考虑谐波电流的驱动电机振动噪声优化
2023-06-08戴佳钱曾发林徐求福王佳圣
戴佳钱,曾发林,徐求福,王佳圣
(江苏大学 汽车工程研究院, 江苏 镇江 212013)
0 引言
电动汽车驱动电机的振动噪声是整车振动噪声的主要组成部分[1]。驱动电机的振动噪声特性与传统内燃机有较大差别,除空气动力噪声与机械噪声外,由电机永磁体磁密与电枢磁密相互作用产生的具有阶次特性的径向电磁力是引起电机壳体振动并辐射产生噪声的主要原因[2]。通过优化电机径向电磁力改善电机振动噪声具有十分重要的意义。
国内外研究对电机径向电磁力的优化方法主要涉及结构优化与电流谐波优化。文献[3]分析总结了不同极槽配合和绕组层数电机的最低径向力波阶数,并指出力波阶数小的极槽配合更易引起较大的振动。文献[4]推导了转子分段斜极的径向力波解析式并通过调整分段数降低了电机的振动噪声。然而结构优化一般在电机本体设计阶段进行考虑,并且无法动态优化径向电磁力。优化谐波电流可以针对性地调整径向电磁力的时空分布,文献[5]提出了一种电机电磁振动噪声半解析模型,并分析了谐波电流对电机振动噪声的影响,为针对谐波电流的优化提供了参考。文献[6]分析了注入谐波电流优化径向电磁力的原理,并推导出了永磁同步电机径向电磁力波的谐波电流补偿模型。文献[7]基于多倍频电流注入法的径向振动抑制模型,设计优化算法实现了各频次径向振动的综合抑制。文献[8]针对分数槽电机中的低模数电磁力谐波,采用注入补偿电流的方式降低了电机的电磁振动。文献[9]分析指出对整数槽永磁同步电机振动噪声影响最大的是空间0阶次径向电磁力波。文献[10]分析了某车用永磁同步电机0阶径向电磁力波的主要来源,通过注入13次谐波电流的方法削弱了72阶次噪声。
本文以某8极48槽永磁同步驱动电机为研究对象,采用优化电机电流谐波的方式降低振动噪声。采集电机噪声信号并分析各阶次径向电磁力在不同转速下对电机振动噪声的影响,选择3 000 r/min转速为研究工况,使用实验噪声信号验证建立的磁固声耦合仿真模型。建立考虑电流谐波的径向电磁力解析模型,基于实验采样电流分析各部分径向电磁力时空特征。通过有限元方法仿真计算各定子齿至测点处的噪声传递函数,同时采用柯特斯公式计算各部分径向电磁力波作用于各定子齿的集中力,结合噪声传递函数与集中力基于线性叠加法得到测点处噪声预测模型。考虑谐波电流对转矩脉动的影响,将噪声预测模型代入遗传算法对拟注入谐波电流的幅值与相位进行寻优。仿真结果表明:优化后的谐波电流能够在不加剧转矩脉动的前提下有效降低电机的振动噪声。
