基于自抗扰对电磁耦合调速器的转差控制研究
2023-06-08谢鼎盛储江伟张泽涵刘梓敬
谢鼎盛,储江伟,李 红,张泽涵,刘梓敬
(东北林业大学 交通学院, 哈尔滨 150040)
0 引言
电磁耦合调速器是一种依靠磁拉力传递动力的装置,在工业领域应用广泛。但由于电磁耦合调速器机械特性较软[1],增加负载时,转速迅速下降,扭矩变化明显,功率损失增大。PI双闭环的控制策略,可通过人工控制的方法强化电磁耦合调速器的机械特性,提高输出转速的稳定性[2-3],但仍存在很大的优化空间。进一步对控制的优化需要先对电磁耦合机构的动力学特性与电磁转矩进行模型分析[4-6]。
线性自抗扰控制(line auto disturbance rejection control,LADRC)算法是一种具有良好控制性能的算法[7-8],能够实时估计并补偿系统收到的不确定性干扰,借助反馈环节达到优于传统PID算法的控制性能[9-11]。对于LADRC的研究,文献[12-13]运用级联扩张器的自抗扰技术,提高了永磁电机矢量控制系统的可靠性和对外界干扰的鲁棒性。文献[14]通过LADRC提高了永磁同步电机的鲁棒性,优化了控制效果。文献[15]通过自抗扰算法对步进电机进行控制,有效降低了步进电机中的扭矩脉动。文献[16]针对电动汽车的稳定性,利用自抗扰技术提高了电动汽车的驾驶平顺性。文献[17-18]在对直线感应电机的控制中,加入了自抗扰控制算法,提高了电机的输出稳定性能与抗干扰能力。
