能源电动运输车能量管理策略研究
2023-12-29范榉华范振国
范榉华 赵 辉 范振国
1 天津金岸重工有限公司 2 天津理工大学
1 引言
港口运输需要大量的平板运输车辆,传统能源的港口用运输车能耗高、污染严重,已不适应港口绿色化建设需要,因此,采用全电动运输车是节能减排的必然要求。目前,由于电池技术的制约,以动力电池作为单一能源的港口运输车辆,存在动力电池功率低、不能大电流充放电、使用寿命短、续航里程不足等问题,制约了港口运输车辆的电动化改造进程。
为了解决单一能源电动车存在的不足,采用先进控制策略的复合动力港口电动运输车成为该领域的研究热点,尤其在能量管理控制策略方面。Zhang等提出在多岛遗传算法的基础上建立优化模型和控制策略,降低功耗和能量损失[1];Du等设计了一种新型的深度强化学习算法深度Q-learning,实现更快的训练速度和更低的能耗,且其能耗经济性接近全局最优[2];Sankarkumar等对由电池和超级电容器单元组成的混合能源储存系统(HESS)开展研究,测试证明储能元件中加入超级电容可有效提高能源管理效率,降低能耗水平、电池温度及充放电电流值[3];Li等在车辆混合储能系统中,设计了在线功率分配算法,使PHEV的经济性提高了8.9%,同时保证车辆具有优良的动态性能[4]。赵国柱等提出模糊逻辑控制能量管理策略,减轻蓄电池的负担[5];李博超等结合神经网络和模糊逻辑系统各自的优点,利用神经网络对模糊逻辑系统进行多目标优化,建立模糊神经网络,加快控制速度,对整车能量进行有效合理地分配控制,改善整车经济性[6];李日业通过调整整车能量回收控制策略进行车辆实测,证明所提出的能量回收控制策略可有效提升能量回收率,增加续航里程[7]。
本研究针对港口用复合能源电动运输车的能量管理控制策略,采用AVL-Cruise与MATLAB/Simulink平台进行联合仿真,搭建整车模型及整车控制策略模块,结合混沌映射、模拟退火及自适因子思想改进遗传算法,提出CSAGA优化算法,对移动储能电车的双电源功率模糊分配模型规则进行优化。
2 复合储能拓扑结构
作为电动车的动力源,复合储能组件将直接决定整车动力性和续航能力。复合电源电动车驱动系统主要包括驱动电机、动力电池组、传动系统、驱动轮等。正确匹配各部件参数,使它们之间实现最优匹配,能够显著提高电动车的动力性与经济性。
复合储能系统的结构形式包括:被动结构、电池主动控制结构、超级电容主动结构和双主动控制结构[8](见图1)。

图1 复合储能系统典型拓扑结构
被动结构具有成本低、安装后重量轻和系统性能高的特点,不足之处是超级电容器的利用率低,拓扑性能结构的效率低。超级电容主动结构使得超级电容器的能量可以得到充分利用,额定容量可以得到优化,但由于电池的功率是不可控的,故其充放电电流的优化也受到限制。电池主动控制结构,可用于优化和控制电池的充放电电流,延长电池寿命,缺点是超级电容端电压在脉冲负载电流区间内变化剧烈,影响母线侧电压,导致电机转速不稳定,影响整机运行稳定性。双主动控制结构使用寿命长,电池和超级电容可以深度放电,因此,其储能可以充分利用,但成本高、效率低、控制复杂。综合比较,超级电容主动控制连接方式更为经济、实用且易于实现,故本研究采用该结构。
