学前儿童对陪伴机器人的生命感知及其交互机制
2023-04-07李洁赵爽刁云慧郭士杰
李洁 赵爽 刁云慧 郭士杰


[摘 要] 从理论上说,作为新一代智能电子产品的儿童陪伴机器人在儿童陪伴与教育方面较电视和手机具有独特优势。本研究基于儿童认知发展理论,运用问卷法、情绪模拟法、行为观察法探究学前儿童对陪伴机器人的生命感知及其在交互中表现出的情绪唤醒和行为诱导效应。结果证实多数学前儿童认为陪伴机器人是具有情感属性的人工制品,愿意和陪伴机器人做朋友;随着年龄增长,学前儿童对陪伴机器人的情绪识别率和交互行为显著增加;当陪伴机器人出现悲伤、害怕、生气等负向情绪时,学前儿童会表现出显著的接近趋势和亲社会行为。未来关于儿童陪伴机器人的设计研发应考虑儿童的年龄差异,注重其对儿童亲社会行为的诱导,以更好地实现其辅助家长陪伴和教育儿童的功能。
[关键词] 学前儿童;陪伴机器人;人机交互
一、问题提出
电子产品对幼儿成长的正负向影响一直以来都是教育界研究的重要课题。伴随科技发展,以电视、手机、机器人为代表的电子产品依次进入家庭和幼儿生活。2021年9月国务院发布的《中国儿童发展纲要(2021—2030)》在儿童数字化媒介参与使用条例中强调,应保障儿童参与媒介的权利,提升其媒介素养,丰富其数字生活经验。步入人工智能时代,机器人成为新的智能媒介载体,智慧教育成为未来发展趋势,如何理解机器人对儿童发展的影响以及实施有针对性的教育策略成为幼儿教育的研究热点之一。
关于电视和手机对儿童成长影响的研究已开展多年,研究人员从多方面论证了其对儿童成长的正、负向影响,研究成果对儿童与机器人的相关研究有一定的启示作用。一方面,有研究者认为电视和手机对儿童成长存在消极作用:幼儿每周看电视时间与其执行功能呈负相关但纵向关联不显著,表明看电视对幼儿执行功能有即时的消极影响,但是看电视不能长时预测幼儿的执行功能;[1]屏幕暴露对儿童攻击性行为、情绪问题、注意力缺陷、同伴交往问题等有消极影响。[2][3]另一方面,一些研究发现电视和手机对儿童成长存在积极影响:儿童开始看电视的年纪越小,认知灵活性越高,观看电视时间越长,工作记忆越好,适度地观看电视可以促进儿童执行功能的发展;[4]接触含有教育性元素的影视节目或电子游戏的学前儿童会表现出较低水平的攻击性和更高频次的亲社会行为。[5]相关研究者认为电视和手机对儿童负面影响的主要原因有两点:第一,电视和手机占用了本应用于其他活动的时间,如看书、户外游戏、亲子交流、睡眠等;第二,儿童在面对电视和手机时是被动接收者,仅能做出被动的低水平加工,而难以获得真正意义上的深层理解。[6]也有研究者认为,电子产品对儿童的负向影响会受到家庭社会经济地位、父母的支持与陪伴、父母积极的态度、父母电子产品使用时间等因素的影响。[7][8][9]
儿童陪伴机器人作为新一代智能电子产品,在儿童陪伴与教育方面较电视和手机具有独特优势,从理论上来说可以在一定程度上减弱电视和手机在时间和交互方面的负向影响。首先,在交互形式上,机器人更接近人的自然交互,较电视和手机的非交互式和单向交互式有明显优势;其次,机器人通过智能算法和个性定制可以更好地管理儿童使用时间以及交互内容。当下“80后”、“90后”父母十分重视孩子的学习及情感培养,乐于接受新型智能产品,但他们工作任务繁重,陪伴孩子的时间不多,且国内“四老”代替父母养育孩子现象普遍存在,祖辈过分宠爱以及独生子女缺少同龄人互动的生活环境易造成儿童缺少同理心,“熊孩子”现象屡见不鲜。儿童机器人的情感陪护及教育辅助虽然无法代替父母的陪伴与监护,但是可以在一定程度上弥补父母情感缺位,丰富儿童情感交互。[10]有调查显示,37%的家长表示因各种原因没有时间陪伴孩子,30%的家长每天陪伴孩子的时间只有1~2小时,69%的家长认可购买机器人陪伴孩子并进行教育辅助,未来家庭对儿童机器人的需求可能会比较大。[11]