根据电磁耦合调速器的动力学特性,输入转速一定时,输出转矩与电枢和磁极之间的转差存在非线性关系[19]。目的是为了找到对于电磁耦合调速器输出转矩最大的转差速度,并通过LADRC算法进行转差控制,在负载波动时保证了输出转速的稳定性,提高了电磁扭矩。
1 电磁耦合调速器模型
1.1 物理模型
电磁耦合调速器由电枢、磁极、电流控制器等部件组成,其原理是通过磁极绕组通入励磁电流,与电枢之间建立磁拉力,磁极随着电枢同方向转动,传递动力。电磁耦合调速器结构示意图见图1。
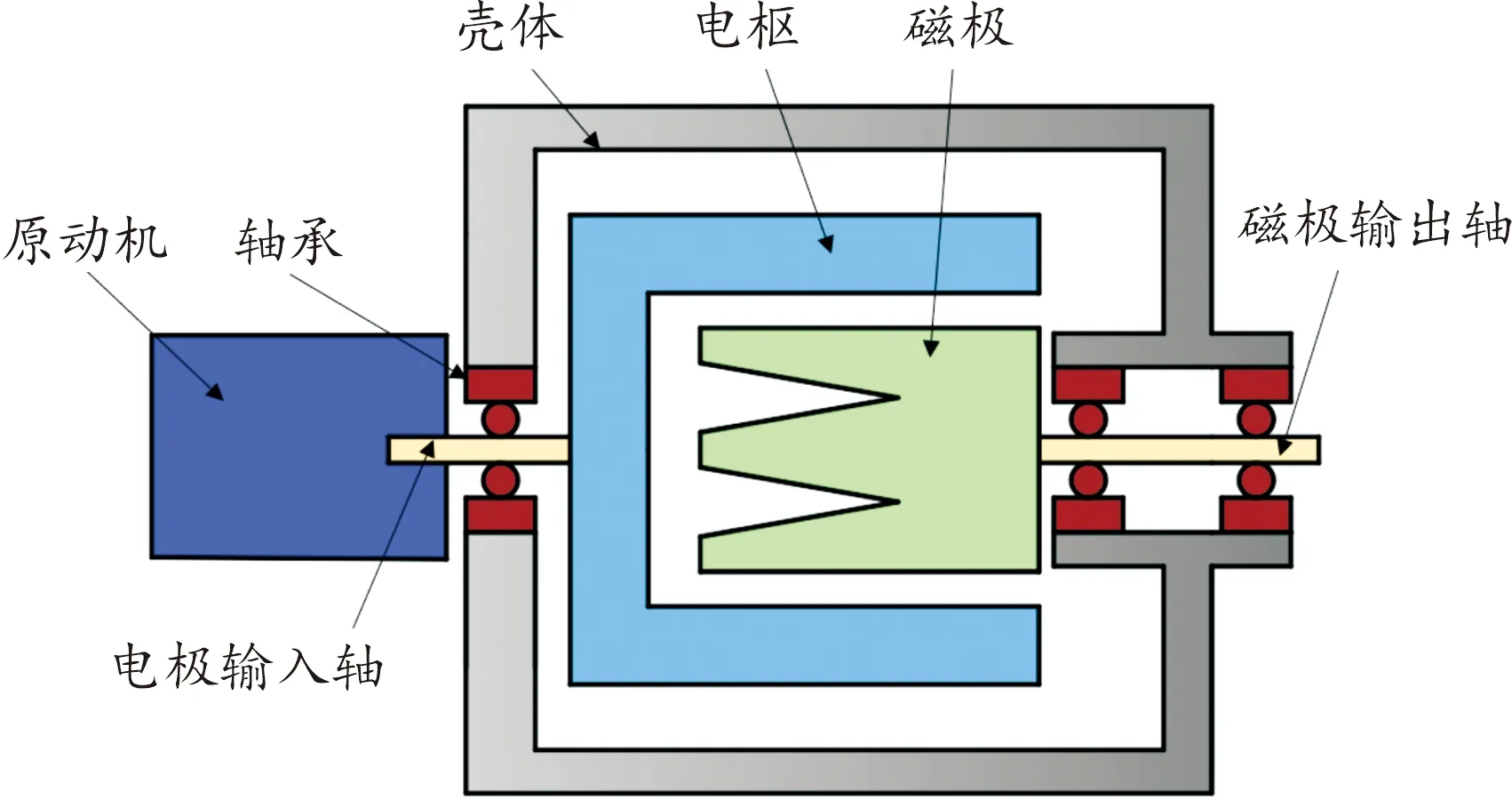
图1 电磁耦合调速器结构示意图
1.2 数学模型
电磁耦合调速器的基本模型如图2所示。图中,i为电流,u为电压,θ为A相与d轴的夹角。
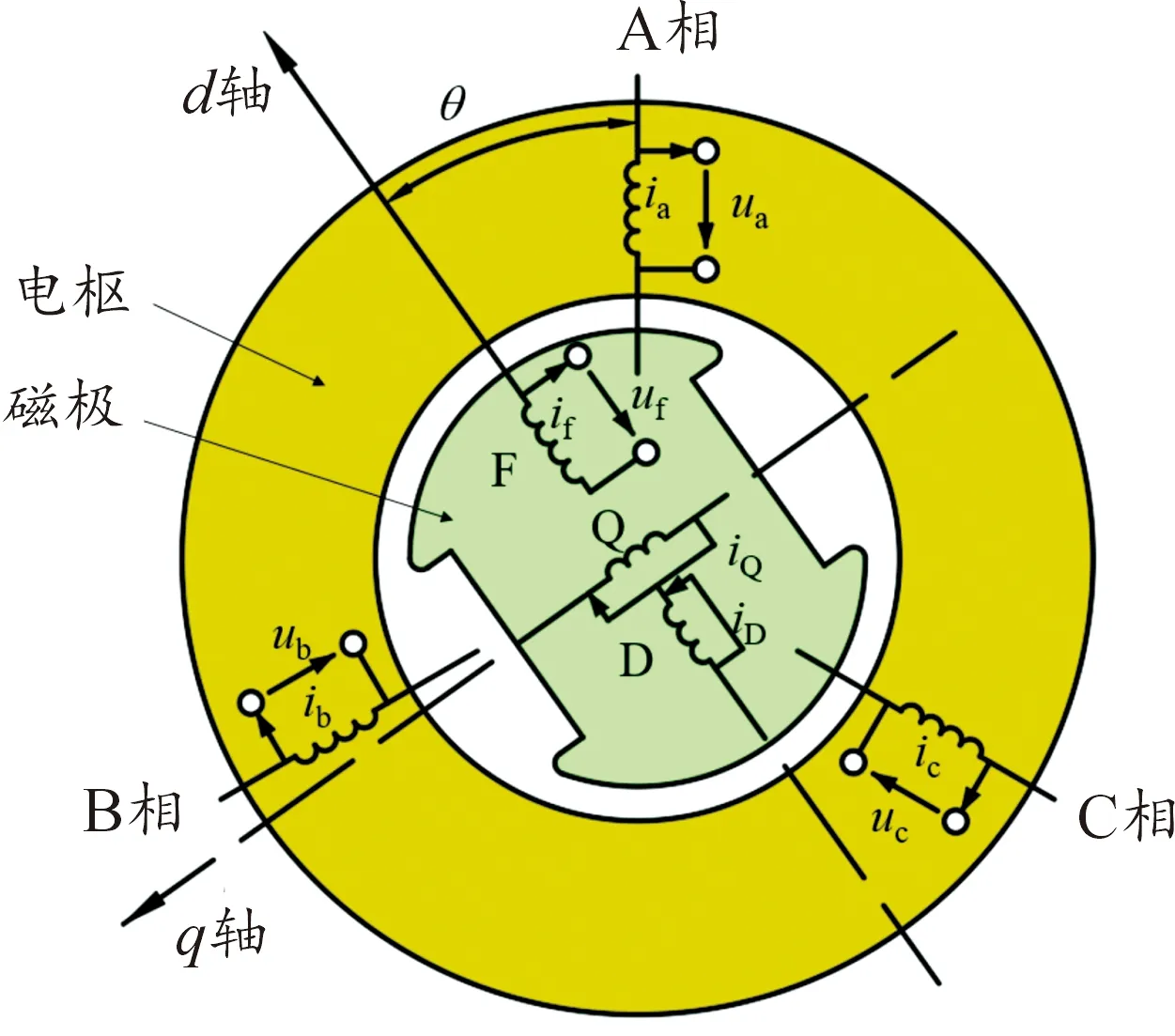
图2 电磁耦合调速器基本模型示意图
在建立电磁耦合调速器数学模型之前,需要对其做几个假设,处于理想情况下易于建立其磁链方程、电压方程、电磁转矩方程与运动方程。假设如下:
1) 没有磁路磁滞、饱和、涡流等现象。
2) 合成磁场间没有相互作用力。
3) 电枢与磁极的磁场在换相过程中没有电枢反应。
4) 没有空间谐波、励磁线圈漏磁等现象。
在推导电磁耦合调速器各方程之前,需要对电磁耦合部分进行电磁解耦[4],将电枢与磁极的各相电感、电流、电压逐个分析,通过在电机自然坐标系下建立电磁耦合调速器的三相坐标,运用电机坐标变换理论(Clark-Park变换)进行线性变换,在旋转坐标系(Odq坐标系)下表示。各坐标系关系见图3。