3 电动运输车整车仿真模型的建立
3.1 建立整车仿真模型
3.1.1 整车模型的参数
复合电源电动运输车整车模型使用前向仿真的方法,基于AVL-CRUISE搭建,在运行仿真时,车辆在制定的控制策略下行驶并产生相应的信号,与要求工况所需数值相比较,对动力系统输出相应的制动或驱动控制信号,使车辆进行功率跟随,完成指定工况的循环仿真。汽车的质量与汽车装载状态有关,不同装载情况下,汽车的质量不同,有空载、半载和满载3种负荷状态。根据整车模块的要求,输入牵引点到前轴的距离、试验台上支撑点高度、轴距、不同负载下的重心高度、汽车的整备质量(净重)、满载质量(最大总质量)以及迎风面积和风阻系数等,整车基本参数见表1。

表1 整车基本参数
3.1.2 电源模型的参数
双电源电动运输车的电源串并联个数、额定容量等参数的设定,对整车的动力性有着较大的影响。选取的锂电池与超级电容的串、并联个数和其他相关参数见表2。

表2 动力系统各部件主要参数
3.1.3 电机模型的建立
电机的作用是将锂电池的电能转化为动能,经过一系列的动力传递,驱动电动车运行,决定着电动汽车的性能。选取的永磁同步交流电动机参数见表3。

表3 电机参数
3.1.4 变速器、主减速器模型的建立
在Cruise建模中,一般通过变速器模块和主减速器模块来建立整车传动系模型。输入挡位、传动比、输入/输出侧转动惯量、输入/输出轴齿数等参数,完成模块设置。
主减速器具有将来自变速器的转矩增大,同时降低转速并改变转矩的传递方向的作用,在主减速器模块中,输入主减速比和输入、输出侧的转动惯量完成模块设定。
3.1.5 整车模型的建立
根据参数在AVLCRUISE导入整车模块,并对整车参数进行相关设置,建立各个模型。建立的整车仿真模块主要包括锂电池、超级电容、电机、制动器、差速器、变速箱、离合器、车轮,将所有模块在CRUISE中进行连接,对整车制定的控制策略在MATLAB中实现,通过Interface接口的方式,将CRUISE与MATLAB进行连接。双电源电动汽车的整车仿真模型见图2。

1.整车模块 2.变速器模块 3.主减速器模块 4.左内后轮 5.左前轮 6.右内后轮 7.右前轮 8、10.后轮盘式制动器模块 9、11.前轮盘式制动器模块 12.电机 13.差速器模块 14.驾驶室模块 15.变速箱控制模块 16.驱动防滑控制系统模块 17.超级电容模块 18.动力电池模块 19.DC/DC变换器模块 20.数据交换接口模块 21.蓄电池模块。图2 整车仿真模型
3.2 整车控制策略