1 驱动电机振动噪声信号采集及分析
1.1 实验设计与实施
本文研究对象为某永磁同步驱动电机,其主要性能参数如表1所示。在半消声室中将被测电机联接至测功机,并如图1所示在距离电机外包络面0.5 m测量面上布置传声器。采集电机在50%负载下从100 r/min匀加速至6 000 r/min时的瞬态振动噪声信号,以及电机在各稳态转速工况下的振动噪声信号,稳态转速以1 000 r/min为间隔选取1 000~6 000 r/min中的相应转速。
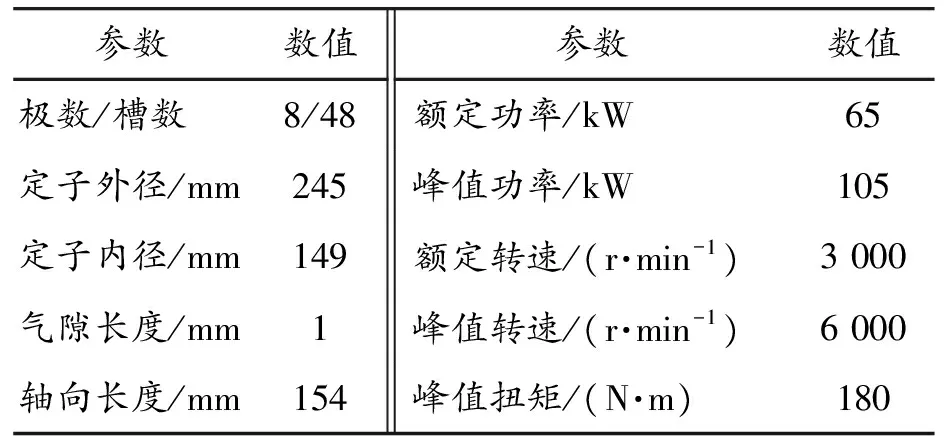
表1 驱动电机主要性能参数
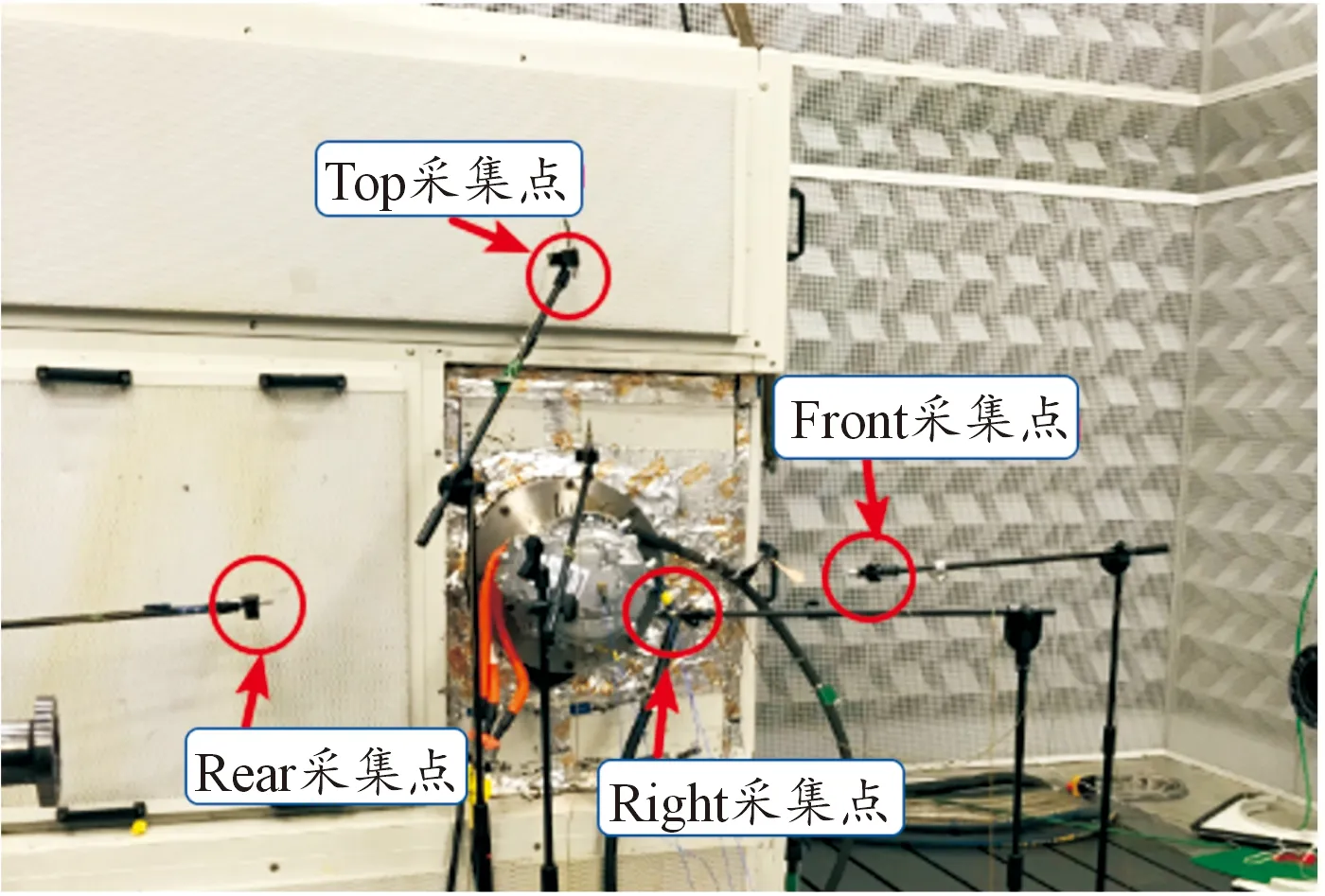
图1 驱动电机噪声信号采集测点布置
1.2 实验数据处理与分析
对匀加速工况下各振动噪声信号进行处理,得到全转速振动噪声信号频谱图,各测点的振动噪声信号在频谱图上表现出相似的特征,图2所示为Front测点全转速噪声信号频谱图。
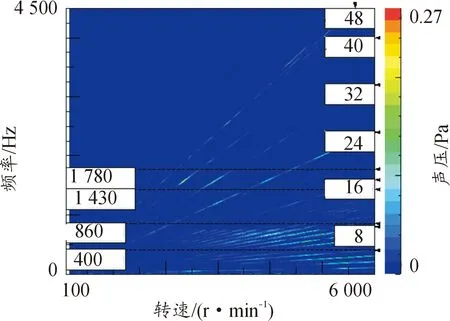
图2 Front采集点噪声信号频谱图
电机噪声存在明显的阶次特征,对于本文所研究的8极48槽驱动电机,径向电磁力的主要阶次等于极数的整数倍次,而8阶次作为最低阶次,主要由永磁体基波磁场作用产生[3],较难采用优化谐波电流的方式减小,所以这种情况不予考虑。由于电机本身的模态特性,在频谱图上可以看到存在400~860 Hz和1 430~1 780 Hz 2个明显的共振带,较低频的共振带处于机械噪声与较低阶次的径向电磁力活跃的频段内,而在较高频率的共振带区间内,24、32、40阶次的径向电磁力所引起的噪声有明显的加强。根据各阶次径向电磁力的影响严重程度,本文选择比较具有代表性的3 000 r/min转速作为优化研究工况。
1.3 磁固声仿真平台建立与验证
测点处的电机噪声需要经过磁固声耦合仿真计算得到,本文的仿真流程如图3所示。将 3 000 r/min转速工况下采样得到的电流输入二维电机模型中计算得到径向电磁力,施加由节点力法计算得到的集中力至电机定子齿,将得到的电机壳体响应代入声腔边界元模型中计算得到测点噪声。
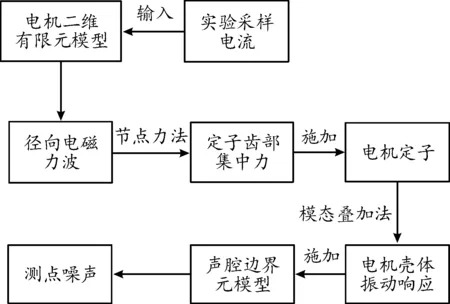
图3 磁固声仿真流程
其中,二维电机有限元模型根据表1参数建立,如图4(a)所示,电机壳体声腔模型如图4(b)所示。