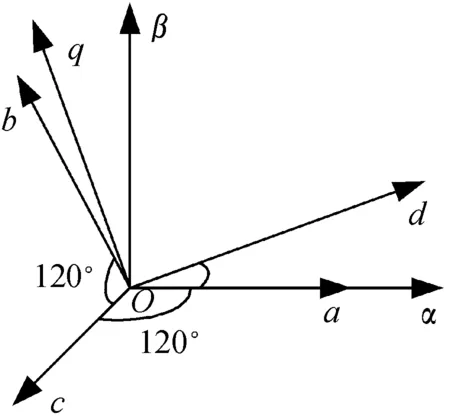
图3 各坐标系的关系示意图
在图3中,Oαβ坐标轴为静止坐标系,Oabc为电机自然坐标系,Odq为旋转坐标系。通过电磁解耦推导电磁耦合调速器的数学模型。
1.2.1磁链方程
根据电磁感应定律,电磁耦合调速器的磁链方程为:
(1)
(2)
(3)

(4)

(5)
式中:L为电感系数矩阵;ψx为在x轴上的磁链(x= {a,b,c,f,D,Q});ix为在x轴上的电流(x={a,b,c,f,D,Q})。
由于绕组在旋转坐标轴之间不存在相对运动,绕组通过电流产生的磁通恒定,阻尼绕组之间正交等因素,根据文献[4]中的整理方法可得:
(6)
式中:Ld、Lq、Lo分别为d、q、o轴上的电感;Lf为励磁绕组的自感;LD、LQ为阻尼绕组的自感;mof、moD、moQ分别为电枢三相绕组与磁极励磁绕组、阻尼绕组D、阻尼绕组Q的互感振荡幅值。
1.2.2电压方程
电磁耦合调速器绕组示意图见图4。
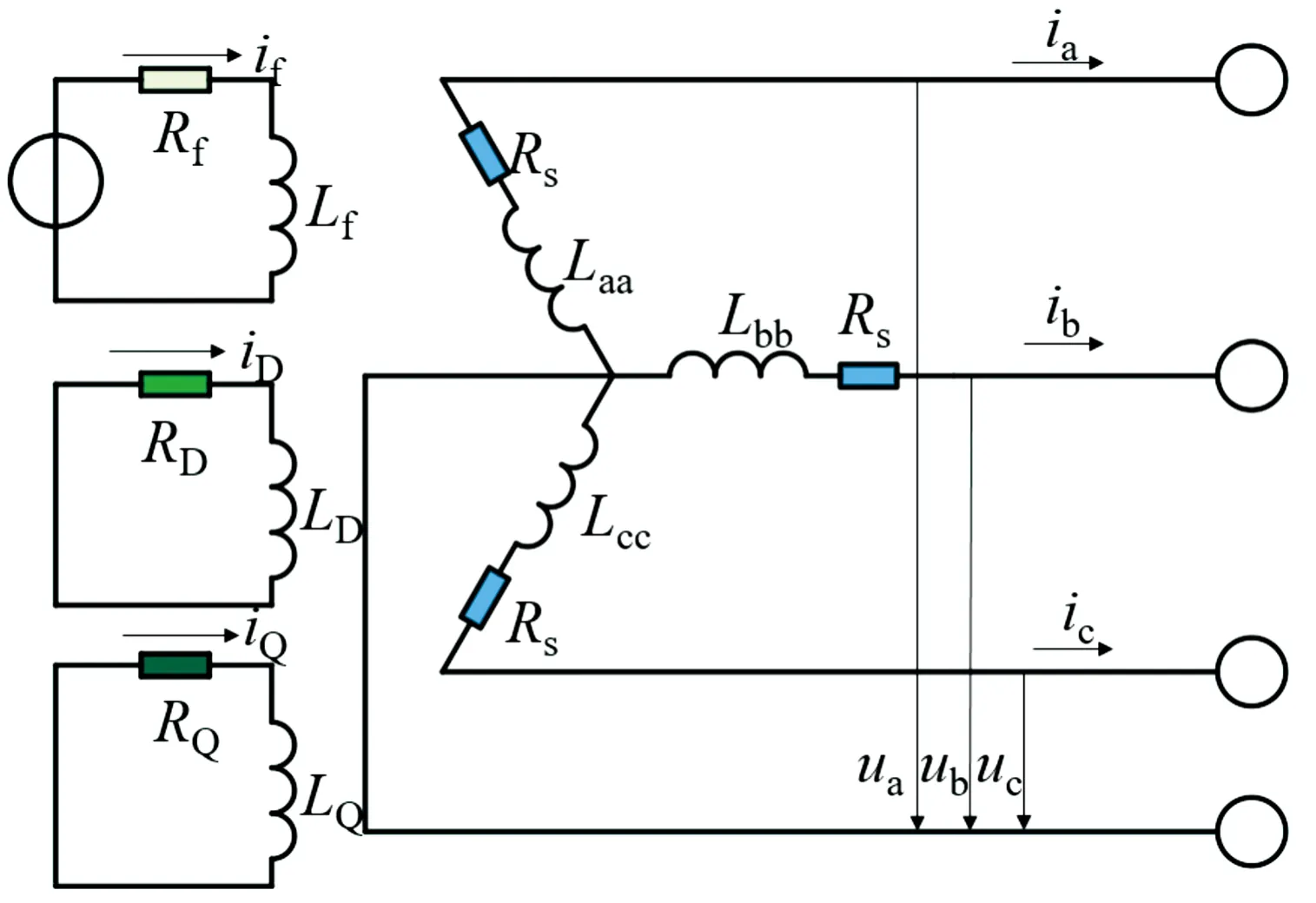
图4 电磁耦合调速器绕组示意图
根据基尔霍夫电压定律求得各绕组的电压方程:
(7)
(8)
(9)
Ro=RsE
(10)
(11)
式中:ua、ub、uc分别为电枢a、b、c绕组相电压;uf为励磁绕组的励磁电压;Rs为三相绕组的电阻;Rf为励磁绕组的电阻;RD、RQ为对应阻尼绕组的电阻;E为三阶单位矩阵。将式(6)代入电压方程整理可得:
(12)
式中:ΔΩ为电枢与磁极之间的相对转速。
根据式(6)与(12)可得d轴与q轴的等效电路,见图5和图6。

图5 d轴等效电路

图6 q轴等效电路
1.2.3电磁转矩方程
根据机电能量转换原理[20],电磁耦合调速器的转矩方程为:
(13)
整理后在Odq坐标系下表示为:
(14)
1.2.4运动方程
电磁耦合调速器输入与输出无直接的机械接触,其具有与原动机相连的电枢和与输出连接的磁极,对于其运动方程,需要单独建立。运动方程参数详情见表1。
电枢:
(15)
磁极:
(16)

表1 运动方程参数详情
2 电磁耦合调速器仿真模型
2.1 Simulink仿真模型
对电磁耦合调速器数学模型中的磁链方程、电压方程、电磁转矩方程与运动方程进行整理可得:
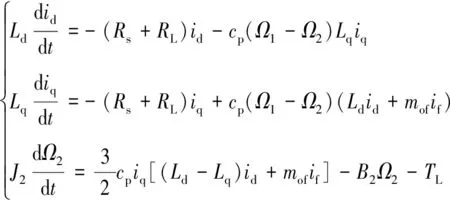
(17)
利用Matlab/Simulink进行仿真模型搭建,见图7,其各参数见表2。
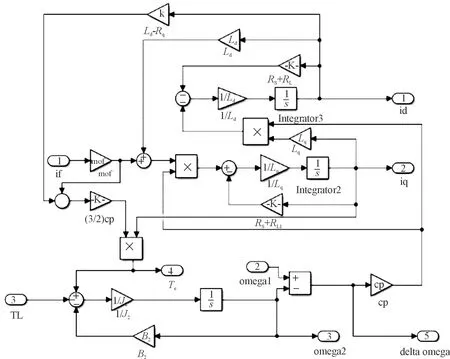
图7 电磁耦合调速器的仿真模型示意图

表2 电磁耦合调速器仿真模型参数
2.2 动力学特性分析
针对电磁耦合调速器,进行其动力学特性分析。将励磁电流if、输入转速Ω1与负载扭矩TL作为仿真模型的输入量,通过其数学模型得到d、q两轴的电流id与iq,输出转速Ω2,电枢与磁极之间的电磁转矩Te,与转差ΔΩ。