CruiseInterface数据交换接口模块通过数据总线将Cruise实时数据信号通过I/O接口输出至Matlab,在Matlab中进行控制策略的优化。通过Cruise模拟整车运行,将整车速度、制动信号、启动信号、锂电池实时电量、超级电容实时电量、整车运行需求功率、变速器输出力矩输出至MATLAB,在制定的控制策略控制下,将DC/DC变换开关、升压电流限值、降压电流限值、制动压力、启动信号作为输入返回Cruise,完成控制过程(见图3)。

图3 Matlab整车控制策略架构
Cruise输出和输入信号的转换,通过制定控制策略实现。整车运行输出的锂电池实时电量、超级电容实时电量、整车运行需求功率通过模糊控制器控制,输出比例系数K来控制电池、电容输出功率比例,和Cruise各输出信号结合进而控制整车运行。制动信号、启动信号、整车速度、变速器输出力矩、整车需求功率、比例系数K共同作为输入,决定汽车运行所在模式,将DC/DC变换开关、升压电流限值、降压电流限值、制动压力、启动信号作为输入返回Cruise,完成控制过程(见图4)。
4 复合电源模糊控制策略及仿真验证
4.1 模糊控制策略
4.1.1 模糊控制原理
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的、从行为上模仿人的模糊推理和决策过程的一种智能控制方法[9]。
模糊逻辑控制器(FLC,Fuzzy Logic Controller)所采用的模糊控制规则是由模糊理论中模糊条件语句来描述的。模糊控制器的输入通过模糊化接口(Fuzzy interface)将真实的确定量输入转换为一个模糊矢量,用于控制输出的求解,由数据库(Data Base)和规则库(Rule Base)得到模糊控制规则。数据库所存放的是所有输入、输出变量的全部模糊子集的隶属度矢量值,若论域为连续域,则为隶属度函数。
4.1.2 模糊控制器设计
对电动运输车复合能源系统运用合理的控制策略,可以使超级电容发挥削峰填谷的作用,对车辆起步(需要大功率输出)和制动能量回收有重要作用,可减少大电流对锂电池的冲击与损伤,使整车处于高效运行的工作模式。根据工况,车辆的工作模式分为驱动、制动两种状态。
当整车需求功率Preq>0,车辆处于驱动状态且需求功率峰值较大时,若超级电容能量充足,可进行大电压放电,单独为电机提供动力,满足汽车大功率需求;若超级电容组能量处于中等水平,功率输出能力有所下降,则超级电容优先提供主要冲击能量,剩余能量由锂电池提供;若超级电容剩余电量小于或等于其下限值时,则由电池组单独提供能量输出。
当整车需求功率Preq<0时,车辆处于制动状态。此时若超级电容存在能量存储空间,由于其具有瞬时充电能力,制动能量由超级电容回收。
复合电源能量管理系统的模糊控制策略主要与整车需求功率Preq、锂电池电量变化SOCbat、超级电容电量变化SOCsc相关。根据3个参数实时的输入量,经模糊规则输出超级电容功率分配因子K,结合整车需求功率Preq共同求出锂电池输出功率Pbat及超级电容输出功率Psc。系统的功率分配满足:
Preq=Pbat+Psc