目前有关机器人对儿童成长影响的研究体系尚未发展完善。国外研究大多是利用实验验证的手段和方法开展研究,通过使用标准化的评估工具和参与观察来收集数据,国内相关实证研究较少。[12]缪杜瑟(Mioduser)和李维(Levy)发现儿童与机器人互动时,最想了解机器人是怎样移动的,更喜欢与机器人进行直接的肢體互动,这种有趣的肢体参与符合孩子直接体验式的学习心理。[13]贾纳卡(Janaka)研究了Bee-Bots儿童机器人的吸引力与年龄适宜性,发现机器人与情景教学的结合有助于提高孩子的参与度。[14]埃克(Eck)等人结合定性和定量的数据证明了机器人活动会正向影响幼儿园儿童的执行功能表现。[15]董(Tung)研究发现机器人外形和行为的拟人化程度会影响儿童对机器人的态度。[16]斯卡塞拉蒂(Scassellati)发现机器人可以帮助孤独症儿童学习社交技能,起到“社交拐杖”的作用。[17]此外也有诸多研究表明儿童与机器人交互对其学习、社会行为和幸福感存在有益影响。[18][19][20][21][22]国内对于儿童与机器人的交互研究主要集中在机器人辅助治疗儿童孤独症方面:陈东帆等通过实证研究发现机器人有助于改善孤独症儿童的社交能力、专注力与行为能力;[23]鲍海丽通过实证研究发现人形机器人干预联合体感游戏对孤独症儿童有较好的干预效果,可改善其情感状况,提高其社交行为;[24]王永固通过实证研究发现社交机器人能增强孤独症儿童社交兴趣和情绪唤醒,缓解社交回避,诱导社会互动行为主动发生;[25]许艳凤等研究表明教育机器人提供的多样交互模式以及适应性教学策略,能够维持儿童的注意力和参与度,与传统的屏幕呈现式技术相比,实体机器人可以提供三维且有形的世界,儿童主动与交互式机器人接触学习具有更高的效率。[26]国内关于正常发育学前儿童与机器人交互的研究这一块几乎处于空白,正常发育儿童与机器人的交互方式同孤独症儿童在机器人外形偏好、行为反馈上均有差异,沙姆苏丁(Shamsuddin)等研究发现,孤独症儿童更偏爱非生命特征外形机器人。[27]
综上,机器人作为智能时代的代表性产品已经开始进入家庭,其对儿童的影响在交互和管理方面较电视手机等电子产品具有优势,亦受家长青睐。然而,国内关于儿童与机器人交互研究,尤其是实证性研究还处于空白,关注本土文化下机器人对儿童成长影响具有十分重要的理论和实践意义。国外儿童机器人教育研究除了运用教育学理论以外,还引用了人工智能等跨领域视角,用以揭示儿童以何种方式与机器人进行互动,多视角的研究可以为儿童成长教育带来更丰富、更全面的视野。[28]本研究基于人机交互理论,面向机器人设计视角,从认知和行为两方面探究机器人与儿童交互过程中的情绪唤醒和行为诱导效应,研究结果有助于儿童陪伴机器人的设计研发,从而更好实现其陪伴及教育目的。
二、研究对象
儿童陪伴机器人的受众群体主要是学前儿童。3~6岁是儿童脑部快速发育期,也是幼儿认知能力迅速发展的关键时期。学前儿童对事物本体论的区分影响其与机器人的交互。吉普森(Jipson)和格尔曼(Gelman)表示儿童在认知发展过程中对于物体生命性的判别,具有本体论上的坚定性和概念上的开放性。[29]3岁儿童已经能够从本体论区分生物和非生物,4岁儿童可以在全部属性上区分生物和非生物,儿童对于物体生物属性区分明显,而对于超过了生物学特征的心理属性判断则更多地受到物体是否具有面部特征的影响。[30]范斯特拉滕(Van Straten)等提出儿童对机器人的认知是一种社会性和类人的存在。[31]吉安诺普卢(Giannopulu)等通过对比儿童与人类和机器人的交流模式,发现儿童会将与人类同伴的互动模式复制到与机器人的交流中,这说明了儿童对人类和机器人的交流具有潜在的相似性。[32]通过对比儿童与人类、机器人和物体的交互研究,吉安诺普卢等发现儿童与机器人的亲密程度介于他们与人类和无生命物体的亲密程度之间。[33]
3~6岁儿童的认知发展影响其与机器人的交互模式。3~5岁儿童对物体认知能力随年龄的增长而提高,4岁是儿童前额叶开始发育的关键时间点,3~4岁时期幼儿的热执行功能水平高于冷执行功能水平,4岁之后个体冷執行能力开始得到迅速发展,尤其是抑制功能的发展使得个体的情绪刺激干扰认知控制显著降低。[34]在定势转换上,幼儿在4岁左右进入发展的转折与关键期,在4岁半至5岁进入抑制的迅速发展阶段;在工作记忆上,幼儿约在5岁时步入工作记忆的快速发展期,相较于3岁半至4岁半的幼儿,5岁半至6岁半的幼儿的记忆规则和使用规则的能力更强。[35]儿童和机器人的交互与其年龄有关,学龄期的儿童似乎比学龄前期的儿童对机器人的交互方式更为挑剔和敏感。[36]对于不同年龄儿童对机器人的体验差异,范斯特拉滕等指出较年幼的儿童对机器人的交互方式不太敏感,比较年长的儿童能体验到更多的乐趣,更容易出现拟人化倾向和效果。[37]