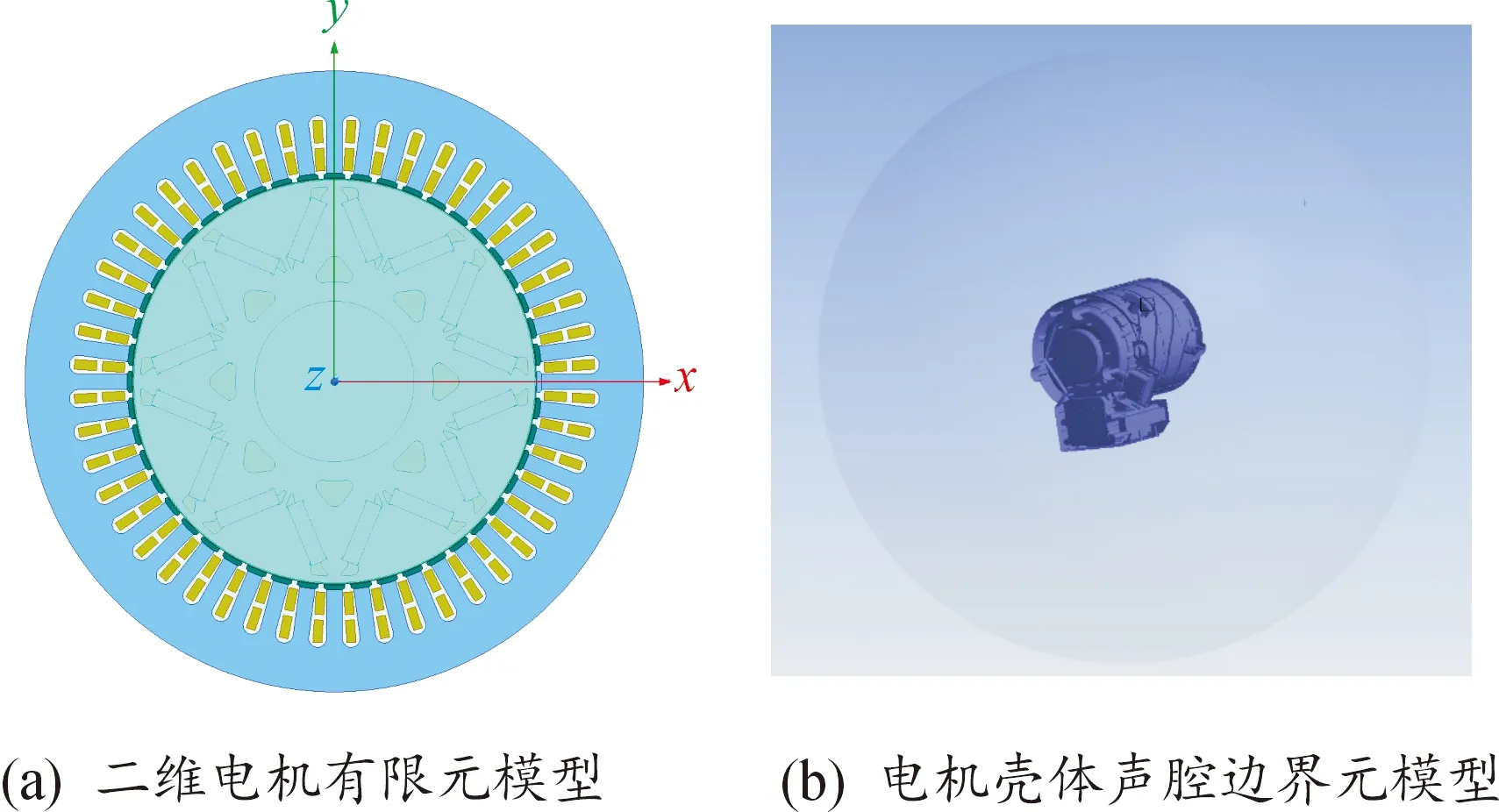
图4 电机有限元及壳体声腔边界元模型示意图
将仿真计算得到的噪声信号与实验采集得到的噪声信号进行对比,如图5所示。仿真信号在0~800 Hz之间的低频段与实验信号存在较大差异,因为该频段的噪声主要由轴承滚珠冲击和电机转子偏心等机械原因引起,对于研究所关注的低阶次径向电磁力所引起的噪声,仿真信号与实验信号保持了较高的一致性,说明该磁固声仿真模型具有较高的准确性,可用于后续研究。
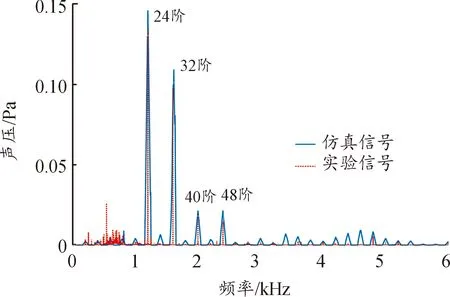
图5 Front测点处噪声仿真信号与实验信号
2 径向电磁力解析模型建立与阶次分析
2.1 径向电磁力解析模型
磁势磁导法是电机主要的解析建模方法之一[11]。本文研究的驱动电机为永磁同步电机,其磁动势由永磁体与绕组电流电枢反应两部分叠加得来,永磁体与单相绕组电枢反应所引起磁动势的解析式可以由式(1)、式(2)分别表示。永磁体与单相绕组电枢反应磁场产生的磁动势均含有空间2k-1次谐波,并且永磁体所引起磁动势的时间谐波来源于转子运动时空间谐波的变化,而电枢反应引起磁动势的时间谐波来源于绕组输入谐波电流随时间的变化,这使得电枢反应所引起磁动势的时间属性独立于空间属性。
(1)
(2)
u,v=2k-1,k=0,1,2,3,…
(3)
永磁体与电枢反应所引起磁动势的各阶次幅值可由式(4)与式(5)分别表示
(4)
(5)
式中:δ为气隙长度;Br为永磁体剩磁;τm为极弧角;μ0为真空磁导率;kdv为绕组分布因数;kpv为节距因数;c为绕组层数;p为极对数;q为每极相槽数;N为线圈匝数;a为并联支路数;m为电机相数。
为将电枢反应所引起磁势的时间与空间属性解耦,联立式(2)(5)两式并改写如式(6)。式(6)将电枢反应所引起的磁动势理解为绕组中通入的电流与单位电流下绕组产生的各空间阶次磁动势之积。
[Fhv_unitcos(vpα+φv)]
(6)
式中,Fhv_unit为单位电流作用下单相绕组产生的各空间阶次磁动势幅值。
气隙磁密由磁动势与气隙磁导如式(7)所示相乘得到,而计算定子开槽后的气隙磁动势较为复杂[12],为获得较为精确的考虑定子开槽的磁动势幅值,本文施加单位电流至有限元模型中计算获得单相绕组产生的各空间阶次磁密。而三相绕组产生的磁密叠加后的表达式如式(8)所示。
(7)
(8)