(1)
超级电容功率分配因子K表达式满足公式:
(2)
4.2 基于CSAGA算法的模糊控制器优化
4.2.1 遗传算法
GA(Genetic Algorithm,遗传算法)源自于对生物种群繁衍进行的模拟,是一种随机全局搜索优化方法,它模拟了自然选择和遗传中发生的复制、交叉和变异等现象,从任一初始种群出发,通过随机选择、交叉和变异操作,使个体进化到更适合环境的个体并组成种群,通过不断繁衍进化,最后得到一群最适应环境的个体,从而求得问题的最优解[10]。
4.2.2 优化目标函数的选择
优化模糊控制的参数要选取恰当的目标函数,合适的目标函数不仅能够减少运算量,简化算法复杂度,而且对整个模型的优化效果有重要影响。所设计的复合电源系统与需求功率共同作用,通过模糊控制器进行电源的输出功率分配,降低整车行驶过程中的能耗;通过加入超级电容,减小锂电池承受的峰值功率输出和峰值电流。因此,以复合电源能耗和权重乘积之和与行驶里程之比为优化目标函数:
(3)
式中,Pbat为锂电池输出功率;Psc为超级电容输出功率;D为电动车行驶总里程;w1、w2为待优化能耗分配权重;(t0,tn)为锂电池放电时间。
4.2.3 改进Tent映射初始化种群
遗传算法采用随机方法产生初始种群,不能保证初始种群能较好地覆盖待优化问题的寻优空间,导致初始种群分布性较差。故采用结构简单、收敛速度快的Tent映射来产生混沌序列,对种群进行初始化[11]。
因混沌行为是有限的,存在混沌区间不连续、生成的混沌序列呈现非均匀数据分布等问题,Tent混沌映射存在小周期和不稳定周期点。为获得更好性能的混沌系统,避免落入小周期点和不稳定周期点,在原有的Tent映射表达式上引入随机变量:
(4)
式中,N为序列内粒子个数。
由Tent映射产生的混沌序列具有良好的分布性和随机性,根据得到的[0,1]之间的混沌序列zk,引入至种群初始化过程中,以获得分布较均匀的初始化种群,提高算法早期的搜索能力,加快收敛速度:
xk=lk+(uk-lk)zk
(5)
式中,uk、lk分别为zk的上下限。
4.2.4 融合SA思想的选择算子
在遗传算法中引入模拟退火思想,对选择算子进行改进。模拟退火算法具有跳出局部最优陷阱的能力,即使算法落入了局部最优陷阱,经过一段时间后,也能再跳出陷阱[12],最终向全局最优值的方向收敛。融入SA思想的选择算子流程如下:
(1)选择父代种群中任意个体X1、X2,计算其适应度值F(X1)、F(X2)。
(2)引入Metropolis准则对进化的个体进行甄别,以一定概率接受适应度较差个体,避免陷入局部最优和克服初值依赖性。制定的Metropolis准则为:
(6)
式中,k为冷却系数,p为迭代次数,T0为初始温度。
(3)重复SA操作直至子代种群数达到设定值。
选择算子流程见图5。

图5 融入SA思想的选择算子流程图
4.2.5 自适应交叉变异算子