综上,面向3~6岁儿童与机器人的交互机制开展研究,探究机器人是否较电视及手机具有交互优势。实证研究作为一种研究范式,主张科学结论的客观性和普遍性,强调知识必须建立在观察、实验以及经验的基础上。课题从认知和行为两方面探究机器人与儿童交互过程中的情绪唤醒和行为诱导效应,研究包括生命感知、情绪识别和行为测量三部分。儿童对于机器人的生命感知与机器人造型相关,也是儿童情绪识别和行为互动的基础;儿童对机器人情绪识别是情感交互的基础,为机器人实施陪伴提供可能;儿童与机器人的行为交互是对机器人交互效果的重要测量指标。
三、研究方法
研究方法包括问卷法、情绪模拟法、行为观察法。生命感知问卷基于吉普森(Jipson)和格尔曼(Gelman)生命感知问卷改编,已在多个研究中得到应用。[38][39][40][41][42]情绪识别研究采用情绪模拟程序与问卷调查方法,实验程序基于赞恩-瓦克斯勒(Zahn-Waxler)等设计的痛苦模拟范式改编,[43]包含四种情境,机器人分别展示快乐、生气、害怕、悲伤四种情绪。行为交互编码系统由赞恩-瓦克斯勒及其同事编制,[44]黄翯青等人将该编码系统应用于中国幼儿共情研究。[45]为适用于本研究涉及的具体情境,对上述编码系统进行一定调整,选取接近趋势、亲社会行为、交互主动性、关注指标进行记录。
(一)被试
本研究选取天津市市区某幼儿园40名儿童(19名男孩, 21名女孩)作为被试,3岁、4岁、5岁、6岁儿童各10人。所有被试均自愿参加实验,实验内容与幼儿园教师提前沟通,得到儿童父母同意,儿童实验后获得礼品。
(二)实验材料
市场上常见的儿童陪伴机器人分为桌面型和移动型,桌面型机器人如几何型机器人阿尔法蛋和人形机器人悟空,移动型机器人如轮式机器人巴迪(Buddy)等,它们都具有拟人形的外观及表情,具备会话、唱歌、跳舞等娱乐功能,远程监控、语音等陪护功能以及学习资料查询等教育功能。
实验选用优必选和腾讯叮当联合研发的儿童智能陪伴机器人悟空作为实验对象。悟空全身共有14个自由度可以灵活展示舞蹈及动作,①眼部配有1.22英寸液晶屏显示表情动画,同时具有智能语音交互功能。悟空机器人程序中带有动作库和表情库,经由课题小组对库中41个表情样本和31个动作样本进行情绪聚类,将动作和表情组合成快乐、生气、害怕、悲伤等情绪样本16个。对组合样本的愉悦度、唤醒度和优势度评分,挑选出最具识别性的四种情绪样本各1个。给实验样本编辑语音交互内容以触发机器人动作和表情反馈,最终形成悟空机器人快乐、生气、害怕、悲伤4个情绪实验样本。
(三)实验程序
1. 实验步骤。
实验正式开始前,实验员向所有儿童介绍悟空机器人,由机器人展示两段舞蹈以消除儿童的紧张感。实验安排在一间安静的教室,出于对儿童安全及心理舒适的考虑,每次实验由两名女性实验员和两名同龄儿童参与,实验过程全程由摄像记录。实验设计包括机器人自我介绍和四种情绪模拟情境,情绪模拟情境分为情绪原因、情绪表达、交互请求与提示三个部分,每个情境结束后对被试进行情绪识别提问。
自我介绍情境。实验员语音唤醒悟空机器人:“悟空,给小朋友介绍一下你自己!”悟空:“小朋友你好,我是悟空,如果想看我表演功夫就说‘悟空悟空,表演功夫吧!’”同时伴有转头和眨眼动作。被试主动语音唤醒,“悟空悟空,表演功夫”,触发悟空功夫表演。如果被试没有主动唤醒,实验员会鼓励并等待10秒,如果被试仍没有唤醒则由实验员唤醒。悟空表演功夫21秒,伴有动作和表情。
快乐情境。表演结束悟空询问:“我的功夫还不错吧?”实验员提示被试说唤醒词“悟空悟空,你真厉害!”被试主动语音唤醒,否则由实验员唤醒。悟空说“谢谢”伴随快乐情绪的动作和表情,随后悟空说“握个手吧”伴随握手动作和快乐表情。被试主动握手,否则实验员鼓励被试并等待10秒钟,若被试仍未进行握手动作则由实验员代替。实验员提问:“悟空机器人高兴吗?”被试进行是否回答或进行详细原因描述。
生气情境。实验员表现出使用道具时不小心击打到悟空机器人,说出唤醒词“悟空悟空,不好意思”。悟空头部转向实验员说“你弄疼我了”并展示生气情绪的动作和表情,然后说“小朋友,我的腿很疼,你能给我揉揉吗?”被试主动帮悟空揉腿,若被试未行动,实验员鼓励被试并等待10秒。若被试仍未帮助机器人,则由实验员完成帮助动作。实验员提问:“悟空机器人生气了吗?”被试进行是否回答或进行详细原因描述。