当励磁电流与负载转矩为恒定时,改变输入转速影响转差,得到其转差与电磁转矩之间的曲线关系。此为电磁耦合调速器的动力学特性曲线,见图8(if=10 A)。
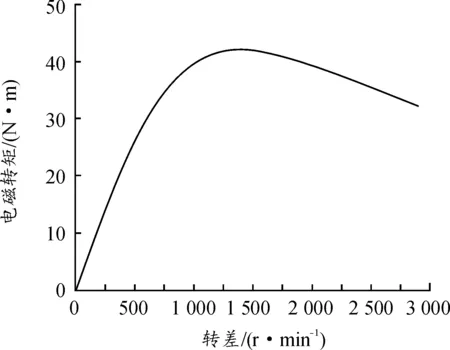
图8 动力学特性仿真曲线
根据其动力学特性仿真曲线分析可得,当励磁电流一定时,电枢与磁极之间的输出扭矩受转差的影响,当转差在1 400 r/min附近时,电枢与磁极之间的动力传递效果明显。根据损失功率计算公式
(18)
分析可得,输入转速为定值,当控制转差一定时,输出转速n也为定值,传递扭矩T越大,则输出功率P越大。针对目标转差在1 400 r/min时,设计控制器并对其转差进行控制。提高电枢与磁极之间的扭矩传递性能。
3 转差自抗扰调节器设计
采用一阶LADRC,其机构简单,线性控制方便。基本控制模型见图9。
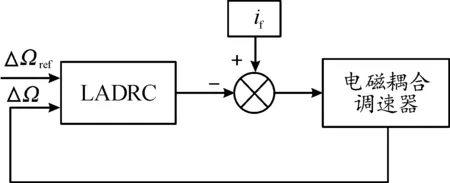
图9 电磁耦合调速器转差基本控制模型示意图
设定目标转差ΔΩref,通过LADRC控制器判断误差,调节励磁电流的值,实现控制转差的目的。
LADRC控制模型由比例微分器(tracking differentiator,TD),线性扩张状态观测器(liner extended state observer,LESO)与线性误差反馈(liner state error feedback,LSEF)组成。图10为一阶自抗扰模型。