不同于绕组的静态分布,永磁体磁动势随转子转动,所以需要计算气隙比磁导以得到各转动角度位置的永磁体磁密分布[13]。本文参考文献[5]中提出的考虑径向与切向磁密相互贡献,通过有限元方法计算得到开槽前后的径向与切向磁密空间分布,根据式(9)计算得到径向比磁导。忽略切向磁密的贡献,永磁体所引起的径向磁密可由式(10)表示。
(9)
Brp(α,t)=Brps(α,t)λr(α)
(10)
式中:λr为径向比磁导;Btp为开槽后切向磁密;Brps为未开槽时的径向磁密;Btps为未开槽时的切向磁密。
根据麦克斯韦张量法,当不考虑幅值较小的气隙磁密切向分量时,径向电磁力波的表达式如式(11)所示。
(11)
将采样电流分别输入解析模型计算径向电磁力,图6为计算得到的气隙径向电磁力时空分布图。将解析模型计算得到的结果与有限元模型进行时间与空间2个维度上的对比,如图7所示。可以看到,解析模型计算结果与有限元模型相近,证明了解析模型的准确性。
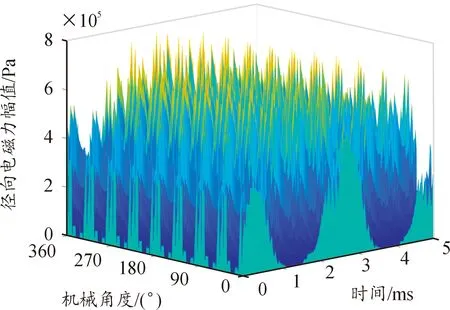
图6 解析模型计算所得径向电磁力时空分布图

图7 空间与时间维度下解析模型与 有限元模型径向电磁力
2.2谐波电流对径向电磁力贡献分析
谐波电流通过影响电枢反应磁场影响电机径向电磁力。为清楚地表示谐波电流引起的各时空阶次磁场如何作用产生相应时空阶次的径向电磁力,将式(1)与式(2)代入式(11),并将谐波电流能够影响的径向电磁力来源列出得到式(12)所示的电枢反应磁场相互作用表达式,及式(13)所示电枢反应磁场与永磁体磁场相互作用表达式。
{cos((h1+h2)ω0t∓(v1+v2)pα+
(φh1+φh2)∓(φv1+φv2))+
cos((h1-h2)ω0t∓(v1-v2)pθ+
(φh1-φh2)∓(φv1-φv2))+
2cos((h1+h2)ω0t+(v1-v2)pθ+
φh1+φh2+φv1-φv2)+
2cos((h1-h2)ω0t+(v1+v2)pθ+
φh1-φh2+φv1+φv2)}
(12)

{cos((h+u)ω0t∓(v+u)pθ+
(φh+φu)∓(φv+φu))+
cos((h-u)ω0t∓(v-u)pθ+
(φh-φu)∓(φv-φu))+
cos((h+u)ω0t∓(v-u)pθ+
(φh+φu)∓(φv-φu))+
cos((h+u)ω0t+(u-v)pθ+
(φh+φu)+(φv-φu))+
cos((h-u)ω0t+(u-v)pθ+
(φh+φu)+(φv-φu))}
(13)