害怕情境。实验员将道具虫子放在悟空右脚旁,提示被试说出唤醒词:“悟空悟空,你脚下有个虫子。”被试主动语言表述,如果被试没有主动唤醒,实验员会鼓励并等待10秒,如果被试仍没有唤醒则由实验员唤醒。悟空展示惊恐情绪的动作和表情,随后悟空说“我最害怕虫子了,你能帮我拿掉吗?”被试主动帮助悟空把虫子拿开,若被试未行动,实验员鼓励被试并等待10秒,如果被试仍未帮助机器人,则由实验员将道具拿走。实验员提问:“悟空机器人害怕了吗?”被试进行是否回答或进行详细原因描述。
悲伤情境。实验员向被试表明接下来要与悟空告别,提示被试说出唤醒词“悟空悟空,我要走了”。被试主动语言表述,如果被试没有主动唤醒,实验员会鼓励并等待10秒,如果被试仍没有唤醒则由实验员唤醒。悟空展示悲伤情绪动作和表情,随后悟空说:“我舍不得你,你能抱抱我吗?”被试主动上前拥抱机器人,若被试未行动,实验员鼓励被试并等待10秒,如果被试仍未行动,则由实验员代替拥抱机器人。实验员提问:“悟空机器人伤心了吗?”被试进行是否回答或进行详细原因描述。
2. 问卷调查。
情绪识别问卷由实验员根据实验过程中儿童的情绪识别结果进行填写,正确识别计1分,错误识别计0分。
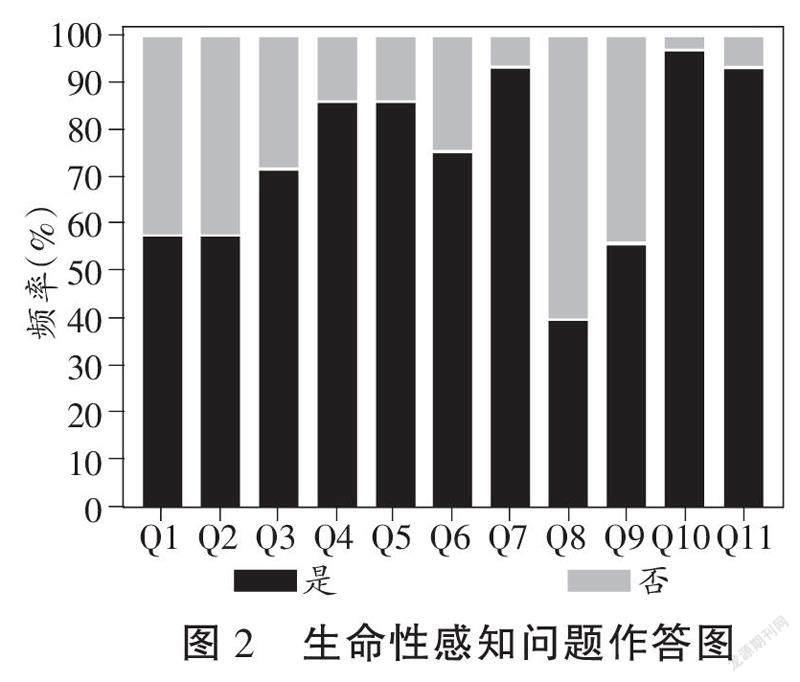
生命感知问卷由实验员在情境实验结束后对被试进行访谈时填写。机器人生命感知问卷包含生物属性、心理属性、知觉属性、人工属性、属性投射、命名属性6个维度,以及儿童对机器人的交友意愿。生物属性问题为“你觉得机器人是否需要吃东西”(Q1)和“你觉得机器人能够长大吗”(Q2);心理属性问题为“你觉得机器人能够思考吗”(Q3)和“你觉得机器人能够感受到快乐吗”(Q4);知觉属性问题为“你觉得机器人能够看见东西吗”(Q5)和“如果你碰到机器人,你觉得它能够感觉到吗”(Q6);人工属性问题为“你觉得机器人是某个人做出来的东西吗”(Q7)和“你觉得机器人会受伤吗”(Q8);属性投射问题为“你觉得机器人能够帮忙做家务吗”(Q9);命名属性问题为“你觉得机器人能够拥有一个只属于自己的名字吗”(Q10);交友意愿问题为“你愿意和悟空做朋友吗”(Q11)。实验员在进行回答后继续追问相关原因并进行记录。实验结束后将得到的“是”或“否”进行记分处理,回答“是”计1分,回答“否”计0分。
3. 數据处理。
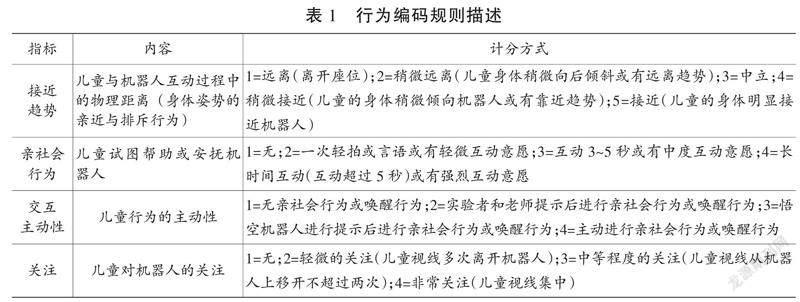
问卷数据采用SPSS 26.0统计,分析儿童对陪伴机器人的生命特征感知和情绪识别情况。行为编码使用ELAN 5.9统计,编码规则见表1。一名实验员依照实验录像对被试的接近趋势、亲社会行为、交互主动性和关注开展行为编码。另一名实验员抽取20%录像片段再次编码,数据采用SPSS 26.0统计。一致性检验结果显示,行为编码各指标kappa在0.64到1.00之间,显示出较高的评分者一致性。
四、研究结果
(一)被试对陪伴机器人生命特征的感知情况
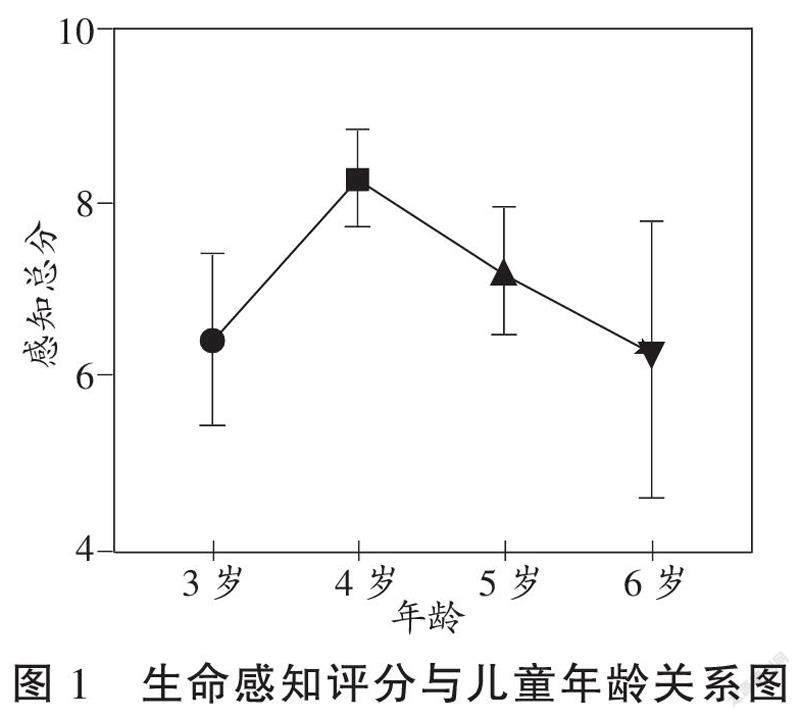
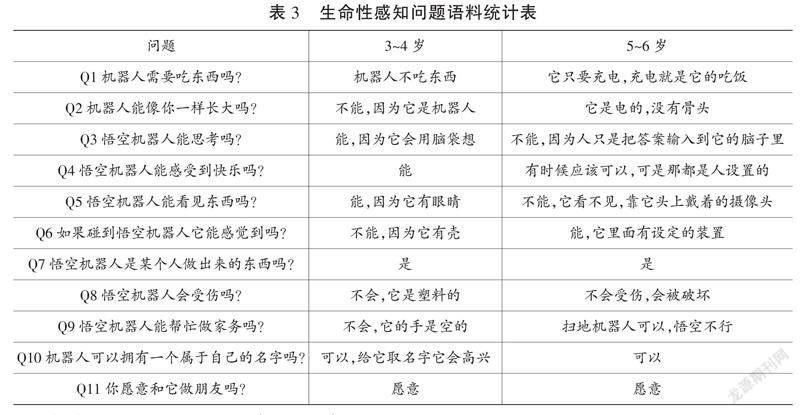
机器人生命感知问卷统计结果如表2所示,儿童对机器人的生命感知评分呈现3~4岁上升、4~6岁下降的趋势,4岁儿童评分最高(见图1),但儿童年龄和性别对机器人生命感知影响不具有显著性。整理访谈过程中被试的回答语料(见表3),结果显示3~4岁儿童偏向基于机器人外形(手、脚、眼睛、头等)认知机器人,例如3岁儿童回答“机器人能看见,因为它有眼睛”。而5~6岁儿童基于自身认知经验认知机器人,例如6岁儿童回答“机器人会思考是因为有人把答案提前输进去”。生命性感知问题统计结果如图2所示。Q7“悟空机器人是某个人做出来的东西吗”肯定回答占92.9%,说明多数被试能分辨出机器人的人工制品属性;Q4“悟空机器人能感受到快乐吗”肯定回答占85.7%,说明多数被试认为机器人能感受到快乐;Q10“机器人可以拥有一个属于自己的名字吗”肯定回答占96.3%、Q11“你愿意和它做朋友吗”肯定回答占92.9%,说明多数被试愿意给机器人起名字、跟机器人交朋友。