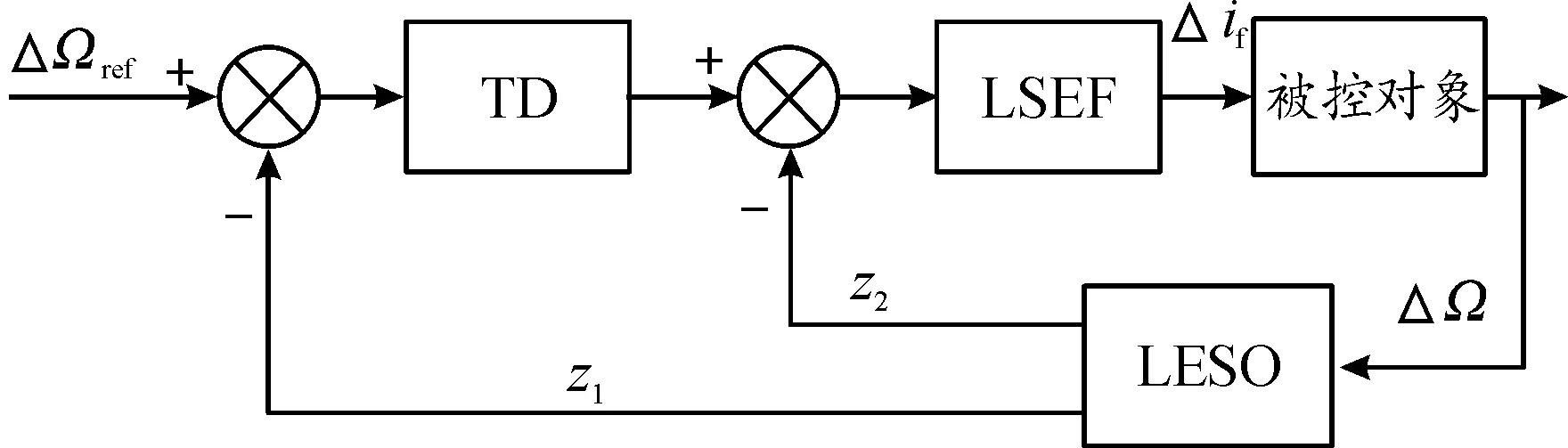
图10 LADRC控制模型示意图
在设定目标转差ΔΩref后,TD可迅速跟踪目标信号,将控制模型中的转差迅速接近ΔΩref。将当前误差传递给LESO进行误差放大,LESO再将信号传递给LSEF,通过误差反馈修正,输出励磁电流控制量Δif,调节转速差,使其迅速消除误差,达到ΔΩref。
3.1 TD设计
TD的设计目的在于迅速跟踪目标转差信号ΔΩref,可利用PID算法思想中的比例环节,通过设定误差的比例迅速跟踪目标值踪,设定比例为kp。
3.2 LESO设计
LESO的设计目的在于将当前转差输出值与当前励磁电流控制量之间的状态观测,将自身扰动与外界扰动相互抵消的策略,再将当前状态变量反馈给TD与LSEF进行进一步的自抗扰调节。LESO的设计核心为控制状态方程的设计。在图10中的LESO可设计为:
(19)
(20)
对上式整理可得:
(21)
3.3 LSEF设计
LSEF的设计目的在于将TD与LESO输出的反馈信号做误差调节,输出正确的反馈率,设计为常数调节,在仿真测试中进行测试。
4 自抗扰控制仿真
4.1 控制仿真模型
LADRC的仿真模型见图11,控制参数设置见表3。电磁耦合调速器转差控制仿真模型见图12,仿真参数见表4。
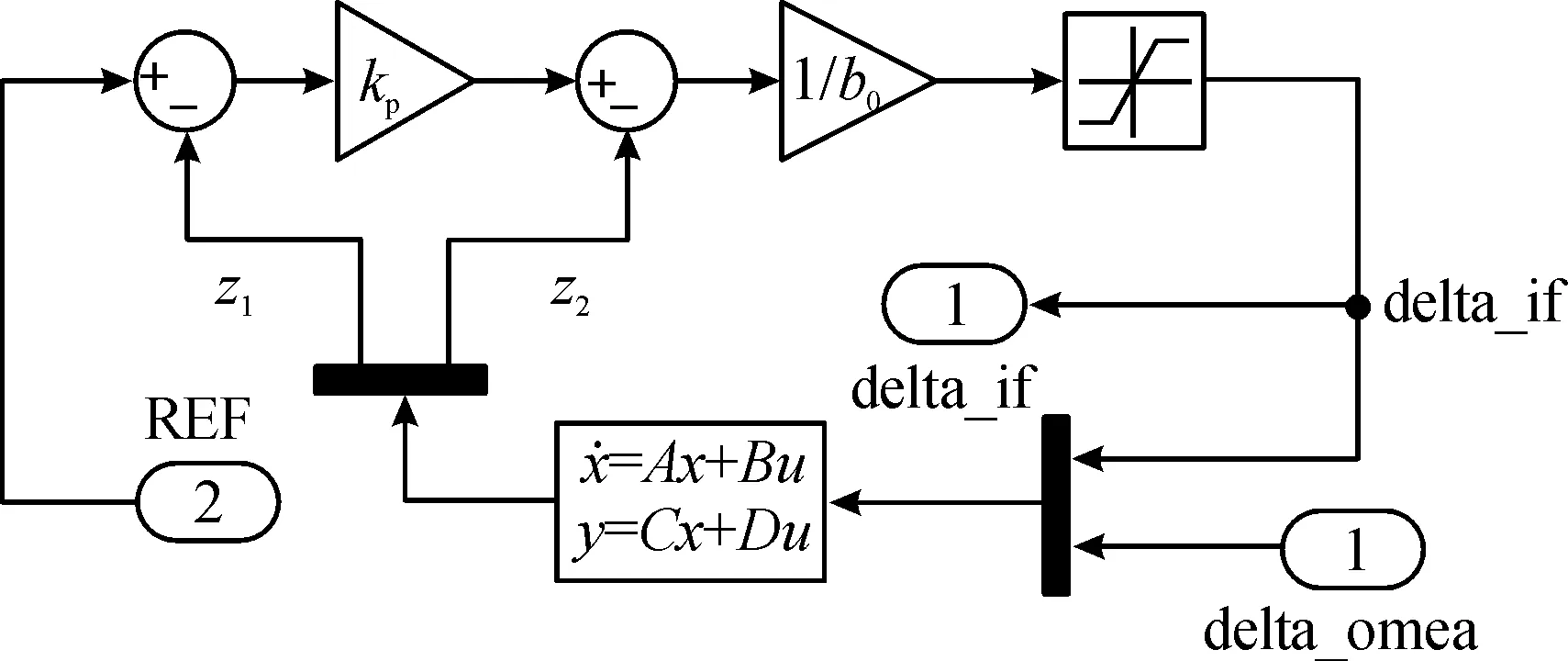
图11 LADRC仿真模型示意图