归纳得到如表2所示基波与谐波电流引起的磁动势对各时间阶次径向电磁力的贡献情况,需要注意的是,由于幅值较小,这里没有考虑谐波电流引起的磁动势之间相互作用的部分。在本文所研究的3 000 r/min转速工况下,对测点噪声影响最大的是8p及6p阶次径向电磁力,其主要由5次与7次谐波电流引起。
表2 各磁动势分量对各阶次径向电磁力贡献
图8为3 000 r/min稳态转速工况下电机采样电流FFT分析频谱图,可以发现电机的主要谐波电流为5、7、11次,表3为三相电流中5、7次谐波的幅值与相位。
图8 3 000 r/min下PMSM A相电流频谱
表3 三相电流各阶次谐波参数
使用解析模型分别计算各磁动势产生的8p与6p时间阶次径向电磁力,并表示在极坐标系上,如图9所示。对于6p时间阶次的径向电磁力,其空间构成较为丰富,包括0、8与24空间阶次,并且各阶次均有相当的含量,其中由谐波电流引起的部分包括Fa1vFa5v、Fa5vFp1、Fa1vFa7v与Fa7vFp1。而对于8p时间阶次的径向电磁力,主要包含Fa1vFa7v与Fa7vFp1产生的8空间阶次分量与Fp1Fp7、Fp1Fp9、Fa1vFp7、Fa1vFp9产生的32空间阶次分量阶次,并且由于是由永磁体磁势或基波电流磁势作用产生,这部分径向电磁力无法通过调节谐波电流的方法进行改善。
结合径向电磁力的极坐标分布,可以由2个角度对其优化,一是减小电流幅值以减小径向电磁力幅值,二是调节谐波电流相位以优化各径向电磁力之间的时间相位关系。
3 测点噪声预测模型与贡献量分析
3.1 定子齿部至噪声测点传递函数分析
径向电磁力波是作用在定转子单位面积上的压力,而作用于定子齿部的径向电磁力对于电机的振动有决定性的影响[12],这部分径向电磁力可以等效为作用在各齿冠面上的离散力,如图10所示[14]。
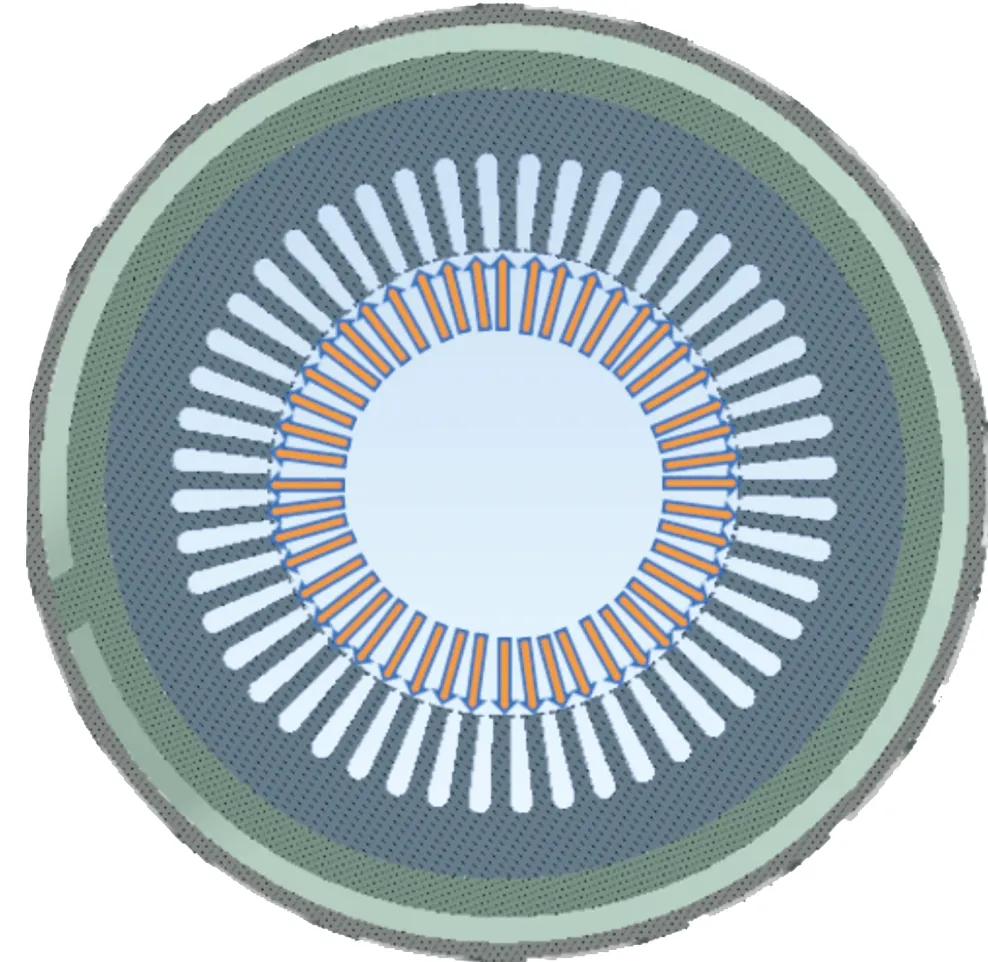
图10 径向电磁力作用于定子齿部示意图
电机壳体的振动在一定振幅范围内可以视作各定子齿上作用径向电磁力所引起振动的线性叠加,如式(14)所示,而测点处的噪声响应即叠加后所引起振动的辐射噪声在测点处的响应,如式(15)所示。于是,各齿部激励至测点处噪声传递函数可以表示为式(16),为获得测点处响应对于各定子齿处激励的传递函数,分别将单位扫频激励作用于各定子齿,图11为在某定子齿处施加单位扫频激励时测点噪声传递函数曲线。

(14)
(15)
(16)