研究结果发现:3~6岁儿童将陪伴机器人看作具有情感的人工制品,并且愿意与其进行情感交互;儿童与机器人交互过程中,3~4岁儿童主要通过机器人拟人化外观及交互特征认知机器人,而5~6岁儿童随着认知能力提升,更多基于自身知识经验认知机器人。
(二)被试对陪伴机器人的情绪识别情况
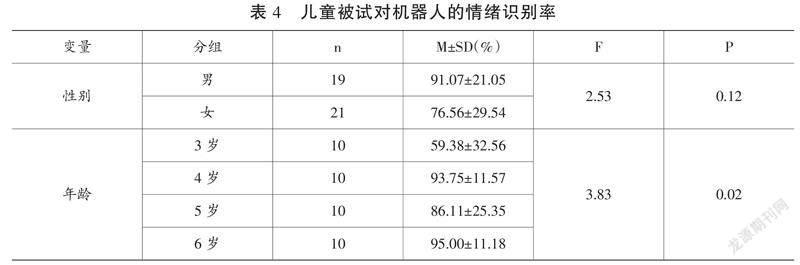
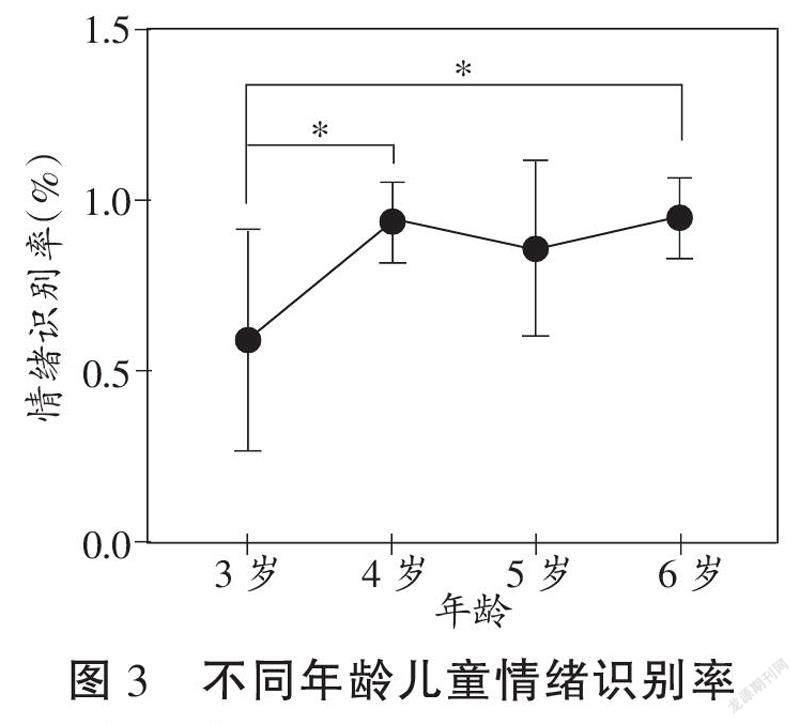
使用t检验和单因素方差检验分别探究儿童被试性别和年龄与其对机器人情绪识别率(以下简称“情绪识别率”)的关系,结果见表4。t检验结果显示,儿童被试性别与情绪识别率无显著相关性(P>0.05)。单因素方差结果显示,儿童被试年龄与情绪识别率显著相关(F=4.44, P=0.02)。邦弗伦尼事后检验结果显示,3岁儿童的情绪识别率显著低于4岁儿童(P=0.03)和6岁儿童(P=0.03)。(见图3)
(三)被试与陪伴机器人的行为交互情况
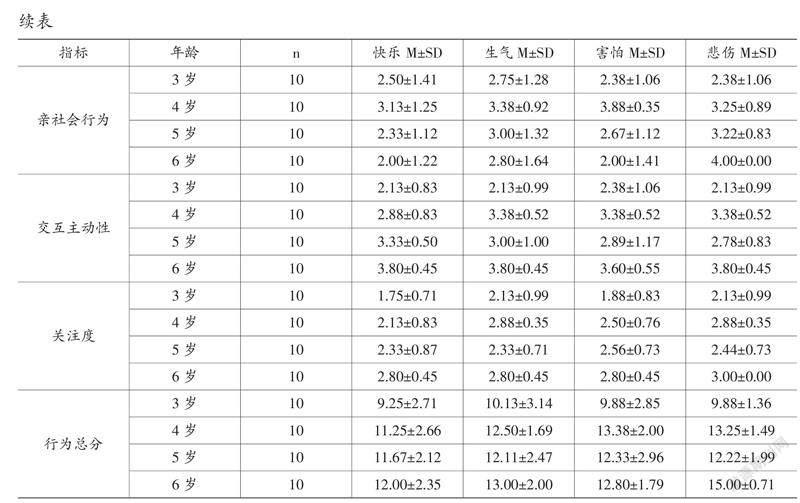
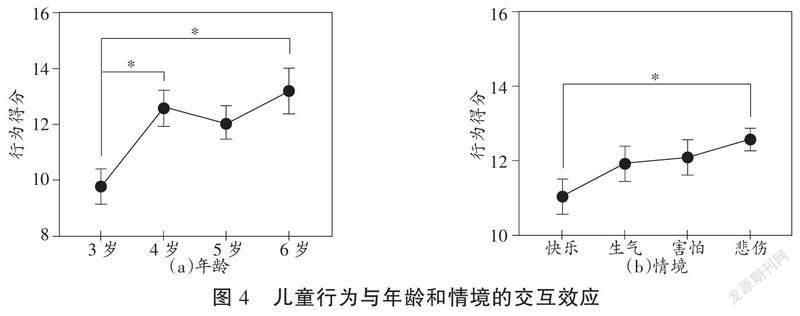
儿童行为编码描述性统计结果如表5所示。使用4(3岁、4岁、5岁、6岁)×4(快乐、生气、害怕、悲伤)两因素重复测量方差分析被试在机器人四种情绪下的交互行为差异,年龄(受试者间因素)和情境(受试者内因素)是自变量,行为编码(接近趋势、亲社会行为、交互主动性、关注)和行为总分是因变量。结果显示,年龄的主效应在接近趋势(F=3.44,P=0.03,偏η=0.28)、交互主动性(F=7.19,P<0.01,偏η=0.45)和关注度(F=3.29,P=0.04,偏η=0.28)中显著,儿童被试与机器人交互过程中接近趋势、关注度、交互主动性随着年龄增加而增强。情境的主效应只在接近趋势(F=5.45,P<0.01,偏η=0.17)和亲社会行为(F=3.85,P=0.02,偏η=0.13)中显著,儿童对机器人的接近趋势在害怕情境中最强,悲伤情境次之,其次是生气情境,快乐情境最弱,儿童对机器人的亲社会行为在悲伤情境中最强,生气情境次之,害怕情境较弱,快乐情境最弱。年龄(F=5.09,P<0.01,偏η=0.37)和情境(F=4.31,P=0.01,偏η=0.14)对行为总分的主效应显著,交互行为总分随年龄增加而上升,悲伤情境行为总分最高,害怕和生气情境次之,快乐情境行为总分最低,如图4所示。此外,未发现儿童性别对交互行为的影响。
研究结果发现,3~6岁儿童与机器人的交互行为随年龄增加而显著提升,4~6岁儿童在和机器人交互过程中的接近趋势、交互主动性和关注度显著高于3岁儿童,且3~6岁儿童在机器人呈现悲伤、害怕、生气等负向情绪时表现出更显著的接近趋势和亲社会行为。
五、讨论
首先,生命性感知是儿童与机器人双向交互的基础,3~6岁儿童对机器人生命性感知受事物本体论区分的影响。电视和手机作为媒介产品,是物,不具有生命性和情感性,儿童在与电视和手机的交互中是被动的接受者。机器人作为人工智能产品,属性十分特殊,从生物本质上属于无生命的人工制品,但从人机交互角度看又具有情感的生命属性。儿童怎么看待机器人属性十分重要。实验结果表明,3~6岁儿童可以清晰认知机器人并不是生物学意义上的生存状态,但在心理属性和知觉属性上认为机器人具有感知性和情感性,并且儿童愿意跟机器人交朋友,表现出积极的互动意愿和行为。相比电视和手机等媒介产品,机器人更具有陪伴优势。该结果亦证明机器人突破了以往工业产品物的属性,成为介于物和人之间的具有情感属性的形式载体,儿童交互意愿和积极性亦不是以非物的属性为判断依据,人机交互已从被动接受发展到双向交互,从功能交互发展到情感交互,更为复杂。
其次,3~6岁儿童的认知发展影响其与机器人的交互模式,表现为机器人外形及交互对儿童认知与行为的影响效应。3~6岁儿童对物体认知能力随年龄的增长而提高,4岁之后个体的情绪刺激干扰认知控制显著降低,儿童有意识的自主交互行为增加。研究结果显示,3~4岁儿童对机器人生物属性、心理属性和知觉属性的认知受机器人形态的影响,认为机器人有眼就能看,有手就能摸;而5~6岁儿童随着认知能力的提升,更多基于自身知识经验认知机器人,知道机器人能看能说与其形态上的眼和嘴没有直接关系。且随着年龄的增长,4~6岁儿童对机器人的情绪识别和交互行为显著提升,面对机器人有更加主动的交互行为,因此通过机器人交互设计诱导儿童体验式交互行为,符合儿童认知发展规律。