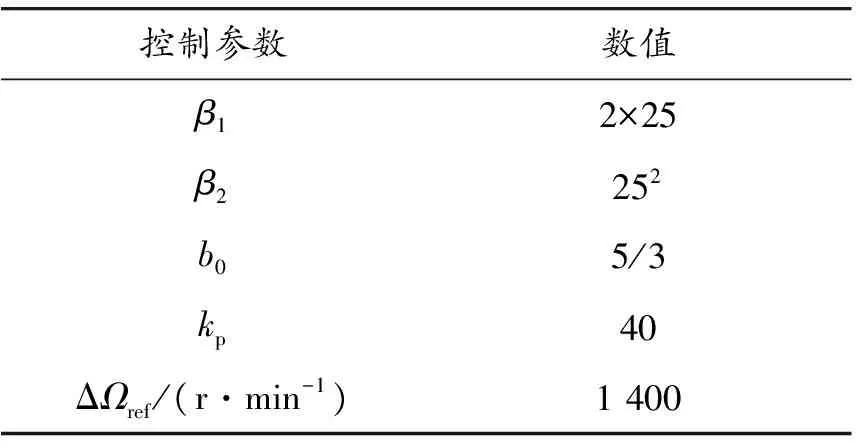
表3 仿真参数
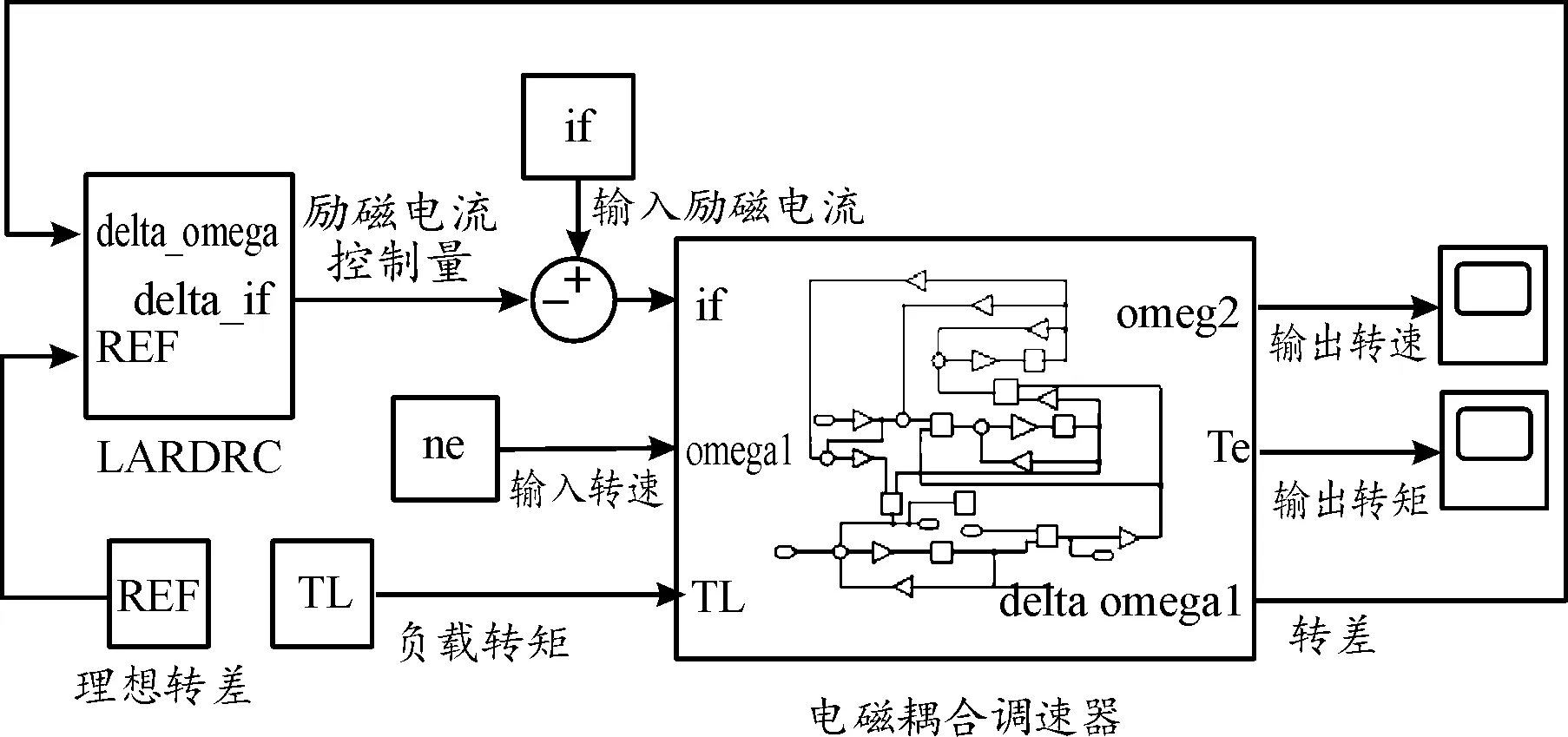
图12 电磁耦合调速器转差控制仿真模型示意图
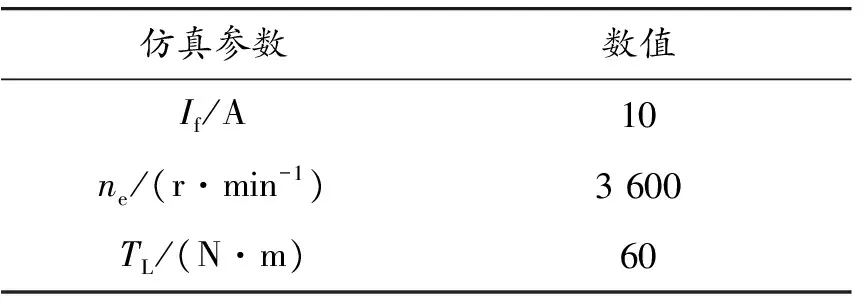
表4 电磁耦合调速器输入仿真参数
4.2 仿真控制效果
为了方便观测仿真效果,将LADRC与PID控制相比较,转差仿真效果见图13。其数值分析见表5。在相同励磁电流下,以不用控制算法的电磁耦合调速器模型为对照组,电磁转矩仿真曲线见图14,当前转差仿真曲线见图15。具体数值分析见表6。
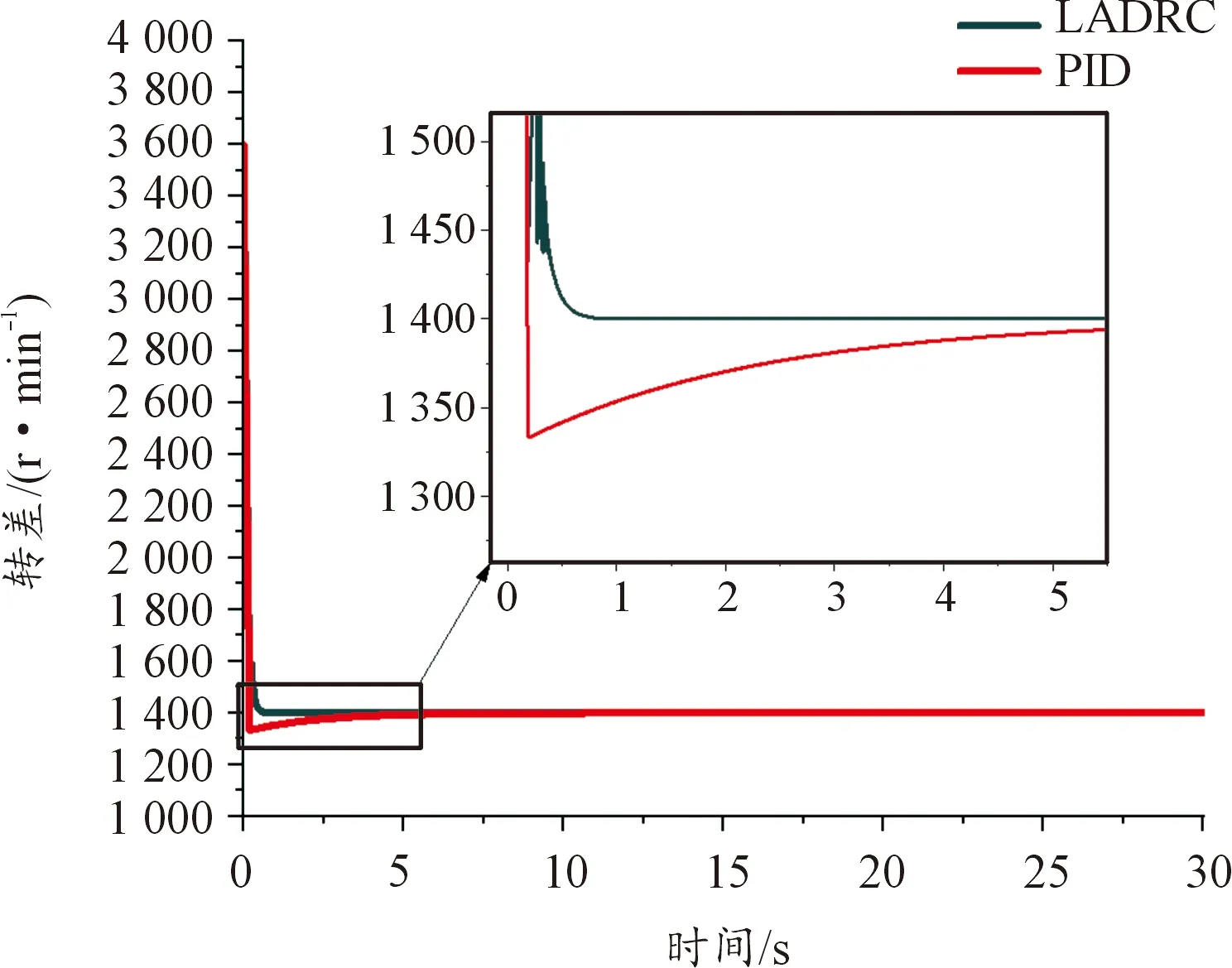
图13 电磁耦合调速器转差仿真曲线
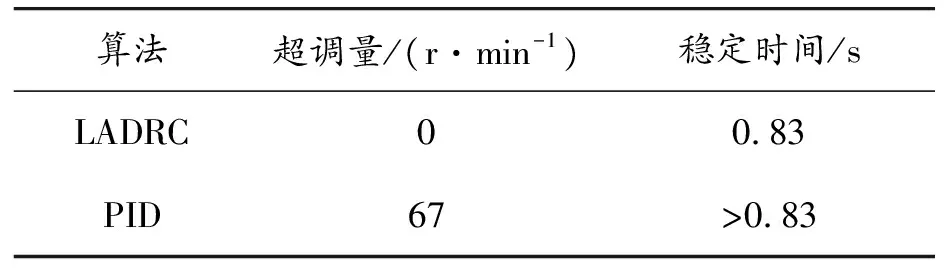
表5 转差仿真曲线数值分析
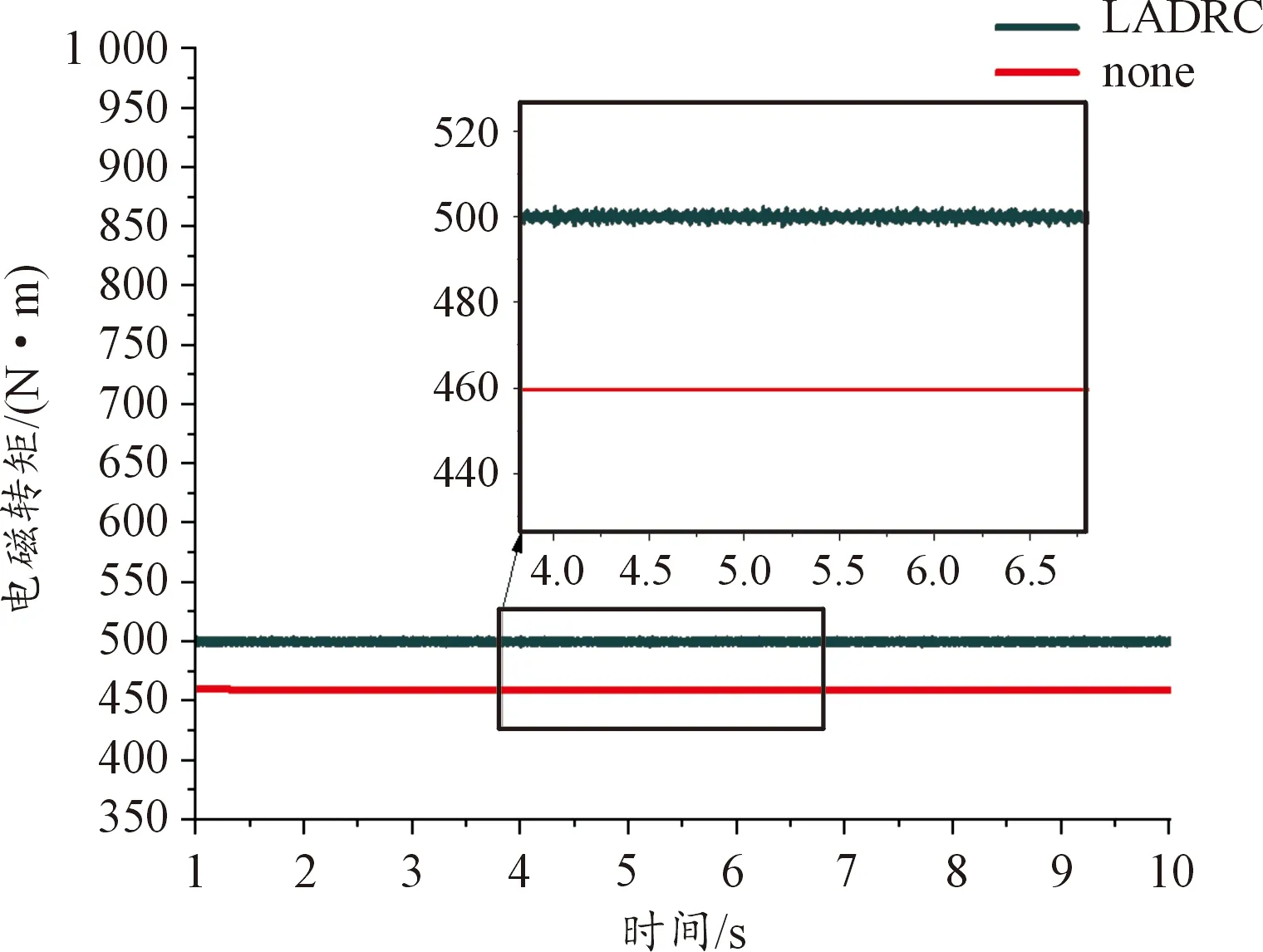
图14 电磁转矩仿真曲线
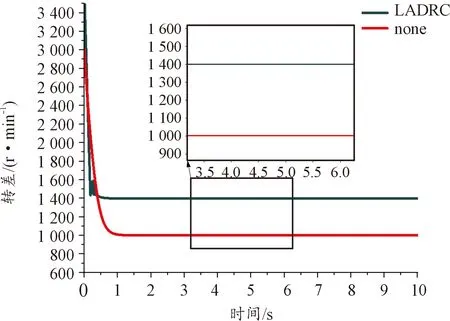
图15 转差仿真曲线
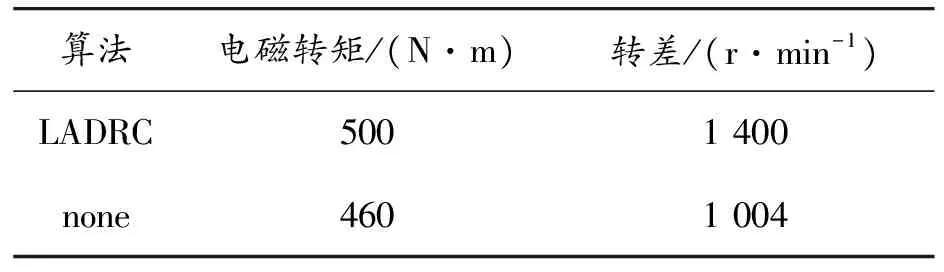
表6 具体数值分析
为了测验自抗扰能力的鲁棒性,在LADRC与PID同时稳定时,仿真时间第20 s加入20%的电磁扭矩扰动,观测其曲线变化,具体见图16,数值分析见表7。