式中:Fi(ω)为各定子齿上的集中力,i=1,2,…,48;HVij(ω)为壳体某点处的振动响应对于定子齿处激励的传递函数;HNj(ω)为噪声测点处响应对于壳体各点处振动辐射的传递函数。
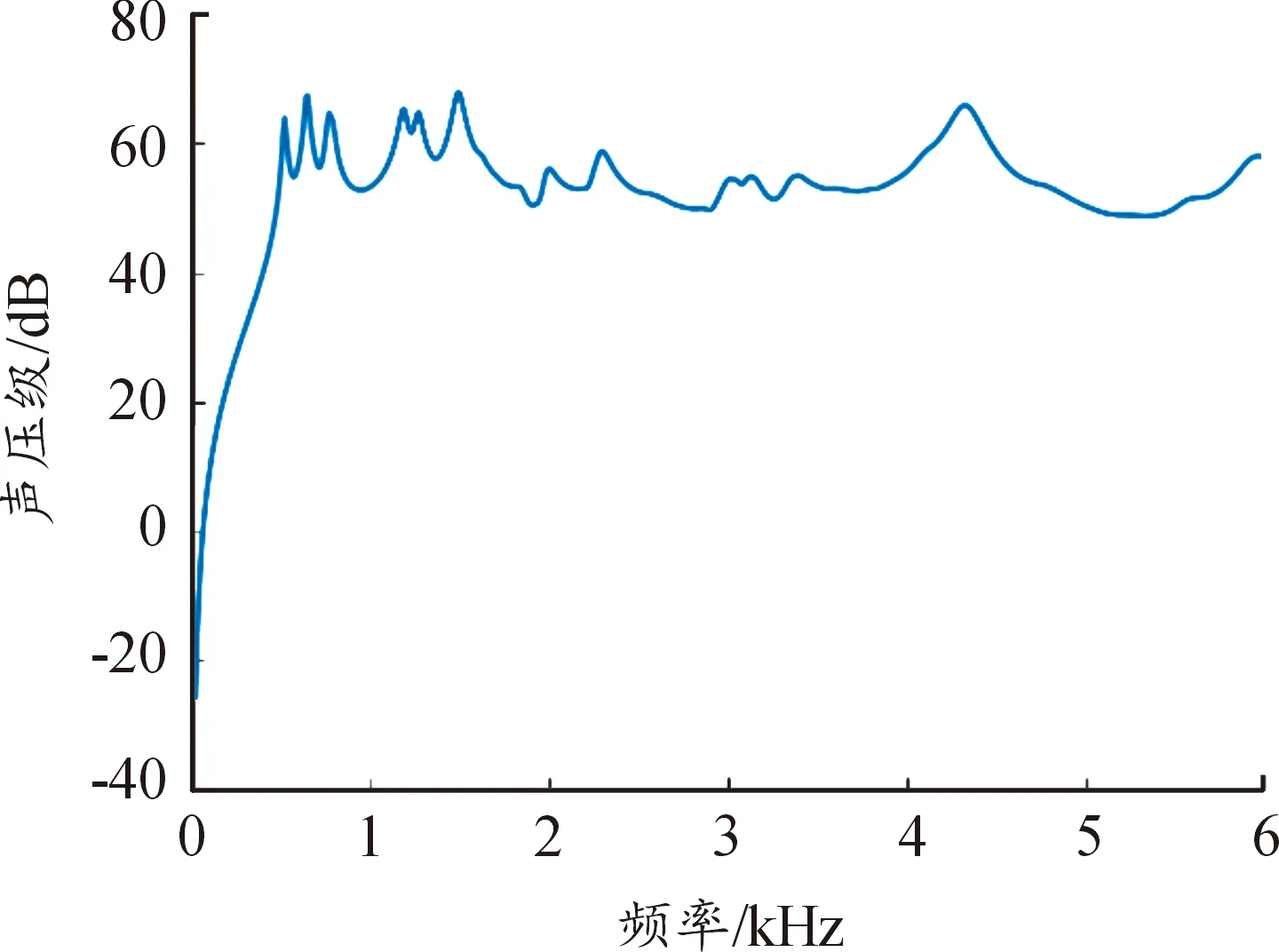
图11 某一定子齿至测点处噪声传递函数曲线
结合求得的48个齿部至噪声测点传递函数,测点处噪声预测模型由式(17)表示。
(17)
3.2 各时空阶次径向电磁力噪声贡献量分析
节点分布力法与面集中力加载法是计算径向电磁力波对定子齿部作用力的2种方法,本文采用文献[2]提及的面集中力加载法实现定子齿部集中力的计算。将每一个齿面的角度区间[α1,α2]四等分,并在每一个四分之一区间[βi,βi+1](i=0,1,2,3,4)应用柯特斯公式求解径向电磁力波在齿面上的定积分,得到的复合柯特斯公式近似解如式(18)所示。

(18)
式中:lr为定子轴向长度;rr为定子中心至定子齿冠半径;y为所求定子齿面在周向上的角度;βi+0.25=0.75βi+0.25βi+1;βi+0.5=0.5βi+0.5βi+1;βi+0.25=0.25βi+0.75βi+1。
将各磁动势分量产生的6p与8p时间阶次径向电磁力波代入上式中进行计算,得到如图12所示的各时空阶次径向电磁力在某一时刻作用于各齿部的集中力。根据奈奎斯特采样定理,本文所研究的48槽定子对于24及以下的空间阶次具有低通滤波效应[14],所以对于0、8、24空间阶次的径向电磁力波分量产生的作用于定子齿上的集中力能够反映出空间阶次特征,而对于32空间阶次的径向电磁力波,其产生的集中力的空间阶次表现为16阶次。

图12 各磁动势分量产生的集中力在各定子齿的分布
将各部分集中力代入噪声预测模型中计算,得到表4所示各部分径向电磁力对于测点声压对应频率的贡献量。由于测点声压是由各分量引起的噪声叠加而成,所以表中部分分量引起的声压幅值大于总声压幅值。各阶次噪声的主要分量均由较低空间阶次的分量引起,对于6p阶次,0空间阶次分量影响最大,而对于8p阶次,并不存在0空间阶次含量,但此频率接近定子共振频率,故8空间阶次所引起的噪声声压也较大。
4 基于遗传算法的寻优与仿真验证
谐波电流注入是一种抵消因逆变器非线性等原因而产生的固有谐波电流的重要方法,在抑制转矩脉动等应用中具有广泛的实践经验[15]。由于谐波电流对各时空阶次径向电磁力的影响较为复杂且相互之间存在耦合,采用遗传算法对注入谐波电流的幅值与相位进行寻优。优化思路如图13所示,将径向电磁力解析模型与噪声预测模型代入遗传算法中参与寻优,同时考虑谐波电流对电机转矩脉动的影响。