最后,機器人可有效诱导3~6岁儿童的亲社会行为。与以屏幕为载体的电视和手机相比,机器人具有类人型的三维空间特征,儿童会将与人类同伴的交互模式复制到与机器人的交流中,产生更自然的交互行为。研究结果显示,3~6岁儿童在机器人呈现悲伤、害怕、生气负向情绪时,表现出显著的接近趋势和亲社会行为。亲社会行为反映儿童试图帮助或安慰他人的行为,学前期对儿童亲社会行为的培养至关重要。相比观看电视和手机的被动教育方式,机器人的体验式教育更符合学前儿童的认知特点和学习模式,并且能够通过观测儿童行为更直观地检验学习结果。
研究还存在局限性与不足。本文基于电视和手机对儿童影响的相关研究,针对其存在的儿童被动接受问题,研究3~6岁儿童与机器人的交互主动性及相关影响因素。儿童对机器人的感知和认知是动态变化的,受家庭、社会、科技发展等多因素影响,也受曝光效应影响,②本次研究结果反映当下时间和地点及被试人群的交互反馈,后续将开展长期交互效应的研究。由于疫情原因,幼儿园普遍管控严格,实验被试数量偏少。尼尔森(Nielsen)等指出人机交互研究中,5个用户可以发现80%以上的可用性问题,[46]因此对于儿童与机器人的交互行为研究,每个年龄组10个被试是能说明问题的。由于幼儿园安全要求,实验采取2名实验员、2名同龄儿童共同开展实验。基于实验过程,发现儿童间互相影响作用不明显,但儿童与机器人的交互行为受到儿童性格差异影响,本次实验主要考察年龄因素对人机交互的影响,未来研究将验证性格因素的影响。而且,儿童陪伴机器人无法代替家长的陪伴,其设计定位应是辅助与协同家长进行陪伴与教育,相关研究待持续深入开展。
六、建议
亲情陪伴永远是儿童最好的成长港湾。儿童陪伴机器人相较于电视及手机等媒介产品具有一定的交互优势,但仍无法替代家长。机器人可以作为家长与儿童的互动中介,或孩子缺乏陪伴时的互动同伴,其设计定位是辅助家长进行陪伴与教育,使得儿童获得更好的成长。基于以上研究,对面向3~6岁儿童的陪伴机器人设计提出以下建议:
第一,机器人形态设计考虑儿童年龄认知差异。具有拟人特征的机器人更容易正向影响3~4岁儿童对机器人的感知,因此,面向低龄儿童的陪伴机器人可以通过提升拟人形态设计提升儿童与机器人的交互效应。4~6岁儿童处于认知快速发展期,与机器人互动意愿和互动行为显著提升,陪伴机器人设计要更加注重多感官的交互设计,注重交互体验。
第二,机器人交互设计应注重亲社会行为的诱导。研究结果显示,3~6岁儿童在机器人呈现负向情绪比正向情绪表现出更显著的亲社会行为。目前市场上的陪伴机器人为取悦儿童普遍只展示积极情绪特征,但机器人惯性讨好人类会促发儿童自大型媒介化性格特征的形成,[47]并不利于儿童发展。因此,儿童陪伴机器人设计不能只表现正向情绪,而应通过情景模拟、情感演绎有目的地帮助儿童进行情绪管理训练,从而培养儿童的亲社会行为。
注释:
①自由度是机器人机构能够独立运动的关节数目,通常作为机器人的技术指标,反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。
②曝光效应,又谓多看效应、(简单、单纯)暴露效应、(纯粹)接触效应等,它是一种心理现象,指的是我们会偏好自己熟悉的事物。社会心理学又把这种效应叫作熟悉定律,我们把这种只要经常出现就能增加喜欢程度的现象叫作曝光效应。
参考文献:
[1]熊怡程,喻昊雪,刘玉平,等.看电视对幼儿执行功能的即时与长时影响——基于一项追踪研究的发现[J].学前教育研究,2022(08):53-63.
[2]POULAIN T, VOGEL M, NEEF M, et al. Reciprocal associations between electronic media use and behavioral difficulties in preschoolers[J]. International Journal of Environmental Research & Public Health, 2018,15(4):814.