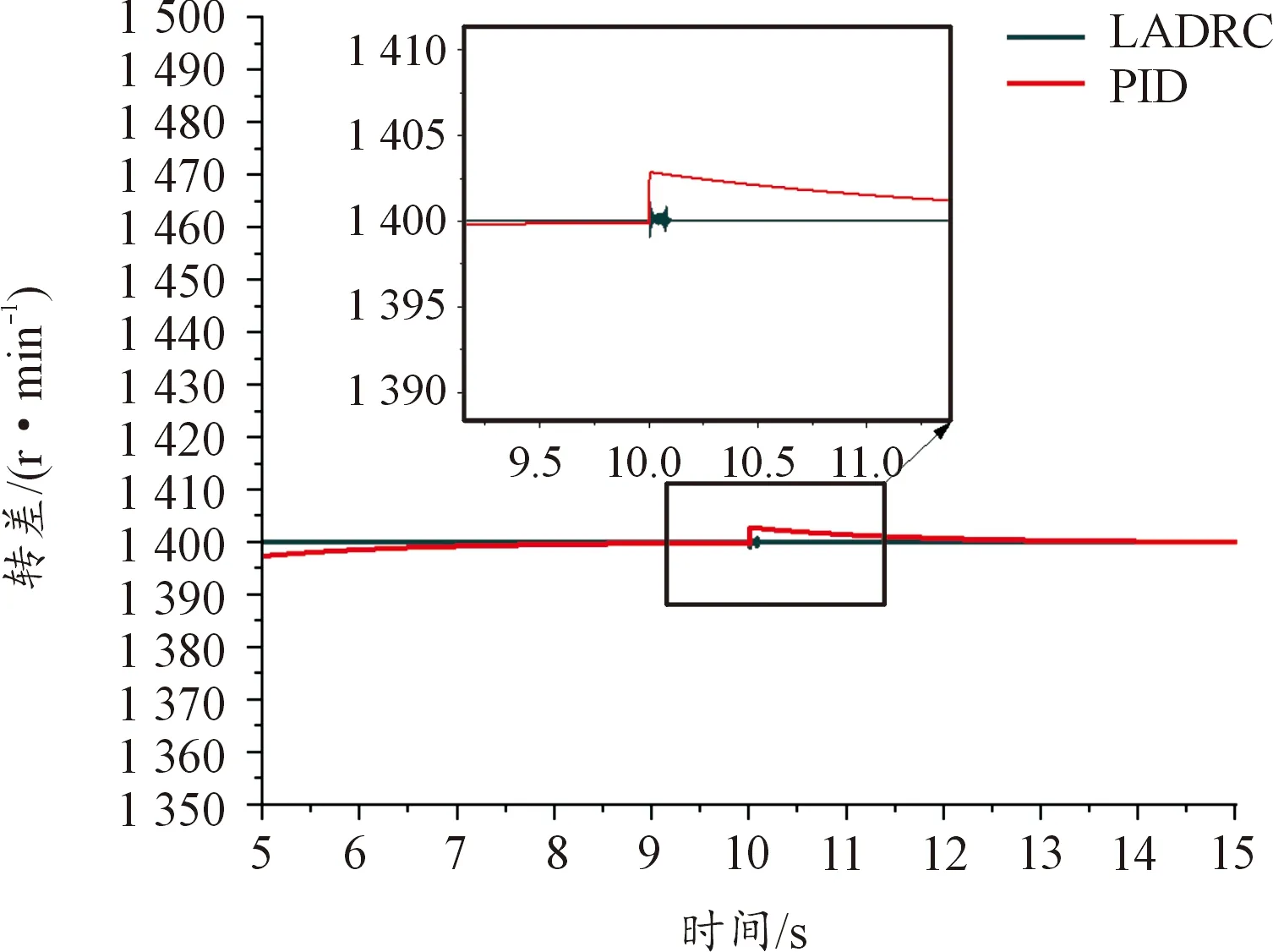
图16 抗扰动能力仿真曲线
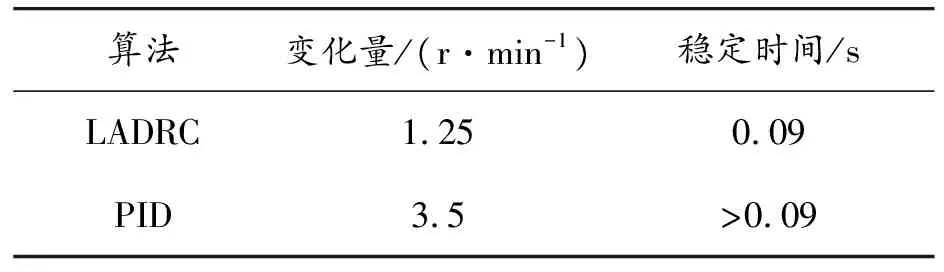
表7 转差仿真曲线数值分析
尝试在变负载情况下观测自抗扰的稳定性,在LADRC与PID同时控制稳定后,输入负载扭矩用随机噪声输出,具体见图17,效果图见图18。输出转速见图19。
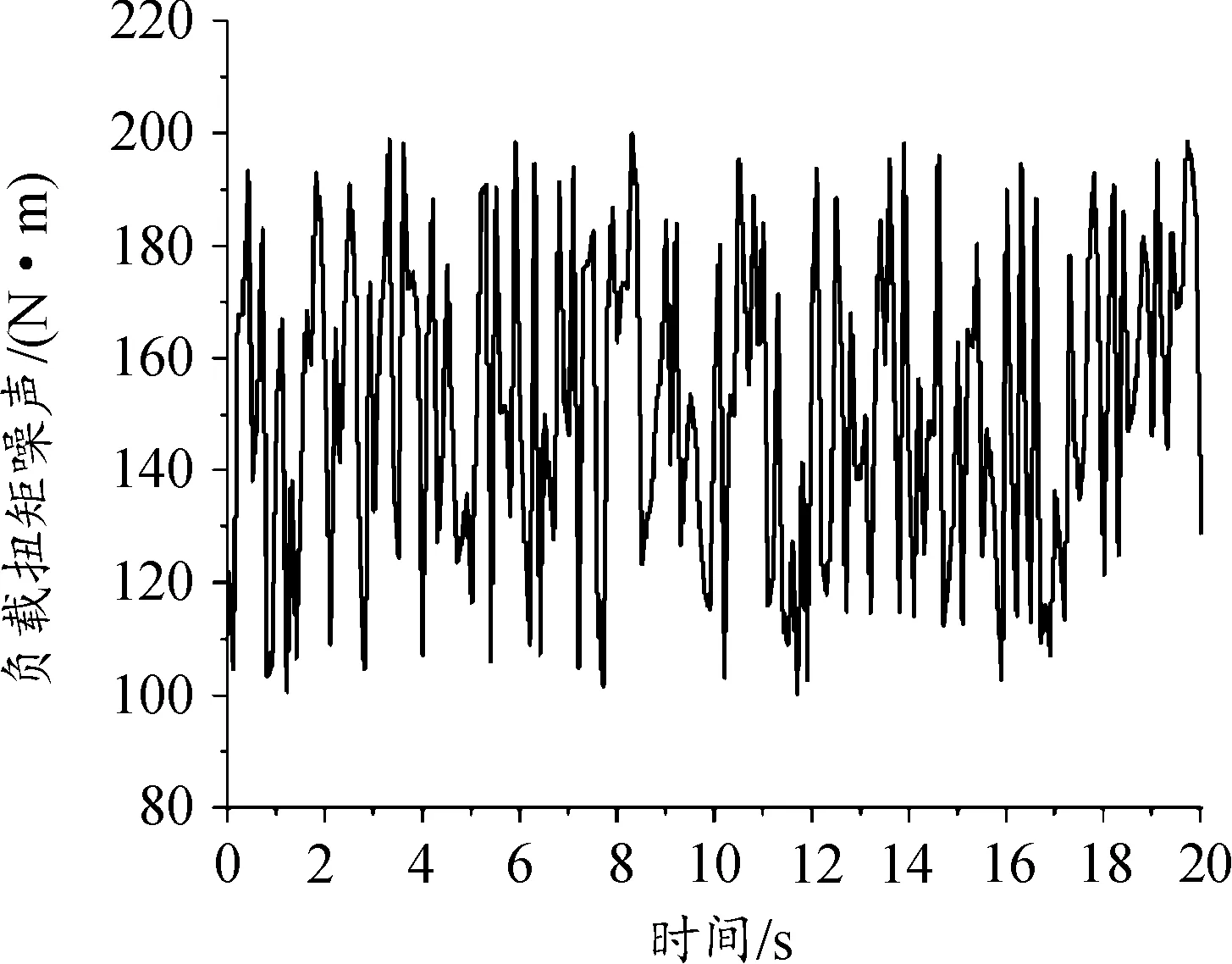
图17 负载扭矩噪声
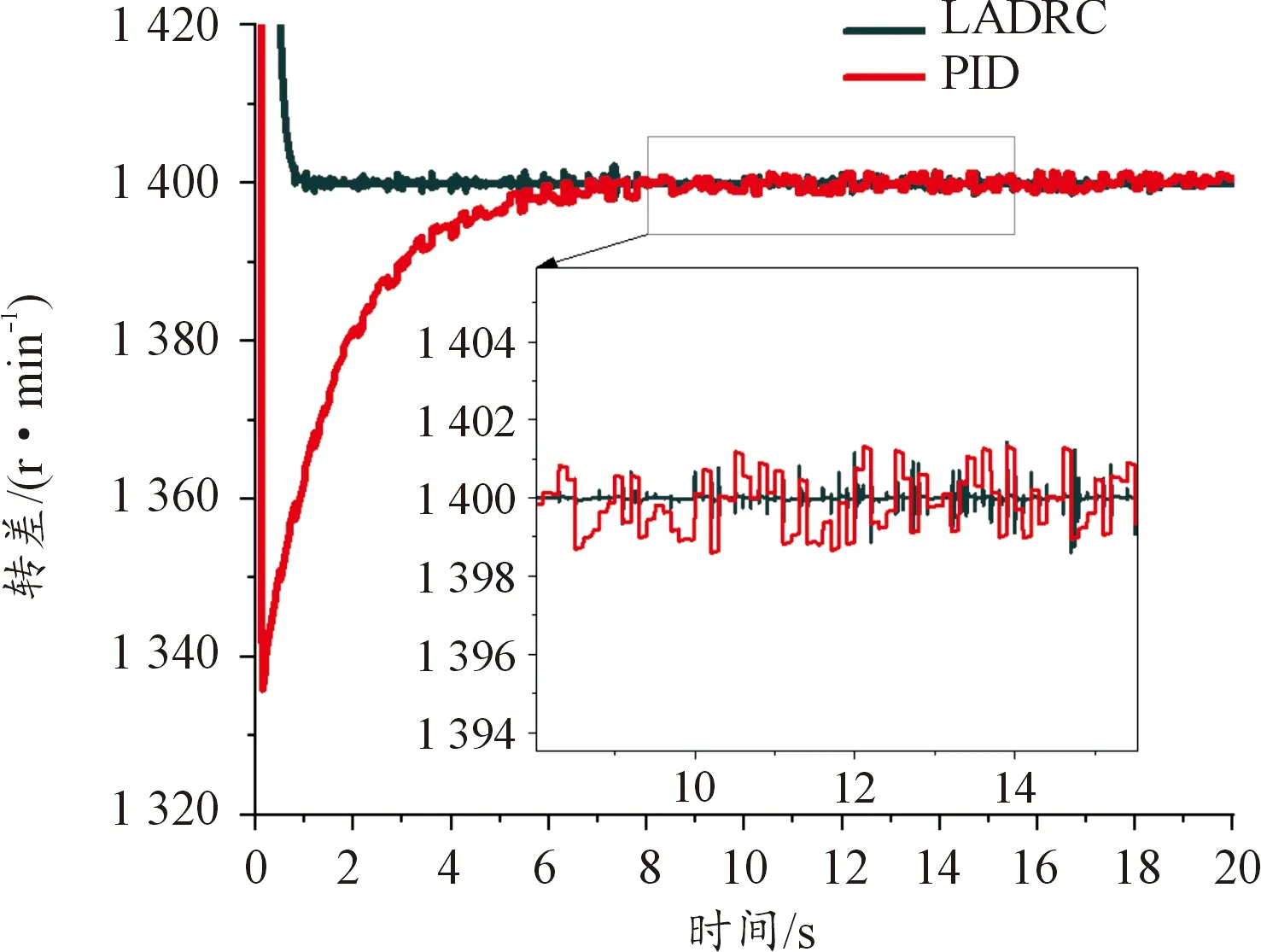
图18 抗噪声扰动能力仿真曲线
4.3 仿真控制效果分析
根据图13、表5分析可得,LADRC的转差控制效果要优于PID控制,能够避免超调,大幅缩短稳定时间。根据图14、图15与表6分析可知,控制合理的转差能够有效地提高电磁扭矩的大小。根据图16、图18、图19与表7分析可知,LADRC较于PID具有更好的鲁棒性,在外界干扰下,能够利用LESO的特性,将外界扰动与自身扰动相互抵消,提高了控制器的稳定性,在负载波动时保证了输出转速的稳定性。
5 结论
1) 仿真结果表明,电磁耦合的电枢与磁极之间的转差与电磁转矩存在非线性关系,当原动机输入转速一定时,合理控制其转差能够提高二者之间的电磁转矩。
2) LADRC较于传统PID控制具有更好的效果,提高了电磁耦合调速器转差控制的响应速度与稳定性,在负载波动时保证了输出转速的稳定性,提高了电磁耦合调速器的转速输出性能。