4.1 转矩脉动的解析模型
电机的转矩输出可以视作齿槽转矩tcog以及由电流与磁链相互作用产生的电磁转矩te的线性叠加。齿槽转矩不受谐波电流影响,且主要成分为电流频率的12与24阶次[16],可表示为式(19)所示的傅里叶级数。
t=te+tcog
(19)
tcog=Tcog12cos(12ω0t+φcog12)+
Tv24cos(24ω0t+φcog24)
(20)
式中:Tcog12、Tcog24分别是12阶与24阶齿槽转矩的幅值;φcog12、φcog24分别是12阶与24阶齿槽转矩的相位。
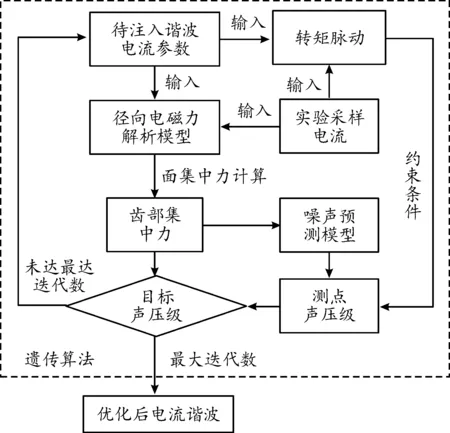
图13 注入谐波电流参数优化思路
对于电磁转矩,如式(21)所示,电流基波与磁链基波产生恒定转矩,脉动转矩部分主要由电流谐波与磁链基波,电流基波与磁链谐波以及电流谐波与磁链谐波3部分作用产生[17]。
te=1.5P(LdqIdq0+Λdq0)T×Idq0+
1.5P((LdqIdq0+Λdq0)T×idqh+
(21)
Λdq0= [Λ00]T
(22)
Idq0= [Id0Iq0]T
(23)
(24)
(25)
式中:Ldq为交直轴电感幅值;Λdq0为交直轴基波电流幅值;idqh为交直轴谐波电流;Λdq0为交直轴基波磁链幅值;λdqh为交直轴谐波磁链。
对比转矩解析模型与有限元计算结果,如图14所示,两者在转矩脉动特征上十分相似,最大脉动幅值均在21.1 N·m左右,精度足够,可以代入寻优算法中进行计算。

图14 转矩输出解析模型与有限元计算结果曲线
4.2 基于遗传算法谐波电流参数寻优
由于3 000 r/min工况下对噪声声压影响最大的是24阶次与32阶次所在频率即1 200 Hz与1 600 Hz,于是,遗传算法的适应度函数表示如下:
F=P(1 200)+P(1 600)
(26)
式中,P(f)表示某一频率处的声压。
能够对24阶及32阶噪声产生影响的是5、7次谐波电流,所以优化参数为5、7次谐波电流的幅值与相位。
D=[Ia5,Ib5,Ic5,Ia7,Ib7,Ic7,
φa5,φb5,φc5,φa7,φb7,φc7]
(27)
参数之间满足以下关系:
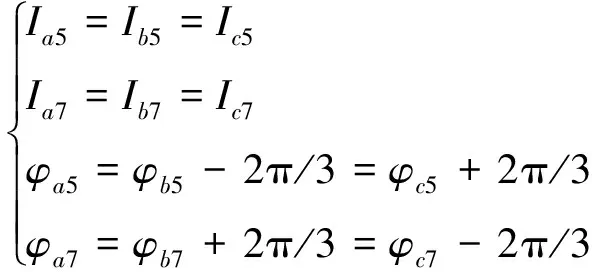
(28)
三相电流5、7次谐波可通过Park变换转换至d-q轴坐标系上的6次谐波,注入的电流在d-q坐标系下可表示如下:
(29)