[3]LIN H P, CHEN K L, CHOU W, et al. Prolonged touch screen device usage is associated with emotional and behavioral problems, but not language delay, in toddlers[J]. Infant Behavior and Development, 2020,58:101424.
[4]邢淑芬,蔣莹,高鑫,等.电视对学前儿童执行功能发展的长时效应:一项实证研究[J].教育研究,2017,38(8):109-119.
[5]ZHANG Q, CAO Y, TIAN J J, et al. Effects of prosocial cartoon models on aggressive cognitions and aggressive behaviors[J]. Children and Youth Services Review,2020(118):1-2.
[6]SINGER R N. Motor learning and human performance[M]. New York: Macmillan,1980:89.
[7]HACKMAN D A, GALLOP R, EVANS G W, et al. Socioeconomic status and executive function: developmental trajectories and mediation[J]. Developmental Science,2015,18(5):686-702.
[8]FAY-STAMMBACH T, HAWES D J, MEREDITH P. Parenting influences on executive function in early childhood: a review[J]. Child Development Perspectives,2014,4(8):258-264.
[9]LEE H E, KIM J Y, KIM C. The influence of parent media use, parent attitude on media, and parenting style on children’s media use[J]. Children(Basel),2022,9(1):1-12.
[10]王志浩,吴偶.儿童成长陪伴机器人与教育资源平等[J].科技导报,2015,33(21):99-100.
[11]田荣业,王雅婷,林伊.关于儿童智能早教机器人市场的研究[J].中国市场,2022(20):78-81.
[12][28]王瑶筠,王彦峰.国外儿童机器人教育研究的现状与思考——基于2006—2019年的文献分析[J].教育探索,2020(06):24-29.
[13]MIODUSER D, LEVY S T. Making sense by building sense: kindergarten children’s construction and understanding of adaptive robot behaviors[J]. International Journal of Computer Mathematics,2010(15):99-127.
[14]JANKA P. Using a programmable toy at preschool age: why and how?[J]. International Conference on Simulation, Modeling and Programming for Autonomous Robots,2008(11):112-121.
[15]ECK J, HIRSCHMUGL-GAISCH S, HOFMANN A, et al. Innovative concepts in educational robotics: robotics projects for kindergartens in Austria[R]. Vienna: Austrian Robotics Workshop,2013: 10-12.