GA采用定值交叉率和变异率,交叉率Pc和变异率Pm的值直接影响遗传算法收敛性。交叉率越高,产生新个体越快,但应避免破坏适应度较高的个体基因。变异率越高,则算法搜索能力越随机,可能导致无法收敛,出现寻优困难[13]。对此,使用单点交叉法,提出自适应交叉、变异概率公式:
(7)
式中,Fmax、Favg为群体中最大的适应度值和平均适应度值;F为要交叉的两个个体中较大适应度值;Pc max、Pc min为最大、最小交叉率:
(8)
式中,Pm max、Pm min为最大、最小变异率;g为目前进化代数;G为最大进化次数。
为避免交叉、变异操作破坏父代优秀个体,采用精英保留策略,选取父代适应度前15%的个体替代子代适应度值后15%的个体,避免迭代过程中丢失最优解。
4.2.6 CSAGA算法
最终,所提出的CSAGA算法流程图见图6。
4.3 复合电源模糊控制策略
4.3.1 实验设计
为验证CSAGA算法优化模糊控制规则的有效性,加入专家经验控制、GA模糊控制[14]复合电源功率分配为对照组,使用MATLAB-CRUISE联合仿真,使用IDC、FTP75工况进行仿真分析。
4.3.2 实验结果及分析
图7为FTP75工况下车辆性能曲线。CSAGA优化结果相比经验模糊控制总耗能减少0.017 kWh,锂电池剩余电量提升2.256%;相比GA优化模糊规则总耗能减少0.008 kWh,锂电池剩余电量提升0.503%,锂电池电流均值下降18.7%。

图7 FTP75工况下车辆性能曲线
图8为IDC工况下车辆性能曲线。纯电动车完成一个循环工况后,CSAGA优化结果相比经验模糊控制总耗能减少0.067 kWh,锂电池剩余电量提升2.084%;相比GA优化模糊规则总耗能减少0.026 kWh,锂电池剩余电量提升0.503%,锂电池电流均值下降15.2%。
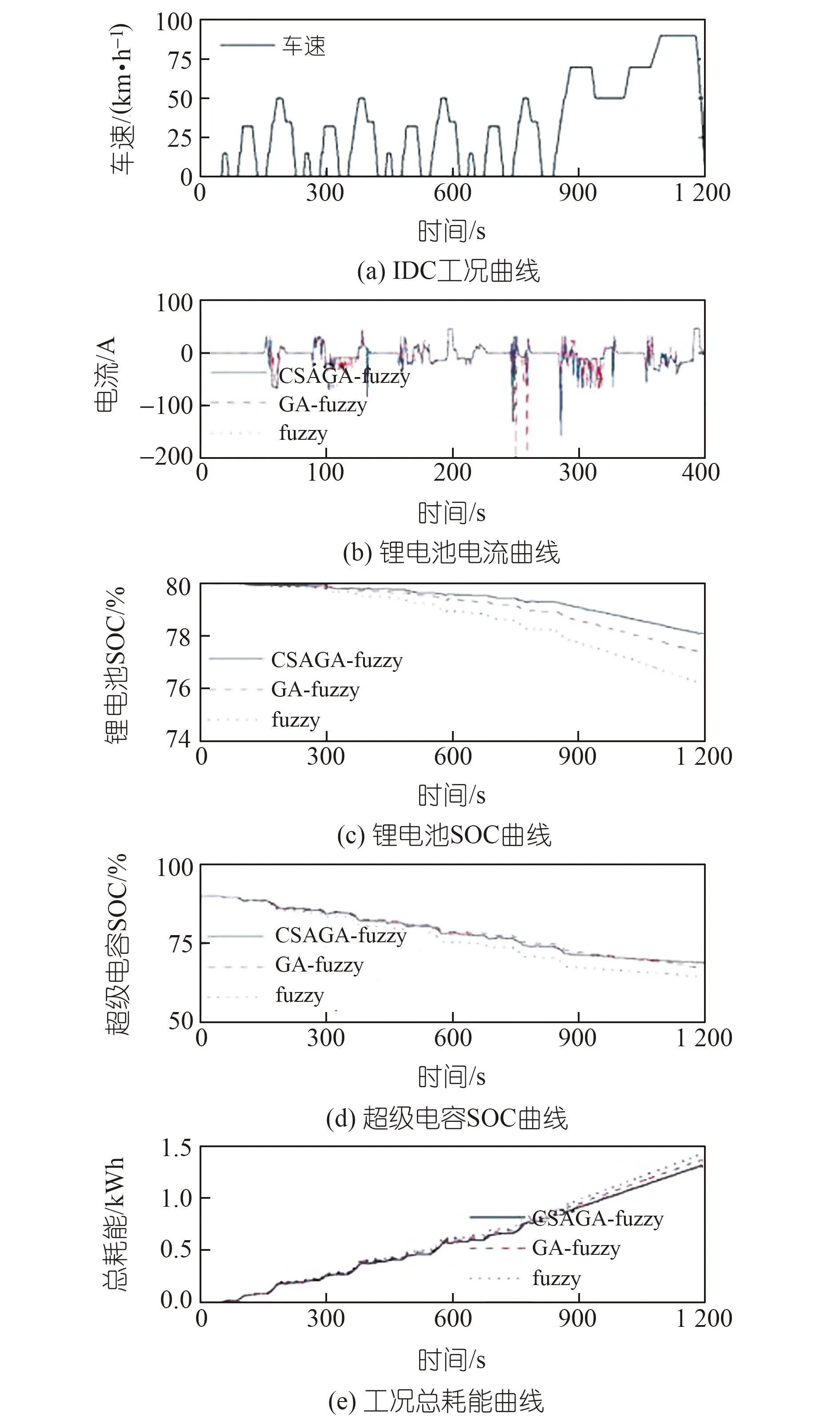
图8 IDC工况下车辆性能曲线
由此可得,随着时间的增长,CSAGA算法下的锂电池与超级电容相对于其他算法下的剩余电量会产生明显的差距。超级电容利用效果提升,锂电池剩余电量得到提高,证明改进后的遗传算法寻优能力更强,可以更好地抑制冲击电流对锂电池的影响;改进的能源控制策略能够有效提升纯电动车的续航里程,延长复合电源储能系统的使用寿命,经济性也得到提升。
5 结语
设计了由锂电池及超级电容器组成的混合能源电车供电系统,提出了一种基于模糊逻辑和改进遗传算法优化的纯电车复合能源管理控制策略。针对双电源系统的耗电量、锂电池电流波动等方面进行优化;对GA存在的缺陷,引入Tent混沌映射、模拟退火思想,制定自适应交叉变异概率,提出一种新的运行算法CSAGA,提高遗传算法收敛精度、收敛速度。通过仿真建立模型,在IDC、FTP75工况下进行仿真检验。结果表明,CSAGA优化后的模糊控制策略相比于专家经验控制、GA优化控制,各项性能指数得到提高,锂电池受到的冲击电流减少。CSAGA算法控制的能量分配策略,能有效提高纯电动运输车经济性,延长其续航能力。