注入谐波电流与原有电流共同产生的转矩输出为:

(30)
于是,为抑制转矩脉动增大而设计的约束条件表示如下:
(31)
图15所示为以测点声压为优化目标,基于遗传算法对注入谐波电流幅值相位参数进行寻优得到的适应度函数。最终由遗传算法计算得到的5、7次A相谐波电流的参数如表5所示,B、C相谐波电流可由式(28)计算得到。
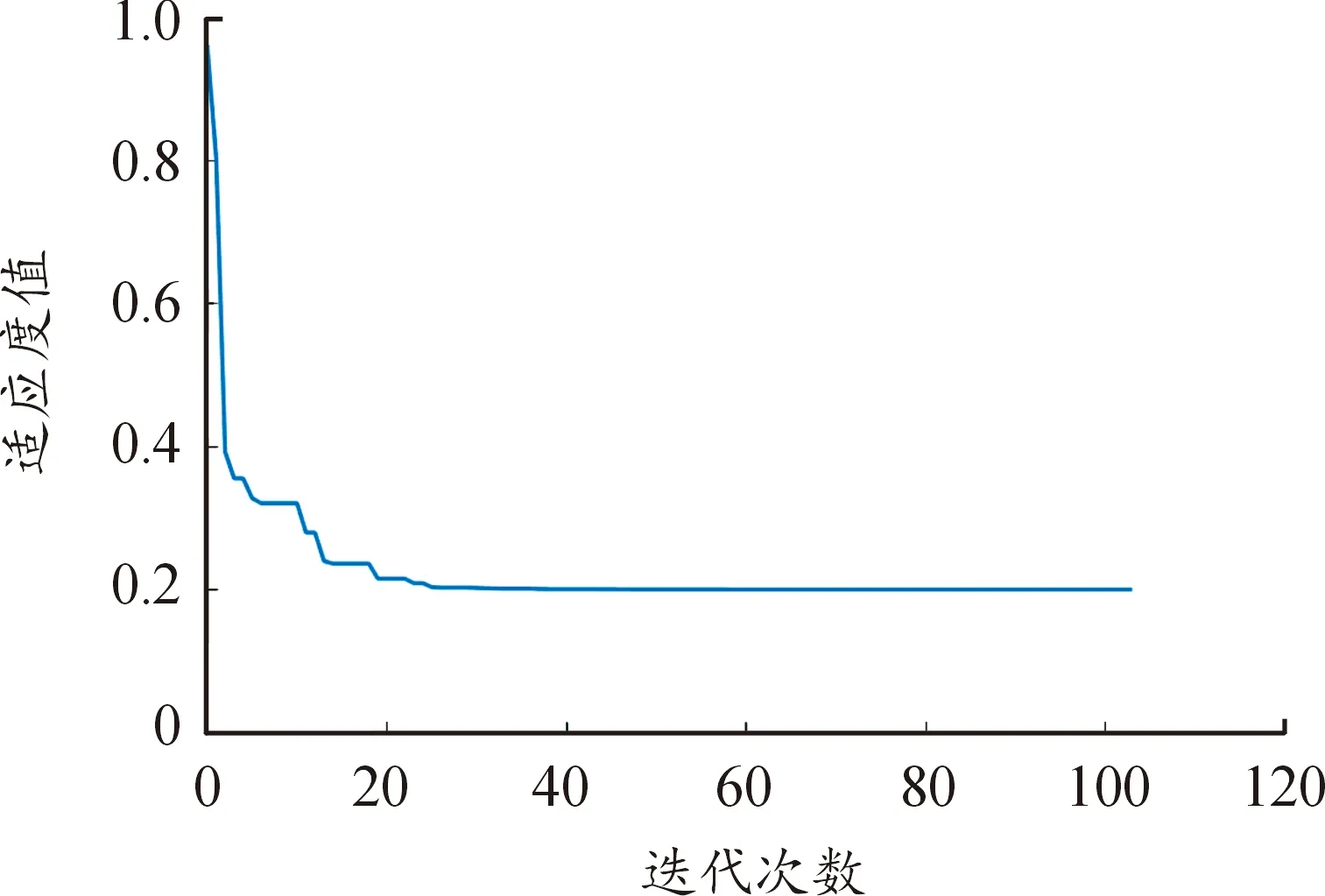
图15 遗传算法寻优谐波电流参数适应度变化曲线

表5 注入A相谐波电流最优参数
4.3 基于磁固声仿真平台的验证
为验证注入优化后谐波电流对各阶次噪声及转矩脉动的影响,将上述优化后的谐波电流与采样电流叠加后代入已建立的磁固声仿真平台中,计算得到测点处声压与此时的转矩输出,分别如图16—17所示。
表6归纳了各关注对象的优化效果,可以看到,本文重点关注的6p与8p阶次噪声在注入优化后的谐波电流后有明显的降低,与此同时,电机的转矩脉动也得到了有效的控制,没有因为谐波电流的改变而恶化。
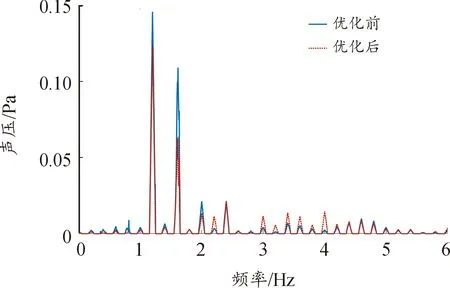
图16 测点处响应曲线
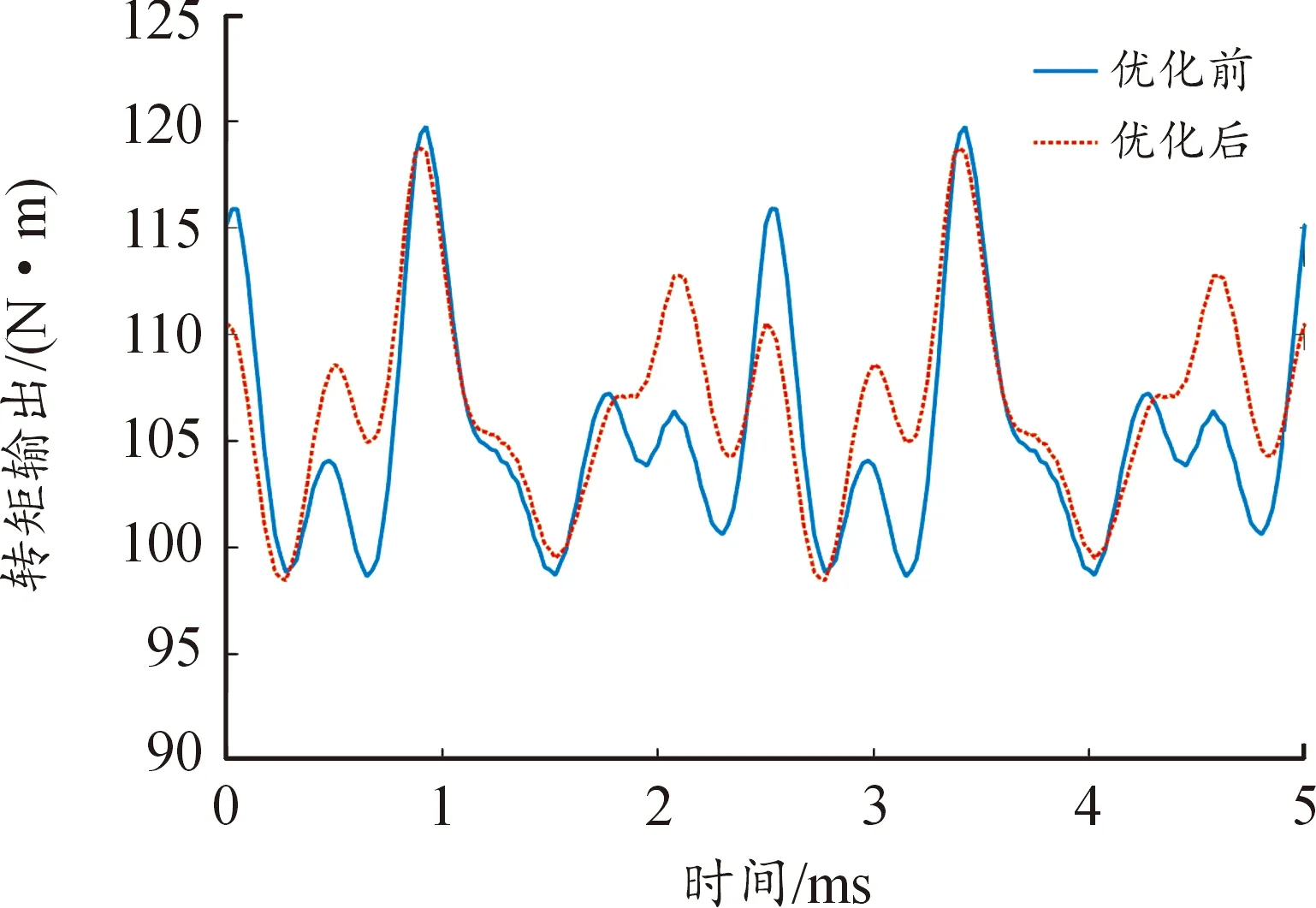
图17 谐波电流优化前后转矩输出曲线
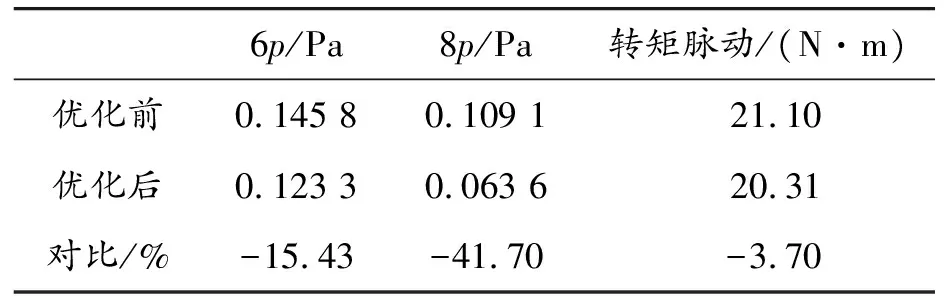
表6 谐波电流注入前后声压级与转矩脉动
5 结论
1) 采集了某驱动电机的噪声信号,分析噪声信号的阶次特征并认为6p与8p时间阶次对噪声声压影响最大。选择3 000 r/min为研究工况,建立了磁固声仿真模型并验证了其在阶次特征上与实验信号一致。
2) 基于磁势磁导法建立了径向电磁力解析模型,通过与有限元模型计算结果的对比验证了其准确性。根据谐波电流的阶次特征分析各时空阶次径向电磁力的组成成分,并代入解析模型中计算得到各阶次径向电磁力分量的时空分布。
3) 基于线性叠加法通过有限元方法得到定子齿至噪声测点传递函数,采用柯特斯公式计算各径向电磁力分量作用于定子齿的集中力,实现各分量对噪声测点声压的预测。基于预测模型,分析了各径向电磁力分量对测点噪声声压的贡献量,确定了5、7次谐波电流对主要阶次噪声的影响最大。
4) 将径向电磁力解析模型与噪声预测模型代入遗传算法中,在不增大电机转矩脉动的前提下对拟注入的5、7次谐波电流参数进行寻优。仿真结果显示,优化后的谐波电流能够在避免恶化转矩脉动的同时,有效减小主要阶次噪声。