[16]TUNG F W. Child perception of humanoid robot appearance and behavior[J]. International Journal of Human-Computer Interaction,2016,32(6):493-502.
[17]SCASSELLATI B. How social robots will help us to diagnose, treat, and understand autism[M]. Heidelberg: Springer,2007:552-563.
[18]TANAKA F, MATSUZOE S. Children teach a care-receiving robot to promote their learning: field experiments in a classroom for vocabulary learning[J]. Journal of Human-Robot Interaction,2012:78-95.
[19]易军,凌坚韧.教育机器人情感表达的最优特征模型研究[J].设计,2022,35(1):106-109.
[20]PAPADOPOULOU M T, KARAGEORGIOU E, KECHAYAS P, et.al. Efficacy of a robot-assisted intervention in improving learning performance of elementary school children with specific learning disorders[J]. Children,2022,9(8):1155.
[21]KIM E S, BERKOVITS L D, BERNIER E P, et al. Social robots as embedded reinforcers of social behavior in children with autism[J]. Journal of Autism and Developmental Disorders,2013,43(5):1038-1049.
[22]BERAN T N, RAMIREZ-SERRANO A, VANDERKOOI O G, et al. Reducing children’s pain and distress towards flu vaccinations: a novel and effective application of humanoid robotics[J]. Vaccine,2013,31(25):2772-2777.
[23]陳东帆,李睿强,韩琨.人形机器人技术在孤独症儿童干预中的应用[J].中国康复理论与实践,2015,21(11):1325-1328.
[24]鲍海丽.人形机器人干预联合体感游戏在孤独症谱系障碍儿童康复治疗中的应用[J].中国疗养医学,2021,30(2):157-158.
[25]王永固,余成,黄碧玉,等.社交机器人对ASD儿童社会互动行为的诱导效应[J].应用心理学,2019,25(2):131-139.
[26]许艳凤,张为忠,连榕.教育机器人对儿童语言学习的影响分析[J].教育评论,2019(07):8-13.
[27]SHAMSUDDIN S, YUSSOF H B, MOHAMED S, et al. Telerehabilitation service with a robot for autism intervention[J]. Procedia Computer Science,2015(76):349-354.
[29][30][38]JIPSON J L, GELMAN S A. Robots and rodents: children’s inferences about living and nonliving kinds[J]. Child Development,2007,78(6):1675-1688.
[31][36][37]VAN STRATEN C L, PETER J, KÜHNE R. Child-robot relationship formation: a narrative review of empirical research[J]. International Journal of Social Robotics,2020,12(2):325-344.
[32][33]GIANNOPULU I, TERADA K, WATANABE T. Emotional empathy as a mechanism of synchronisation in child-robot interaction[J]. Front Psychol,2018,9:1852.
[34]张乾一,侯莉敏,史文晴,等.3~5岁幼儿气质与冷、热执行功能:同伴交往的调节效应[J].学前教育研究,2022(04):62-74.
[35]王静梅,张义宾,郑晨烨,等.3~6岁儿童执行功能子成分发展的研究[J].心理发展与教育,2019,35(1):1-10.
[39]KIM M, YI S, LEE D. Between living and nonliving: young children’s animacy judgments and reasoning about humanoid robots[J/OL].(2019-06-28)[2022-10-29].https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0216869.
[40]VERHAGEN J, BERGHE R VAN DEN, OUDGENOEG-PAZ O, et al. Children’s reliance on the non-verbal cues of a robot versus a human[J/OL].(2019-12-19)[2022-10-29].https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0217833.
[41]ZHANG Y, SONG W, TAN Z, et al. Theory of robot mind: false belief attribution to social robots in children with and without autism[J]. Frontiers in Psychology,2019(10):1732.
[42]MARTIN D U, MACINTYRE M I, PERRY C, et al. Young children’s indiscriminate helping behavior toward a humanoid robot[J]. Frontiers in Psychology,2020,11:239.
[43][44]ZAHN-WAXLER C, RADKE-YARROW M, WAGNER, et al. Development of concern for others[J]. Developmental Psychology,1992,28(1):126-136.
[45]HUANG H, SU Y, JIN J. Empathy-related responding in Chinese toddlers: factorial structure and cognitive contributors[J/OL].(2016-03-11)[2022-10-29].https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5484378/.
[46]NIELSEN J, LANDAUER T K. A mathematical-model of the finding of usability problems[M]. Amsterdam: IOS PRESS,1993:206-213.
[47]陈莎,刘斌.拟人非人:人机社交傳播的特点与困境——以与微软小冰的聊天文本为分析对象[J].青年记者,2021(05):62-64.
How Preschoolers Treat and Interact with Companion Robots
LI Jie ZHAO Shuang DIAO Yunhui GUO Shijie
(1School of Architecture and Art Design, Hebei University of Technology, Tianjin 300130 China; 2Hebei Key Laboratory of Smart Sensing and Human-Robot Interaction, Hebei University of Technology, Tianjin 300130 China; 3School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130 China)
Abstract: Because of their biologically inspired features and psychologically complex properties, companion robots have been thought to have more advantages in companying and educating children than TVs and mobile phones. Based on the theory of children’s cognitive development, the study uses questionnaire, emotion simulation and behavior observation to explore preschoolers’ life perception, emotional arousal and behavior induction effects when they interact with robots. The results confirm that children aged 3 to 6 consider that robots are artifacts with emotional properties and agree to make friends with robots. Their emotional arousal and behavior induction during the interaction increas with age. In addition, when robots show negative emotion, children perform more prosocial behaviors. The design and development of companion robots in future should pay attention to children’s age difference and strengthen robots’ function of inducing prosocial behaviors to help parents company and educate children better.
Key words: preschoolers, companion robots, interaction between human and robots
(责任编辑:刘向辉)
